
Войти
 Американская подводная лодка класса " Вирджиния" на ходу в Гротоне, Коннектикут, июль 2004 г.
Американская подводная лодка класса " Вирджиния" на ходу в Гротоне, Коннектикут, июль 2004 г.  Русский Akula -класса подводная часть Северного флота
Русский Akula -класса подводная часть Северного флота Подводная лодка (или суб) представляет собой водный способен независимой работы под воду. Он отличается от подводного аппарата, который имеет более ограниченные возможности под водой. Он также иногда используется исторически или в разговорной речи для обозначения дистанционно управляемых транспортных средств и роботов, а также судов среднего или меньшего размера, таких как сверхмалые подводные лодки и мокрые субмарины. Подводные лодки называются «лодками», а не «кораблями», независимо от их размера.
Хотя экспериментальные подводные лодки строились и раньше, разработка подводных лодок стала популярной в 19 веке, и они были приняты на вооружение несколькими военно-морскими силами. Впервые подводные лодки широко использовались во время Первой мировой войны (1914–1918 гг.), А сейчас они используются во многих крупных и малых военно-морских силах. Военное использование включает в себя атаку вражеских надводных кораблей (торговых и военных) или других подводных лодок, защиту авианосцев, блокаду, ядерное сдерживание, разведку, обычную наземную атаку (например, с использованием крылатой ракеты ) и тайное введение сил специального назначения. Гражданские применения подводных лодок включают морские науки, спасательные работы, разведку, а также инспекцию и техническое обслуживание объектов. Подводные лодки также можно модифицировать для выполнения более специализированных функций, таких как поисково-спасательные операции или ремонт подводных кабелей. Подводные лодки также используются в туризме и подводной археологии. Современные глубоководные подводные лодки произошли от батискафа, который произошел от водолазного колокола.
Большинство крупных подводных лодок состоят из цилиндрического корпуса с полусферическими (или коническими) концами и вертикальной конструкции, обычно расположенной на миделе, в которой размещены устройства связи и зондирования, а также перископы. В современных подводных лодках эта конструкция является « парусом » в американском употреблении и «плавником» в европейском. « Боевая рубка » была характерной чертой более ранних конструкций: отдельный прочный корпус над основной частью лодки, что позволяло использовать более короткие перископы. Сзади находится пропеллер (или струйный насос) и различные стабилизаторы гидродинамики. Небольшие, глубоководные и специализированные подводные лодки могут значительно отличаться от этой традиционной компоновки. Подводные лодки используют водолазные самолеты, а также изменяют количество воды и воздуха в балластных цистернах, чтобы изменить плавучесть при погружении и всплытии.
Подводные лодки обладают одним из самых широких диапазонов типов и возможностей любого судна. Они варьируются от небольших автономных подводных лодок и одно- или двухместных подводных лодок, которые работают в течение нескольких часов, до судов, которые могут оставаться под водой в течение шести месяцев, таких как российские подводные лодки класса «Тайфун», самые большие из когда-либо построенных подводных лодок. Подводные лодки могут работать на большей глубине, чем это возможно для людей- водолазов.
Слово «подводная лодка» просто означает «подводный» или «подводный» (например, « подводный каньон», подводный трубопровод ), хотя как существительное оно обычно относится к судну, которое может путешествовать под водой. Термин представляет собой сокращение от «подводная лодка». и происходит как таковое на нескольких языках, например. Французский ( sous-marin) и испанский ( submarino), хотя другие сохраняют первоначальный термин, например, голландский ( Onderzeeboot), немецкий ( unterseeboot), шведский ( Undervattensbåt) и русский (подводная лодка: podvodnaya lodka), все из которых означает «подводная лодка». По военно-морской традиции подводные лодки все еще обычно называют «лодками», а не «кораблями», независимо от их размера. Хотя неофициально их называют «лодками», американские подводные лодки используют обозначение USS ( Корабль Соединенных Штатов ) в начале своего названия, например USS Alabama. В Королевском флоте обозначение HMS может относиться к «Корабль Ее Величества» или «Подводная лодка Ее Величества», хотя последнее иногда переводится как «HMS / m», а подводные лодки обычно называют «лодками», а не кораблями.
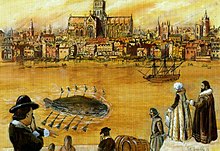 Drebbel, ранний подводный корабль, приводимый в движение веслами.
Drebbel, ранний подводный корабль, приводимый в движение веслами. Согласно отчету в Opusculum Taisnieri, опубликованному в 1562 году:
Два грека несколько раз погружались в воду и всплывали в реке Тежу недалеко от города Толедо в присутствии императора Священной Римской империи Карла V, не промокнув, и пламя, которое они держали в руках, все еще горело.
В 1578 году английский математик Уильям Борн записал в своей книге « Изобретения или разработки» один из первых планов подводного навигационного аппарата. Несколькими годами позже шотландский математик и теолог Джон Нэпир написал в своих « Тайных изобретениях» (1596 г.), что «эти изобретения, помимо изобретений подводного плавания с водолазами, других изобретений и стратегий для нанесения вреда врагам по Милости Божьей и работы экспертов. Ремесленники, которых я надеюсь выступить ». Неясно, реализовал ли он свою идею когда-нибудь.
Первый погружной из которых строительство существует достоверная информация была спроектирована и построена в 1620 году Дреббель, в голландца на службе Джеймса I Англии. Его приводили в движение веслами.
К середине 18 века в Англии было получено более десятка патентов на подводные лодки / подводные лодки. В 1747 году Натаниэль Симонс запатентовал и построил первый известный рабочий пример использования балластной цистерны для погружения. В его конструкции использовались кожаные сумки, которые можно было наполнить водой для погружения корабля. Был использован механизм, который выкручивал воду из мешков и заставлял лодку всплывать на поверхность. В 1749 году журнал Gentlemen's Magazine сообщил, что подобный дизайн был первоначально предложен Джованни Борелли в 1680 году. Дальнейшее совершенствование конструкции застопорилось более века, пока не были применены новые технологии движения и устойчивости.
Первым военным подводным аппаратом была Turtle (1775 г.) - устройство в форме желудя с ручным приводом, разработанное американцем Дэвидом Бушнеллом для размещения одного человека. Это была первая проверенная подводная лодка, способная автономно работать и передвигаться под водой, и первая, в которой для движения использовались винты.
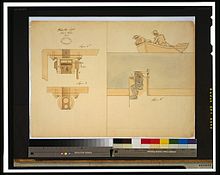 Иллюстрация Роберта Фултона 1806 года, показывающая "погружающуюся лодку"
Иллюстрация Роберта Фултона 1806 года, показывающая "погружающуюся лодку" В 1800 году Франция построила подводную лодку с двигателями человека, разработанную американцем Робертом Фултоном, Nautilus. В конце концов, французы отказались от эксперимента в 1804 году, как и британцы, когда они позже рассматривали проект подводной лодки Фултона.
В 1864 году, в конце Гражданской войны в США, HL Hunley военно - морского флота Конфедерации стала первой военной подводной лодкой, потопившей вражеское судно, военный шлюп Союза USS Housatonic. После успешной атаки на корабль, использовавшей заполненный порохом бочонок на лонжероне в качестве торпедного заряда, HL Hunley также затонул, потому что ударные волны от взрыва мгновенно убили экипаж и не позволили им закачать трюм. или двигая подводную лодку.
В 1866 году Sub Marine Explorer была первой подводной лодкой, которая под контролем экипажа успешно ныряла, крутилась под водой и всплывала на поверхность. Дизайн немецкого американца Юлиуса Х. Крёля (по-немецки Kröhl) включал элементы, которые до сих пор используются в современных подводных лодках.
В 1866 году Флах был построен по заказу чилийского правительства Карлом Флахом, немецким инженером и иммигрантом. Это была пятая подводная лодка, построенная в мире, и вместе со второй подводной лодкой предназначалась для защиты порта Вальпараисо от нападения испанского флота во время войны на островах Чинча.
 Французская подводная лодка Plongeur
Французская подводная лодка Plongeur Подводные лодки не могли использоваться военно-морскими силами для массового или повседневного использования до тех пор, пока не будут разработаны подходящие двигатели. Эпоха с 1863 по 1904 год ознаменовала поворотный момент в развитии подводных лодок, и появилось несколько важных технологий. Ряд стран строили и использовали подводные лодки. Дизель-электрическая силовая установка стала доминирующей системой питания, а такое оборудование, как перископ, стало стандартизированным. Страны провели множество экспериментов по эффективной тактике и вооружению для подводных лодок, что привело к их большому влиянию в Первой мировой войне.
Первой подводной лодкой, не полагающейся на человеческую силу для движения, была французская Plongeur ( Diver), спущенная на воду в 1863 году, на которой использовался сжатый воздух под давлением 180 фунтов на квадратный дюйм (1200 кПа ). Narcís Monturiol разработал первый воздушный-независимый и сгорания Приведено подводной лодки, Ictíneo II, который был запущен в Барселоне, Испания в 1864 году.
Подводная лодка стала потенциально жизнеспособным оружием с разработкой торпеды Уайтхеда, разработанной в 1866 году британским инженером Робертом Уайтхедом, первой практической самоходной или "локомотивной" торпеды. Шпата торпеды, которые были разработаны ранее ВМС США конфедератов считали неосуществимым, поскольку считалось, что потоплен как намеченной цели, и, возможно, HL Ханли, подводную лодку, которая развернутую его.
Ирландский изобретатель Голланд построил модель подводной лодки в 1876 году и в 1878 году продемонстрировал Holland I прототип. За этим последовал ряд неудачных разработок. В 1896 году он спроектировал подводную лодку Holland Type VI, в которой использовалась мощность двигателя внутреннего сгорания на поверхности и энергия аккумуляторной батареи под водой. Запущенный 17 мая 1897 года на военно - морского флота лейтенант Льюис Nixon «s Crescent судоверфи в Элизабет, штат Нью - Джерси, Голландия VI был приобретен ВМС Соединенных Штатов 11 апреля 1900 года, став первой в эксплуатацию подводной лодки ВМФ, окрестил USS Holland.
Дискуссии между английским священнослужителем и изобретателем Джорджем Гарретом и шведским промышленником Торстеном Норденфельтом привели к созданию первых практических подводных лодок с паровыми двигателями, вооруженных торпедами и готовых к использованию в военных целях. Первый был Норденфельт я, 56-тонное, 19,5 метра (64 футов) судно похож на злополучном Гаррет Resurgam (1879 г.), с диапазоном 240 километров (130 НХ; 150 миль), вооружено одной торпедой, в 1885 г.
 Пераль в Картахене, 1888 г.
Пераль в Картахене, 1888 г. Надежные средства движения для подводного судна стали возможны только в 1880-х годах с появлением необходимой технологии электрических батарей. Первые лодки с электроприводом были построены Исааком Пераль-и-Кабальеро в Испании (который построил Пераль ), Дюпюи де Лом (построившим Gymnote ) и Гюставом Зеде (построившим Сирену ) во Франции и Джеймсом Франклином Уоддингтоном (построившим Porpoise) в Англии.. В конструкции Пераля были торпеды и другие системы, которые позже стали стандартом для подводных лодок.
 USS Plunger, спущенный на воду в 1902 году.
USS Plunger, спущенный на воду в 1902 году.  «Акула» (спущена на воду в 1907 году) была первой русской подводной лодкой, способной ходить на большие расстояния.
«Акула» (спущена на воду в 1907 году) была первой русской подводной лодкой, способной ходить на большие расстояния. Введенный в эксплуатацию в июне 1900 года, французский паровой и электрический Narval использовал теперь уже типичную конструкцию с двойным корпусом, с прочным корпусом внутри внешней оболочки. Эти 200-тонные корабли имели дальность действия под водой более 100 миль (161 км). Французская подводная лодка Aigrette в 1904 году еще больше усовершенствовала концепцию, использовав дизельный, а не бензиновый двигатель для надводной мощности. Было построено большое количество этих подводных лодок, семьдесят шесть были построены до 1914 года.
Королевский флот ввел в эксплуатацию пять подводных лодок типа Holland из Виккерс, Барроу-ин-Фернесс, по лицензии Holland Torpedo Boat Company с 1901 по 1903 год. Строительство лодок заняло больше времени, чем предполагалось, и только первая была готова к водолазным испытаниям в sea 6 апреля 1902 года. Хотя конструкция была полностью куплена у американской компании, фактически использованная конструкция представляла собой непроверенное усовершенствование оригинальной голландской конструкции с новым бензиновым двигателем мощностью 180 лошадиных сил (130 кВт).
Впервые эти типы подводных лодок были использованы во время русско-японской войны 1904–05 годов. Из-за блокады Порт-Артура русские отправили свои подводные лодки во Владивосток, где к 1 января 1905 года было семь лодок, которых хватило для создания первого в мире «действующего подводного флота». Новый подводный флот начал патрулирование 14 февраля, обычно продолжительностью около 24 часов каждое. Первое столкновение с японскими военными кораблями произошло 29 апреля 1905 года, когда русская подводная лодка « Сом» была обстреляна японскими торпедными катерами, но затем отступила.
 Немецкая подводная лодка SM U-9, который потопил три британских крейсера в менее чем за час в сентябре 1914 г.
Немецкая подводная лодка SM U-9, который потопил три британских крейсера в менее чем за час в сентябре 1914 г. Военные подводные лодки впервые оказали значительное влияние в Первой мировой войне. Такие силы, как немецкие подводные лодки, участвовали в Первой битве за Атлантику и были ответственны за потопление RMS Lusitania, которое было потоплено в результате неограниченной подводной войны и часто упоминается в числе причин вступления Соединенных Штатов. Штаты в войну.
К моменту начала войны Германия располагала всего двадцатью подводными лодками, готовыми к немедленному ведению боевых действий, хотя в их число входили суда класса U-19 с дизельным двигателем, которые имели достаточную дальность действия 5000 миль (8000 км) и скорость 8 узлов (15 узлов). км / ч), чтобы позволить им эффективно действовать на всем британском побережье. В отличие от этого, в Королевском флоте было всего 74 подводных лодки, хотя и разной эффективности. В августе 1914 года флотилия из десяти подводных лодок отплыла со своей базы в Гельголанде, чтобы атаковать военные корабли Королевского флота в Северном море в рамках первого в истории патрулирования подводных лодок.
Способность подводных лодок функционировать как практические боевые машины основывалась на новой тактике, их количестве и подводных технологиях, таких как комбинированная дизель-электрическая система, разработанная в предыдущие годы. Больше подводных лодок, чем настоящих подводных лодок, подводные лодки работали в основном на поверхности, используя обычные двигатели, время от времени погружаясь в воду для атаки на батарейках. Они были примерно треугольной формы в поперечном сечении, с отчетливым килем для контроля качения на поверхности и отчетливым носом. Во время Первой мировой войны подводные лодки потопили более 5000 кораблей союзников.
Англичане попытались догнать немцев по подводной технике с созданием подводных лодок класса « К». Однако они были чрезвычайно большими и часто сталкивались друг с другом, что вынудило британцев отказаться от конструкции K-класса вскоре после войны.
 Императорский флот Японии «S I-400 -класса подводной лодки, самый большой тип подводной лодки Второй мировой войны
Императорский флот Японии «S I-400 -класса подводной лодки, самый большой тип подводной лодки Второй мировой войны  Модель Прин «s U-47, немецкий WWII типа VII дизель-электрический охотник
Модель Прин «s U-47, немецкий WWII типа VII дизель-электрический охотник Во время Второй мировой войны Германия использовала подводные лодки для разрушительного воздействия в битве за Атлантику, где она пыталась перерезать британские маршруты снабжения, потопив больше торговых судов, чем Британия могла бы заменить. (Судоходство было жизненно важным для снабжения британского населения продовольствием, промышленности - сырьем, а вооруженных сил - топливом и вооружением.) Хотя подводные лодки уничтожили значительное количество кораблей, эта стратегия в конечном итоге провалилась. Хотя подводные лодки были обновлены в межвоенные годы, основным нововведением стала улучшенная связь, зашифрованная с помощью знаменитой шифровальной машины Enigma. Это позволило применить военно - морскую тактику массового нападения ( Руделтактик, широко известный как « волчья стая »), но в конечном итоге привело к падению подводных лодок. К концу войны подводными лодками было потоплено почти 3000 кораблей союзников (175 боевых кораблей, 2825 торговых судов). Несмотря на успех в начале войны, в конечном итоге флот немецких подводных лодок понес тяжелые потери, потеряв 793 подводных лодки и около 28 000 подводников из 41 000, что составляет около 70%.
Императорский флот Японии эксплуатируется самый разнообразный флот подводных лодок любого флота, в том числе Кайтэн экипажем торпеды, сверхмалые подводные лодки ( тип A Ko-hyoteki и Kairyu классы ), средней дальности подводных лодок, специально построенных подводных лодок поставок и дальнего флота подводных лодок. У них также были подводные лодки с самой высокой подводной скоростью во время Второй мировой войны ( подводные лодки класса I-201 ) и подводные лодки, которые могли нести несколько самолетов ( подводные лодки класса I-400 ). Они также были оснащены одной из самых современных торпед конфликта - кислородным двигателем Type 95. Тем не менее, несмотря на их техническое мастерство, Япония решила использовать свои подводные лодки для ведения боевых действий флота и, следовательно, была относительно безуспешной, поскольку военные корабли были быстрыми, маневренными и хорошо защищенными по сравнению с торговыми судами.
Подводные силы были самым эффективным противокорабельным оружием в американском арсенале. Подводные лодки, составляющие лишь около 2% ВМС США, уничтожили более 30% ВМС Японии, в том числе 8 авианосцев, 1 линкор и 11 крейсеров. Подводные лодки США также уничтожили более 60 процентов японского торгового флота, что подорвало способность Японии снабжать свои вооруженные силы и промышленные военные силы. Подводные лодки союзников в войне на Тихом океане уничтожили больше японских кораблей, чем все другое оружие вместе взятое. Этому подвигу в значительной степени способствовала неспособность Императорского флота Японии предоставить адекватные силы сопровождения для торгового флота страны.
Во время Второй мировой войны в составе ВМС США служили 314 подводных лодок, из которых около 260 были отправлены в Тихий океан. Когда японцы напали на Гавайи в декабре 1941 года, в строю было 111 лодок; За годы войны в строй сдано 203 подводных лодки классов Gato, Balao и Tench. Во время войны 52 подводные лодки США были потеряны по всем причинам, из них 48 - непосредственно из-за боевых действий. Подводные лодки США потопили 1560 судов противника общим тоннажем 5,3 млн тонн (55% от общего количества потопленных).
Служба подводных лодок Королевского флота использовалась в основном в классической блокаде Оси. Его основные операционные районы были вокруг Норвегии, в Средиземном море (против маршрутов поставок Оси в Северную Африку ) и на Дальнем Востоке. В той войне британские подводные лодки потопили 2 миллиона тонн судов противника и 57 крупных боевых кораблей, в том числе 35 подводных лодок. Среди них - единственный задокументированный случай, когда подводная лодка затопила другую подводную лодку, когда обе находились под водой. Это произошло, когда ГМС Venturer занимается U-864 ; Venturer экипаж вручную вычислил успешное решение огневого против трехмерно маневрирования цели с использованием методов, которые стали основой современных систем торпеды компьютера ориентируется. 74 британские подводные лодки были потеряны в Средиземном море, большинство из них - 42.
 HMAS Rankin, подводная лодка класса Collins на перископической глубине
HMAS Rankin, подводная лодка класса Collins на перископической глубине  USS Charlotte, подводная лодка класса Лос-Анджелес, курсирует с подводными лодками из стран-партнеров во время RIMPAC 2014.
USS Charlotte, подводная лодка класса Лос-Анджелес, курсирует с подводными лодками из стран-партнеров во время RIMPAC 2014. Первый пуск крылатой ракеты ( SSM-N-8 Regulus ) с подводной лодки произошел в июле 1953 года с палубы военно- морского флота USS Tunny времен Второй мировой войны, модифицированного для перевозки ракет с ядерной боеголовкой. «Танни» и его родственная лодка « Барберо» были первыми в Соединенных Штатах патрульными подводными лодками ядерного сдерживания. В 1950-х годах атомная энергетика частично заменила дизель-электрическую силовую установку. Также было разработано оборудование для извлечения кислорода из морской воды. Эти два нововведения дали подводным лодкам возможность оставаться под водой в течение недель или месяцев. Большинство подводных лодок, построенных с тех пор в США, Советском Союзе / Российской Федерации, Великобритании и Франции, были оснащены ядерными реакторами.
В 1959–1960 годах первые подводные лодки с баллистическими ракетами были приняты на вооружение как Соединенными Штатами ( класс Джорджа Вашингтона ), так и Советским Союзом ( класс «Гольф» ) в рамках стратегии ядерного сдерживания времен холодной войны.
Во время холодной войны США и Советский Союз содержали большие подводные флоты, которые играли в кошки-мышки. Советский Союз потерял по меньшей мере четыре подводные лодки за этот период: К-129 была потеряна в 1968 году (часть которой ЦРУ извлекло со дна океана с помощью корабля Glomar Explorer, спроектированного Говардом Хьюзом ), К-8 в 1970 году, К- 219 в 1986 году и « Комсомолец» в 1989 году (рекорд глубины среди военных подводных лодок - 1000 м (3300 футов)). Многие другие советские подводные лодки, такие как К-19 (первая советская атомная подводная лодка и первая советская подводная лодка, достигшая Северного полюса), были сильно повреждены огнем или утечками радиации. За это время США потеряли две атомные подводные лодки: USS Thresher из-за отказа оборудования во время испытательного погружения на пределе своих возможностей и USS Scorpion по неизвестным причинам.
Во время вмешательства Индии в Освободительной войне Бангладеша, то ВМС Пакистана «s Hangor погружали индийский фрегат INS Khukri. Это было первое затопление подводной лодки со времен Второй мировой войны. Во время той же войны « Гази», подводная лодка класса « Тенч», предоставленная Пакистану в аренду у США, была потоплена ВМС Индии. Это была первая боевая потеря подводной лодки со времен Второй мировой войны. В 1982 году во время войны за Фолклендские острова аргентинский крейсер « Генерал Бельграно» был потоплен британской подводной лодкой HMS Conqueror, что стало первым потоплением атомной подводной лодки на войне. Несколько недель спустя, 16 июня, во время войны в Ливане, неназванная израильская подводная лодка торпедировала и затопила ливанскую лодку « Транзит», которая перевозила 56 палестинских беженцев на Кипр, полагая, что это судно эвакуирует антиизраильских ополченцев. Корабль был поражен двумя торпедами, успел сесть на мель, но в итоге затонул. Погибло 25 человек, в том числе ее капитан. Израильский флот раскрыл инцидент в ноябре 2018 года.
 Немецкая подводная лодка класса UC-1 времен Первой мировой войны. Провода, идущие от носовой части к боевой рубке, являются прыгунами.
Немецкая подводная лодка класса UC-1 времен Первой мировой войны. Провода, идущие от носовой части к боевой рубке, являются прыгунами.  EML Lembit в Эстонском морском музее. « Лембит» - единственная оставшаяся в мире подводная лодка-заградитель этой серии.
EML Lembit в Эстонском морском музее. « Лембит» - единственная оставшаяся в мире подводная лодка-заградитель этой серии. До и во время Второй мировой войны основной задачей подводных лодок была борьба с надводными кораблями. Подводные лодки могли атаковать либо на поверхности с помощью палубных орудий, либо подводными с помощью торпед. Они были особенно эффективны при потоплении трансатлантических судов союзников во время обеих мировых войн, а также в нарушении японских маршрутов снабжения и военно-морских операций в Тихом океане во время Второй мировой войны.
Минные подводные лодки были разработаны в начале 20 века. Объект использовался в обеих мировых войнах. Подводные лодки также использовались для высадки и удаления тайных агентов и вооруженных сил в специальных операциях, для сбора разведданных и для спасения экипажей во время воздушных атак на острова, где летчикам сообщали о безопасных местах для аварийной посадки, чтобы подводные лодки могли их спасти.. Подводные лодки могли перевозить грузы через враждебные воды или выступать в качестве судов снабжения для других подводных лодок.
Подводные лодки обычно могли обнаруживать и атаковать другие подводные лодки только на поверхности, хотя HMS Venturer удалось потопить U-864 с четырьмя торпедами, когда обе были под водой. Британский разработан специализированный противолодочной подводной лодки в Первой мировой войне, в классе R. После Второй мировой войны, с развитием самонаводящейся торпеды, улучшенных гидроакустических систем и ядерной двигательной установки, подводные лодки также получили возможность эффективно охотиться друг на друга.
Развитие баллистических ракет подводных лодок и крылатых ракет подводных лодок дало подводным лодкам существенную и дальнобойную способность атаковать как наземные, так и морские цели с помощью разнообразного оружия, от кассетных бомб до ядерного оружия.
Основная защита подводной лодки заключается в ее способности оставаться скрытой в глубинах океана. Ранние подводные лодки можно было обнаружить по издаваемому ими звуку. Вода является отличным проводником звука (намного лучше, чем воздух), а подводные лодки могут обнаруживать и отслеживать сравнительно шумные надводные корабли с больших расстояний. Современные подводные лодки строятся с упором на малозаметность. Усовершенствованная конструкция гребных винтов, обширная звукоизоляция и специальное оборудование помогают подводной лодке оставаться такой же тихой, как окружающий шум океана, что затрудняет их обнаружение. Чтобы найти и атаковать современные подводные лодки, нужны специальные технологии.
Активный гидролокатор использует отражение звука, излучаемого поисковым оборудованием, для обнаружения подводных лодок. Он использовался со времен Второй Мировой войны на надводных кораблях, подводных лодках и самолетах (с помощью сбрасываемых буев и «опускающихся» массивов вертолетов), но он показывает местоположение источника излучения и может быть принят контрмерами.
Скрытая военная подводная лодка представляет собой реальную угрозу, и из-за своей скрытности может вынудить вражеский флот тратить ресурсы на поиски больших участков океана и защиту кораблей от нападения. Это преимущество было ярко продемонстрировано во время Фолклендской войны 1982 года, когда британская атомная подводная лодка HMS Conqueror потопила аргентинский крейсер General Belgrano. После затопления ВМС Аргентины осознали, что у них нет эффективной защиты от нападения подводных лодок, и надводный флот Аргентины отошел в порт до конца войны, хотя аргентинская подводная лодка осталась в море.
Хотя большинство подводных лодок в мире являются военными, есть несколько гражданских подводных лодок, которые используются для туризма, разведки, осмотра нефтяных и газовых платформ и обследования трубопроводов. Некоторые из них также используются в незаконной деятельности.
Submarine Voyage поездка открылась в Диснейленде в 1959 году, но, хотя он бежал под водой он не был настоящая субмариной, так как он побежал на рельсах и был открыт в атмосферу. Первой туристической подводной лодкой была Auguste Piccard, вступившая в строй в 1964 году на выставке Expo64. К 1997 году в мире действовало 45 туристических подводных лодок. Подводные лодки с глубиной столкновения в диапазоне 400–500 футов (120–150 м) эксплуатируются в нескольких районах по всему миру, как правило, с глубиной дна от 100 до 120 футов (от 30 до 37 м) и грузоподъемностью от 50 до 100. пассажиры.
Как правило, надводное судно доставляет пассажиров в зону морских операций и загружает их в подводную лодку. Затем подводная лодка посещает подводные достопримечательности, такие как естественные или искусственные рифовые сооружения. Для безопасного всплытия без опасности столкновения местоположение субмарины отмечается выпуском воздуха, а выход на поверхность координируется наблюдателем на вспомогательном плавсредстве.
Недавнее событие - это развертывание южноамериканскими контрабандистами наркотиков так называемых наркоподводных лодок, чтобы избежать обнаружения правоохранительными органами. Хотя они иногда используют настоящие подводные лодки, большинство из них представляют собой самоходные полупогружные аппараты, часть которых все время остается над водой. В сентябре 2011 года колумбийские власти изъяли 16-метровую подводную лодку, вмещающую 5 человек, стоимостью около 2 миллионов долларов. Судно принадлежало повстанцам FARC и могло перевозить не менее 7 тонн наркотиков.

Модель мезоскафа Огюста Пикара

Интерьер туристической подводной лодки Atlantis во время затопления
Туристическая подводная лодка Атлантида
 Ударная подводная лодка ВМС США USS Annapolis стоит в Северном Ледовитом океане после того, как всплыла через один метр льда во время ледовых учений 2009 года 21 марта 2009 года.
Ударная подводная лодка ВМС США USS Annapolis стоит в Северном Ледовитом океане после того, как всплыла через один метр льда во время ледовых учений 2009 года 21 марта 2009 года. 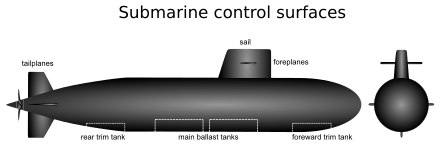 Иллюстрация, показывающая органы управления подводной лодкой
Иллюстрация, показывающая органы управления подводной лодкой  USS Seawolf (SSN-21) Панель управления судном, с коромыслами для поверхностей управления (самолеты и руль направления) и панель управления балластом (фон), для управления водой в танках и дифферентах судна
USS Seawolf (SSN-21) Панель управления судном, с коромыслами для поверхностей управления (самолеты и руль направления) и панель управления балластом (фон), для управления водой в танках и дифферентах судна Все надводные корабли, а также надводные подводные лодки находятся в состоянии положительной плавучести, их вес меньше, чем объем воды, который они бы вытеснили, если бы полностью погрузились в воду. Для гидростатического погружения корабль должен иметь отрицательную плавучесть за счет увеличения собственного веса или уменьшения водоизмещения. Чтобы контролировать их водоизмещение, на подводных лодках есть балластные цистерны, в которых может находиться различное количество воды и воздуха.
Для общего погружения или всплытия подводные лодки используют носовые и кормовые цистерны, называемые главными балластными цистернами (ОБТ), которые заполняются водой для погружения или воздухом для выхода на поверхность. Под водой ОБТ обычно остаются затопленными, что упрощает их конструкцию, и на многих подводных лодках эти танки представляют собой часть межкорпусного пространства. Для более точного и быстрого контроля глубины подводные лодки используют танки контроля глубины (DCT) меньшего размера, которые также называются жесткими танками (из-за их способности выдерживать более высокое давление) или танками дифферента. Количество воды в резервуарах для контроля глубины можно контролировать для изменения глубины или для поддержания постоянной глубины при изменении внешних условий (в основном плотности воды). Резервуары управления глубиной могут быть расположены либо рядом с центром тяжести подводной лодки, либо разделены вдоль корпуса подводной лодки, чтобы не повлиять на дифферент.
При погружении давление воды на корпус подводной лодки может достигать 4 МПа (580 фунтов на квадратный дюйм ) для стальных подводных лодок и до 10 МПа (1500 фунтов на квадратный дюйм) для титановых подводных лодок, таких как К-278 «Комсомолец», в то время как внутреннее давление остается относительно неизменным. Эта разница приводит к сжатию корпуса, что снижает водоизмещение. Плотность воды также незначительно увеличивается с глубиной, так как соленость и давление выше. Это изменение плотности не полностью компенсирует сжатие корпуса, поэтому плавучесть уменьшается с увеличением глубины. Подводная лодка находится в неустойчивом равновесии, имеет тенденцию либо тонуть, либо всплывать на поверхность. Поддержание постоянной глубины требует постоянной работы либо резервуаров контроля глубины, либо поверхностей управления.
Подводные лодки с нейтральной плавучестью по своей сути не являются устойчивыми по дифференту. Для поддержания требуемого дифферента на подводных лодках используются танки носового и кормового дифферента. Насосы могут перемещать воду между баками, изменяя распределение веса и направляя переводник вверх или вниз. Подобная система иногда используется для поддержания стабильности.
 Парус французской атомной подводной лодки Casabianca ; обратите внимание на водолазные самолеты, замаскированные мачты, перископ, мачты радиоэлектронной борьбы, люк и мертвый фонарь.
Парус французской атомной подводной лодки Casabianca ; обратите внимание на водолазные самолеты, замаскированные мачты, перископ, мачты радиоэлектронной борьбы, люк и мертвый фонарь. Гидростатический эффект танков переменного балласта - не единственный способ управлять подводной лодкой под водой. Гидродинамическое маневрирование осуществляется несколькими управляющими поверхностями, известными под общим названием водолазные самолеты или гидросамолеты, которые можно перемещать для создания гидродинамических сил, когда подводная лодка движется с достаточной скоростью. В классической крестообразной конфигурации кормы горизонтальные кормовые плоскости служат той же цели, что и танки дифферента, управляя дифферентом. Большинство подводных лодок дополнительно имеют носовые горизонтальные плоскости, обычно размещаемые на носу до 1960-х годов, но часто на парусах более поздних конструкций. Они расположены ближе к центру тяжести и используются для контроля глубины с меньшим влиянием на дифферент.
Когда подводная лодка выполняет аварийный всплытие, все методы глубины и дифферента используются одновременно, а также подъем лодки вверх. Такое всплытие происходит очень быстро, поэтому субмарина может даже частично выпрыгнуть из воды, потенциально повредив подводные системы.
 Вид сзади модели шведской подводной лодки HMS Sjöormen, первой серийной подводной лодки с крестообразной кормой
Вид сзади модели шведской подводной лодки HMS Sjöormen, первой серийной подводной лодки с крестообразной кормой Интуитивно кажется, что лучший способ сконфигурировать поверхности управления на корме подводной лодки - это придать им форму креста, если смотреть с задней стороны судна. В этой конфигурации, которая долгое время оставалась доминирующей, горизонтальные плоскости используются для управления дифферентом и глубиной, а вертикальные плоскости - для управления боковыми маневрами, как руль надводного корабля.
В качестве альтернативы, однако, задние управляющие поверхности могут быть объединены в то, что стало известно как x-корма или x-руль направления. Такая конфигурация, хотя и менее интуитивно понятна, имеет ряд преимуществ по сравнению с традиционной крестообразной схемой. Во-первых, он улучшает маневренность как по горизонтали, так и по вертикали. Во-вторых, меньше вероятность повреждения рулевых поверхностей при посадке на морское дно или выходе с него, а также при швартовке и отшвартовке. Наконец, это безопаснее, потому что одна из двух диагональных линий может противодействовать другой как по вертикали, так и по горизонтали, если одна из них случайно застрянет.
 USS Albacore, первая подводная лодка, на практике использовавшая x-руль, выставлена в Портсмуте, штат Нью-Гэмпшир.
USS Albacore, первая подводная лодка, на практике использовавшая x-руль, выставлена в Портсмуте, штат Нью-Гэмпшир. X-корма впервые была испытана на практике в начале 1960-х годов на экспериментальной подводной лодке ВМС США USS Albacore. Хотя такое расположение было признано выгодным, оно, тем не менее, не использовалось на серийных подводных лодках США, поскольку оно требует использования компьютера для управления поверхностями управления для достижения желаемого эффекта. Вместо этого первыми, кто использовал x-корму в стандартных операциях, был Шведский флот с классом Sjöormen, головная подводная лодка которого была спущена на воду в 1967 году, еще до того, как Albacore завершила свои испытательные запуски. Поскольку на практике оказалось, что все последующие классы шведских подводных лодок ( Näcken, Västergötland, Gotland и Blekinge ) будут иметь или будут поставляться с x-рулем.
 Х-руль HMS Neptun, подводной лодки класса Näcken, находившейся на вооружении ВМС Швеции в 1980–1998 годах, теперь демонстрируется в Marinmuseum в Карлскруне.
Х-руль HMS Neptun, подводной лодки класса Näcken, находившейся на вооружении ВМС Швеции в 1980–1998 годах, теперь демонстрируется в Marinmuseum в Карлскруне. Верфи Kockums отвечает за дизайн х корм на шведских подлодках в конечном счете экспортировали его в Австралию с Collins классом, а также в Японию с Soryu классом. С появлением типа 212 его стали использовать военно-морские силы Германии и Италии. ВМС США с классом Columbia, ВМС Великобритании с классом Dreadnought и ВМС Франции с классом Barracuda вот-вот присоединятся к семейству x-stern. Следовательно, судя по ситуации в начале 2020-х годов, x-stern скоро станет доминирующей технологией.
 В ВМС США в Лос - Анджелесе -класса USS Greeneville в сухом доке, показывая сигарообразный корпус
В ВМС США в Лос - Анджелесе -класса USS Greeneville в сухом доке, показывая сигарообразный корпус Современные подводные лодки имеют форму сигары. Эту конструкцию, также использовавшуюся на очень ранних подводных лодках, иногда называют « каплевидным корпусом ». Он снижает гидродинамическое сопротивление при погружении субмарины, но снижает мореходные качества и увеличивает сопротивление при нахождении на поверхности. Поскольку ограничения силовых установок ранних подводных лодок вынуждали их большую часть времени работать в надводном положении, конструкция их корпуса была компромиссом. Из-за медленных подводных скоростей этих подводных лодок, обычно значительно ниже 10 узлов (18 км / ч), повышенное сопротивление при движении под водой было приемлемым. В конце Второй мировой войны, когда технологии позволили работать под водой быстрее и дольше, а усиление наблюдения за самолетами вынудило подводные лодки оставаться под водой, конструкция корпуса снова стала каплевидной, чтобы уменьшить сопротивление и шум. USS Albacore (AGSS-569) была уникальной исследовательской подводной лодкой, которая стала пионером американской версии каплевидной формы корпуса (иногда называемой «корпусом Albacore») современных подводных лодок. На современных военных подводных лодках внешний корпус покрыт слоем звукопоглощающей резины или безэховой обшивкой для уменьшения обнаружения.
Прочные корпуса глубоководных подводных лодок, таких как DSV Alvin, имеют сферическую форму, а не цилиндрическую. Это позволяет более равномерно распределять напряжение на больших глубинах. Титановая рама обычно прикрепляется к внешней стороне прочного корпуса, обеспечивая крепление для систем балласта и дифферента, научной аппаратуры, аккумуляторных батарей, синтаксической плавучей пены и освещения.
Поднятая башня на вершине стандартной подводной лодки вмещает перископ и мачты электроники, которые могут включать радио, радар, радиоэлектронную борьбу и другие системы. Он также может включать в себя мачту для подводного плавания. Во многих ранних классах подводных лодок (см. Историю) диспетчерская, или «conn», располагалась внутри этой башни, которая была известна как « боевая рубка ». С тех пор коннектор находился внутри корпуса подводной лодки, а башня теперь называется « парусом ». Коннектор отличается от «мостика», небольшой открытой платформы в верхней части паруса, используемой для наблюдения во время работы на поверхности.
«Ванны» относятся к боевым рубкам, но используются на небольших подводных лодках. Ванна представляет собой металлический цилиндр, окружающий люк, который предотвращает попадание волн прямо в кабину. Это необходимо потому, что надводные лодки имеют ограниченный надводный борт, то есть лежат низко в воде. Ванны помогают предотвратить затопление судна.
 U-995, подводная лодка типа VIIC / 41 времен Второй мировой войны, демонстрирующая корабельные линии внешнего корпуса для передвижения по поверхности, слитая с цилиндрической конструкцией прочного корпуса.
U-995, подводная лодка типа VIIC / 41 времен Второй мировой войны, демонстрирующая корабельные линии внешнего корпуса для передвижения по поверхности, слитая с цилиндрической конструкцией прочного корпуса. Современные подводные лодки и подводные аппараты, как и самые ранние модели, обычно имеют однокорпусный корпус. Большие подводные лодки обычно имеют дополнительный корпус или секции корпуса снаружи. Этот внешний корпус, который фактически образует форму подводной лодки, называется внешним корпусом ( кожух в Королевском флоте) или легким корпусом, поскольку он не должен выдерживать перепад давления. Внутри внешнего корпуса имеется сильная оболочка или корпус давления, который выдерживает давление на море и имеет нормальное внутреннее атмосферное давление.
Еще во время Первой мировой войны стало понятно, что оптимальная форма для выдерживания давления противоречит оптимальной форме для обеспечения мореходности и минимального сопротивления, а трудности строительства еще больше усложнили проблему. Это было решено либо компромиссной формой, либо использованием двух корпусов: внутреннего для удержания давления и внешнего для оптимальной формы. До конца Второй мировой войны у большинства подводных лодок было дополнительное частичное покрытие сверху, на носу и корме, сделанное из более тонкого металла, которое при погружении затоплялось. Германия пошла дальше с Type XXI, общим предшественником современных подводных лодок, у которых прочный корпус был полностью заключен внутри легкого корпуса, но оптимизирован для подводного плавания, в отличие от более ранних конструкций, которые были оптимизированы для работы на поверхности.
 Подводная лодка Тип XXI, конец Второй мировой войны, с прочным корпусом, почти полностью заключенным внутри легкого корпуса
Подводная лодка Тип XXI, конец Второй мировой войны, с прочным корпусом, почти полностью заключенным внутри легкого корпуса После Второй мировой войны подходы разделились. Советский Союз изменил свои конструкции, основываясь на немецких разработках. Все послевоенные тяжелые советские и российские подводные лодки построены с двойным корпусом. Американские и большинство других западных подводных лодок перешли на преимущественно однокорпусный подход. У них все еще есть легкие секции корпуса в носовой и кормовой частях, в которых размещены главные балластные цистерны и которые обеспечивают гидродинамически оптимизированную форму, но основная цилиндрическая секция корпуса имеет только один слой обшивки. Для будущих подводных лодок в Соединенных Штатах рассматриваются двойные корпуса с целью повышения грузоподъемности, малозаметности и дальности полета.
 В 1960 году Жак Пикар и Дон Уолш были первыми людьми, которые исследовали самую глубокую часть мирового океана и самое глубокое место на поверхности земной коры в Батискафе Триест, спроектированном Огюстом Пикаром.
В 1960 году Жак Пикар и Дон Уолш были первыми людьми, которые исследовали самую глубокую часть мирового океана и самое глубокое место на поверхности земной коры в Батискафе Триест, спроектированном Огюстом Пикаром. Прочный корпус, как правило, изготавливается из толстой высокопрочной стали со сложной конструкцией и большим запасом прочности и разделен водонепроницаемыми переборками на несколько отсеков. Есть также примеры более двух корпусов подводных лодок, таких как класс «Тайфун», который имеет два основных герметичных корпуса и три меньших корпуса для диспетчерской, торпед и рулевого механизма, с системой запуска ракет между основными корпусами.
Глубина погружения не может быть легко увеличена. Простое увеличение толщины корпуса увеличивает вес и требует уменьшения веса бортового оборудования, что в конечном итоге приводит к получению батискафа. Это приемлемо для гражданских исследовательских подводных лодок, но не для военных подводных лодок.
Подводные лодки Первой мировой войны имели корпуса из углеродистой стали с максимальной глубиной 100 метров (330 футов). Во время Второй мировой войны была представлена высокопрочная легированная сталь, позволяющая работать на глубине до 200 метров (660 футов). Сегодня высокопрочная легированная сталь остается основным материалом для подводных лодок с глубиной 250–400 метров (820–1310 футов), которая не может быть превышена на военной подводной лодке без компромиссов в конструкции. Чтобы превысить этот предел, несколько подводных лодок были построены с титановыми корпусами. Титан может быть прочнее стали, легче и не ферромагнитен, что важно для скрытности. Титановые подводные лодки были построены Советским Союзом, который разработал специализированные высокопрочные сплавы. Изготовлено несколько типов титановых подводных лодок. Титановые сплавы позволяют значительно увеличить глубину, но другие системы должны быть переработаны, чтобы справиться с ними, поэтому испытательная глубина была ограничена до 1000 метров (3300 футов) для советской подводной лодки К-278 «Комсомолец», самой глубоководной боевой подводной лодки. Альфа-класс подводных лодок может успешно эксплуатироваться на высоте 1300 метров (4,300 футов), хотя непрерывная работа на таких глубинах будет производить чрезмерное напряжение на многих системах подводных лодок. Титан не изгибается так же быстро, как сталь, и может стать хрупким после многих циклов погружения. Несмотря на свои преимущества, высокая стоимость титановой конструкции привела к отказу от строительства титановых подводных лодок после окончания холодной войны. Гражданские субмарины, ныряющие на глубоководье, использовали толстые акриловые прочные корпуса.
На сегодняшний день самым глубоким аппаратом глубокого погружения (DSV) является Триест. 5 октября 1959 года Триест отправился из Сан-Диего на Гуам на борту грузового судна « Санта-Мария» для участия в проекте «Нектон» - серии очень глубоких погружений в Марианской впадине. 23 января 1960 года Триест достиг дна океана в Глубине Челленджера (самая глубокая южная часть Марианской впадины) на борту Жака Пикара (сына Огюста) и лейтенанта Дона Уолша, USN. Это был первый раз, когда судно с экипажем или без экипажа достигло самой глубокой точки в Мировом океане. Бортовые системы показали глубину 11 521 метр (37 799 футов), хотя позже она была изменена до 10916 метров (35 814 футов), а более точные измерения, сделанные в 1995 году, показали, что Глубина Челленджера немного мельче - 10911 метров (35 797 футов).
Построить прочный корпус сложно, так как он должен выдерживать давление на требуемой глубине погружения. Когда корпус имеет идеально круглое поперечное сечение, давление распределяется равномерно и вызывает только сжатие корпуса. Если форма не идеальна, то корпус изгибается, в нескольких точках сильно деформируется. Неизбежным незначительным отклонениям препятствуют кольца жесткости, но даже отклонение от круглости на один дюйм (25 мм) приводит к снижению максимальной гидростатической нагрузки более чем на 30 процентов и, следовательно, глубины погружения. Поэтому корпус должен быть сконструирован с высокой точностью. Все части корпуса должны быть сварены без дефектов, а все стыки проверяться многократно разными методами, что обуславливает высокую стоимость современных подводных лодок. (Например, каждая ударная подводная лодка класса « Вирджиния» стоит 2,6 миллиарда долларов, то есть более 200 тысяч долларов за тонну водоизмещения.)
 HMCS Windsor, A Royal Canadian Navy Виктория -класса дизель-электрический охотник-убийца подводной лодки
HMCS Windsor, A Royal Canadian Navy Виктория -класса дизель-электрический охотник-убийца подводной лодки Первые подводные лодки приводились в движение людьми. Первой подводной лодкой с механическим приводом была французская Plongeur 1863 года, в которой в качестве двигателя использовался сжатый воздух. Анаэробная силовая установка была впервые применена на испанском Ictineo II в 1864 году, в котором использовался раствор цинка, диоксида марганца и хлората калия для выработки тепла, достаточного для питания парового двигателя, а также обеспечения кислородом экипажа. Подобная система не использовалась снова до 1940 года, когда ВМС Германии испытали систему на основе перекиси водорода, турбину Вальтера, на экспериментальной подводной лодке V-80, а затем и на морских подводных лодках U-791 и типа XVII ; Система получила дальнейшее развитие для класса British Explorer, построенного в 1958 году.
До появления ядерных морских силовых установок большинство подводных лодок 20-го века использовали электродвигатели и батареи для работы под водой и двигателей внутреннего сгорания на поверхности, а также для подзарядки батарей. Ранние подводные лодки использовали бензиновые (бензиновые) двигатели, но они быстро уступили место керосиновым (парафиновым), а затем и дизельным двигателям из-за пониженной воспламеняемости и, с дизельным двигателем, улучшенной топливной эффективности и, следовательно, большей дальности полета. Сочетание дизельной и электрической силовой установки стало нормой.
Первоначально двигатель внутреннего сгорания и электродвигатель в большинстве случаев были подключены к одному и тому же валу, так что оба могли напрямую приводить в движение винт. Двигатель внутреннего сгорания располагался в передней части кормовой части, за ним располагался электродвигатель, за которым следовал гребной вал. Двигатель был соединен с двигателем с помощью муфты, а двигатель, в свою очередь, был соединен с карданным валом с помощью другой муфты.
При включенном только заднем сцеплении электродвигатель мог приводить в движение гребной винт, что требовалось для работы в полностью погруженном состоянии. При включенных обоих сцеплениях двигатель внутреннего сгорания мог приводить в движение гребной винт, что было возможно при работе на поверхности или, на более позднем этапе, при плавании с маской и трубкой. Электродвигатель в этом случае служил бы генератором для зарядки аккумуляторов или, если зарядка не требовалась, мог бы свободно вращаться. При включенном только переднем сцеплении двигатель внутреннего сгорания мог приводить в действие электродвигатель в качестве генератора для зарядки аккумуляторов без одновременного приведения гребного винта в движение.
Двигатель мог иметь несколько якорей на валу, которые могли быть электрически соединены последовательно для низкой скорости и параллельно для высокой скорости (эти соединения назывались «группа вниз» и «группа вверх» соответственно).
 Зарядка аккумулятора ( JMSDF ) Дополнительная информация: Дизель-электрическая трансмиссия.
Зарядка аккумулятора ( JMSDF ) Дополнительная информация: Дизель-электрическая трансмиссия. В то время как на большинстве ранних подводных лодок использовалось прямое механическое соединение между двигателем внутреннего сгорания и гребным винтом, альтернативное решение было рассмотрено и реализовано на очень ранней стадии. Это решение состоит в том, чтобы сначала преобразовать работу двигателя внутреннего сгорания в электрическую энергию через специальный генератор. Затем эта энергия используется для приведения в действие гребного винта через электродвигатель и, насколько это необходимо, для зарядки аккумуляторов. Таким образом, в этой конфигурации электродвигатель отвечает за привод гребного винта в любое время, независимо от того, доступен ли воздух, так что двигатель внутреннего сгорания также можно использовать или нет.
Среди пионеров этого альтернативного решения была первая подводная лодка ВМС Швеции, HMS Hajen (позже переименован Ub № 1), запущенная в 1904. В то время как его дизайн в целом вдохновлен первой подводной лодки по заказу ВМС США, USS Holland, он отличался от последнего по крайней мере по трем значительным причинам: добавлением перископа, заменой бензинового двигателя на полудизельный (двигатель с горячей лампой, в первую очередь предназначенный для работы на керосине, позже замененный настоящим дизельным двигателем) и разрывая механическую связь между двигателем внутреннего сгорания и воздушным винтом, вместо этого позволяя первому приводить в действие специальный генератор. Таким образом, было сделано три значительных шага к тому, что в конечном итоге стало доминирующей технологией для обычных (то есть неядерных) подводных лодок.
 Одна из первых подводных лодок с дизель-электрической трансмиссией, HMS Hajen, выставлена возле Marinmuseum в Карлскруне.
Одна из первых подводных лодок с дизель-электрической трансмиссией, HMS Hajen, выставлена возле Marinmuseum в Карлскруне. В последующие годы, шведский флот добавили еще семь подводных лодок в трех разных классов ( второй класс, Laxen класса и Braxen класса ) с использованием той же технологии, но двигательную установлены с настоящими дизельными двигателями, а не semidiesels с самого начала. Поскольку к тому времени в основе технологии обычно лежал дизельный двигатель, а не какой-либо другой тип двигателя внутреннего сгорания, в конечном итоге она стала известна как дизель-электрическая трансмиссия.
Как и многие другие ранние подводные лодки, изначально спроектированные в Швеции были довольно небольшими (менее 200 тонн) и, таким образом, использовались только для прибрежных операций. Когда ВМС Швеции захотели добавить более крупные суда, способные действовать дальше от берега, их конструкции были закуплены у зарубежных компаний, которые уже имели необходимый опыт: сначала итальянские ( Fiat - Laurenti ), а затем немецкие ( AG Weser и IvS ). В качестве побочного эффекта от дизель-электрической трансмиссии временно отказались.
Однако дизель-электрическая трансмиссия была немедленно восстановлена, когда Швеция снова начала проектировать свои собственные подводные лодки в середине 1930-х годов. С этого момента он последовательно использовался для всех новых классов шведских подводных лодок, хотя и дополнялся воздушно-независимой силовой установкой (AIP), предоставляемой двигателями Стирлинга, начиная с HMS Näcken в 1988 году.
 Два совершенно разных поколения шведских подводных лодок, но оба с дизель-электрической трансмиссией: HMS Hajen, на вооружении 1905-1922 гг., И HMS Neptun, на вооружении в 1980-1998 гг.
Два совершенно разных поколения шведских подводных лодок, но оба с дизель-электрической трансмиссией: HMS Hajen, на вооружении 1905-1922 гг., И HMS Neptun, на вооружении в 1980-1998 гг. Другим первооткрывателем дизель-электрической трансмиссии был ВМС США, инженерное бюро которого предложило ее использовать в 1928 году. Впоследствии она была опробована на подводных лодках S- класса S-3, S-6 и S-7 перед запуском в производство. с классом Морские свиньи 1930-х годов. С этого момента он продолжал использоваться на большинстве обычных подводных лодок США.
За исключением британских U-класса и некоторых подводных лодок Императорского флота Японии, которые использовали отдельные дизельные генераторы для работы на малой скорости, немногие военно-морские силы, кроме Швеции и США, широко использовали дизель-электрическую трансмиссию до 1945 года. После Второй мировой войны Напротив, он постепенно стал доминирующим двигателем для обычных подводных лодок. Однако его принятие не всегда было быстрым. Примечательно, что ВМФ СССР не использовал дизель-электрическую трансмиссию на своих обычных подводных лодках до 1980 года с классом Paltus.
Если бы дизель-электрическая трансмиссия имела только преимущества и не имела недостатков по сравнению с системой, которая механически соединяет дизельный двигатель с воздушным винтом, она, несомненно, стала бы доминирующей намного раньше. К недостаткам можно отнести следующее:
Причина, по которой дизель-электрическая трансмиссия стала доминирующей альтернативой, несмотря на эти недостатки, конечно же, состоит в том, что она также имеет множество преимуществ, которые в конечном итоге оказались более важными. К достоинствам можно отнести следующее:
 Головная часть мачты для шноркеля немецкой подводной лодки типа XXI U-3503, затопленной у Гетеборга 8 мая 1945 года, но поднятая ВМС Швеции и тщательно изученная с целью улучшения будущих шведских подводных лодок.
Головная часть мачты для шноркеля немецкой подводной лодки типа XXI U-3503, затопленной у Гетеборга 8 мая 1945 года, но поднятая ВМС Швеции и тщательно изученная с целью улучшения будущих шведских подводных лодок. Во время Второй мировой войны немцы экспериментировали с идеей шнорчеля (шноркеля) захваченных голландских подводных лодок, но не видели в них необходимости до самого конца войны. Schnorchel является выдвижная труба, которая обеспечивает подачу воздуха в дизельных двигателях, а погруженные в перископ, позволяя лодке в круиз и перезарядить свои батареи, сохраняя при этом степень скрытности.
Однако, тем более, что впервые реализовано, это оказалось далеко не идеальным решением. Были проблемы с заклиниванием или закрыванием клапана устройства, когда оно погружалось в ненастную погоду. Поскольку система использовала весь прочный корпус в качестве буфера, дизели мгновенно засасывали огромные объемы воздуха из отсеков лодки, и экипаж часто получал болезненные травмы ушей. Скорость была ограничена 8 узлами (15 км / ч), чтобы устройство не сломалось от напряжения. Schnorchel также создал шум, который сделал лодку легче обнаружить с помощью сонара, еще более трудного для бортового гидролокатора для обнаружения сигналов от других судов. Наконец, радар союзников в конечном итоге стал настолько продвинутым, что мачту шнорчеля можно было обнаружить за пределами видимости.
Хотя шноркель делает подводную лодку гораздо менее заметной, она, таким образом, не идеальна. В ясную погоду выхлопы дизельного топлива можно увидеть на поверхности на расстоянии около трех миль, в то время как «перископическое перо» (волна, создаваемая трубкой или перископом, движущимся по воде) видно издалека в спокойных морских условиях. Современный радар также способен обнаруживать трубку в условиях спокойного моря.
 USS U-3008 (бывшая немецкая подводная лодка U-3008) с поднятыми мачтами для снорклинга на военно-морской верфи Портсмута, Киттери, штат Мэн
USS U-3008 (бывшая немецкая подводная лодка U-3008) с поднятыми мачтами для снорклинга на военно-морской верфи Портсмута, Киттери, штат Мэн Проблема дизелей, вызывающих вакуум в подводной лодке, когда головной клапан погружен в воду, все еще существует на более поздних моделях дизельных подводных лодок, но смягчается датчиками отсечки высокого вакуума, которые отключают двигатели, когда вакуум на корабле достигает предварительного уровня. уставка. Современные индукционные мачты для сноркелинга имеют отказоустойчивую конструкцию, использующую сжатый воздух, управляемый простой электрической схемой, чтобы удерживать «головной клапан» открытым против натяжения мощной пружины. Морская вода, омывающая мачту, закорачивает открытые электроды наверху, нарушая управление и закрывая «головной клапан», когда он погружен в воду. Подводные лодки США не использовали трубку до окончания Второй мировой войны.
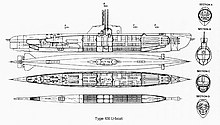
 Немецкая подводная лодка Тип XXI
Немецкая подводная лодка Тип XXI  Американская сверхмощная подводная лодка X-1
Американская сверхмощная подводная лодка X-1 Во время Второй мировой войны немецкие подводные лодки типа XXI (также известные как « Elektroboote ») были первыми подводными лодками, предназначенными для длительной эксплуатации под водой. Первоначально они должны были нести перекись водорода для долговременной быстрой воздушно-независимой тяги, но в конечном итоге вместо этого были построены с очень большими батареями. В конце войны британцы и СССР экспериментировали с двигателями на основе перекиси водорода / керосина (парафина), которые могли работать как на поверхности, так и под водой. Результаты не обнадеживают. Хотя Советский Союз развернул класс подводных лодок с этим типом двигателя ( НАТО под кодовым названием « Квебек »), они были сочтены неудачными.
Соединенные Штаты также используют пероксид водорода в экспериментальной сверхмалой подводной лодки, Х-1. Первоначально он питался от перекиси водорода / дизельного двигателя и аккумуляторной системы до взрыва перекиси водорода 20 мая 1957 года. Позже X-1 был преобразован для использования дизель-электрического привода.
Сегодня несколько военно-морских сил используют воздушно-независимые двигательные установки. Особенно Швеция использует технологию Стирлинга на Готланд -класса и Södermanland -класса подводных лодок. Двигатель Стирлинга нагревается за счет сжигания дизельного топлива жидким кислородом из криогенных резервуаров. Новейшая разработка воздушно-независимой двигательной установки - водородные топливные элементы, впервые использованные на немецкой подводной лодке Тип 212, с девятью ячейками мощностью 34 кВт или двумя элементами по 120 кВт. Топливные элементы также используются в новых испанских подводных лодках класса S-80, хотя топливо хранится в виде этанола, а затем перед использованием преобразуется в водород.
Одна из новых технологий, которая вводится, начиная с одиннадцатой подводной лодки класса « Сёрю» ВМС Японии (JS ryū), представляет собой более современный аккумулятор, литий-ионный аккумулятор. Эти батареи имеют примерно вдвое больший запас электроэнергии по сравнению с традиционными батареями, и за счет замены свинцово-кислотных аккумуляторов в их обычных зонах хранения плюс заполнение большого пространства корпуса, обычно предназначенного для двигателя AIP и топливных баков, многими тоннами литий-ионных аккумуляторов, современные подводные лодки могут фактически вернуться к «чистой» дизель-электрической конфигурации, но при этом иметь дополнительную дальность действия под водой и мощность, обычно присущую подводным лодкам с системой AIP.
 Аккумуляторный отсек на 126 элементов на USS Nautilus, первой атомной подводной лодке
Аккумуляторный отсек на 126 элементов на USS Nautilus, первой атомной подводной лодке Энергия пара была возрождена в 1950-х годах с помощью атомной паровой турбины, приводящей в движение генератор. За счет исключения потребности в атмосферном кислороде время, в течение которого подводная лодка могла оставаться под водой, ограничивалось только запасами еды, поскольку воздух для дыхания рециркулировался, а пресная вода дистиллировалась из морской воды. Что еще более важно, атомная подводная лодка имеет неограниченную дальность полета на максимальной скорости. Это позволяет ему перемещаться от своей оперативной базы в зону боевых действий за гораздо более короткое время и делает его гораздо более сложной целью для большинства противолодочных вооружений. Атомные подводные лодки имеют относительно небольшую батарею и дизельный двигатель / генераторную установку для аварийного использования, если реакторы должны быть остановлены.
Ядерная энергия сейчас используется на всех больших подводных лодках, но из-за высокой стоимости и большого размера ядерных реакторов на более мелких подводных лодках по-прежнему используется дизель-электрическая силовая установка. Соотношение больших и малых подводных лодок зависит от стратегических потребностей. ВМС США, ВМС Франции, а британский королевский флот работают только атомные подводные лодки, что объясняется необходимостью удаленных операций. Другие крупные операторы полагаются на сочетание атомных подводных лодок для стратегических целей и дизель-электрических подводных лодок для обороны. Большинство флотов не имеют атомных подводных лодок из-за ограниченной доступности ядерной энергии и подводных технологий.
Дизель-электрические подводные лодки имеют преимущество перед ядерными аналогами. Атомные подводные лодки создают шум от насосов теплоносителя и турбомашин, необходимых для работы реактора, даже на низких уровнях мощности. Некоторые атомные подводные лодки, такие как американские подводные лодки класса Ohio, могут работать с защищенными насосами охлаждающей жидкости реактора, что делает их более тихими, чем электрические подводные лодки. Обычная подводная лодка, работающая на батареях, почти полностью бесшумна, единственный шум исходит от подшипников вала, гребного винта и шума потока вокруг корпуса, и все это прекращается, когда подводная лодка зависает в середине воды, чтобы слушать, оставляя только шум экипажа. деятельность. Коммерческие подводные лодки обычно полагаются только на батареи, поскольку они работают вместе с плавучей базой.
Несколько серьезных ядерных и радиационных аварий повлекли за собой аварии атомных подводных лодок. Советская подводная лодка К-19 авария реактора в 1961 году привела к смерти 8 людей и более 30 людей были чрезмерно воздействие радиации. Советская подводная лодка К-27 авария реактора в 1968 году в результате 9 погибших и 83 других повреждений. Советская подводная лодка К-431 аварии в 1985 году в результате 10 погибших и 49 других радиационных поражений.
Паровые турбины, работающие на масле, приводили в движение британские подводные лодки класса К, построенные во время Первой мировой войны и позже, чтобы они имели надводную скорость и не отставали от боевого флота. Однако подлодки класса К не имели большого успеха.
К концу 20-го века некоторые подводные лодки, такие как британский Vanguard, начали оснащаться насосными движителями вместо гребных винтов. Хотя они тяжелее, дороже и менее эффективны, чем пропеллер, они значительно тише, что дает важное тактическое преимущество.
 Передний торпедный аппарат HMS Ocelot
Передний торпедный аппарат HMS Ocelot  Торпедный зал Весикко
Торпедный зал Весикко Успех подводной лодки неразрывно связан с разработкой торпеды, изобретенной Робертом Уайтхедом в 1866 году. Его изобретение, по сути, осталось таким же, как и 140 лет назад. Только с самоходными торпедами подводная лодка могла сделать прыжок из новинки в боевое оружие. До совершенства управляемой торпеды для атаки цели требовалось несколько "прямолинейных" торпед. На борту хранилось не более 20-25 торпед, поэтому количество атак было ограничено. Чтобы повысить боевую выносливость, большинство подводных лодок Первой мировой войны функционировали как подводные канонерские лодки, используя свои палубные орудия против невооруженных целей и ныряя, чтобы убежать и поразить вражеские военные корабли. Важность орудий способствовало развитию неудачном подводного крейсера, такие как французский Surcouf а Королевского флота «s X1 и M-класса подводных лодок. С появлением самолетов противолодочной обороны (ПЛО) орудия стали больше использоваться для защиты, чем для нападения. Более практичным методом повышения боевой выносливости был внешний торпедный аппарат, заряжаемый только в левом.
Способность подводных лодок незаметно приближаться к гаваням противника привела к их использованию в качестве минных заградителей. Специально для этого строились подводные лодки-заградители времен Первой и Второй мировых войн. Современные подводные мины, такие как британские Mark 5 Stonefish и Mark 6 Sea Urchin, могут быть выведены из торпедных аппаратов подводных лодок.
После Второй мировой войны США и СССР экспериментировали с крылатыми ракетами, запускаемыми с подводных лодок, такими как SSM-N-8 Regulus и P-5 Pyatyorka. Такие ракеты требовали от подводной лодки всплытия для запуска ракет. Они были предшественниками современных крылатых ракет запускаемых с подводных лодок, которые могут быть запущены из торпедных аппаратов подводных лодок, к примеру, США BGM-109 Tomahawk и России RPK-2 Viyuga и версии поверхности к поверхности противокорабельных ракеты, такие как Exocet и Harpoon, закрытые для запуска с подводных лодок. Баллистические ракеты также могут запускаться из торпедных аппаратов подводных лодок, например, ракет, таких как противолодочные SUBROC. При таком ограниченном внутреннем объеме и желании нести более тяжелые боевые нагрузки идея внешней пусковой трубы была возрождена, обычно для герметизированных ракет, причем такие трубы размещались между внутренним давлением и внешним обтекаемым корпусом.
Стратегическая задача SSM-N-8 и P-5 была взята на себя баллистическими ракетами подводных лодок, начиная с ракеты Polaris ВМС США, а затем ракет Poseidon и Trident.
Германия работает над ракетой малой дальности IDAS с торпедным аппаратом, которая может быть использована против противолодочных вертолетов, а также надводных кораблей и береговых целей.
Подводная лодка может иметь множество датчиков, в зависимости от ее задач. Современные военные подводные лодки почти полностью полагаются на набор пассивных и активных гидролокаторов для обнаружения целей. Активный гидролокатор полагается на звуковой сигнал для генерации эхо-сигналов, позволяющих выявить объекты вокруг подводной лодки. Активные системы используются редко, так как это выявляет присутствие субмарины. Пассивный гидролокатор - это набор чувствительных гидрофонов, установленных в корпусе или буксируемых в составе буксируемой группы, обычно в нескольких сотнях футов позади субмарины. Буксируемая система является основой систем обнаружения подводных лодок НАТО, поскольку она снижает шум потока, слышимый операторами. Гидролокатор, установленный на корпусе, используется в дополнение к буксируемой группе, поскольку буксируемая группа не может работать на небольшой глубине и во время маневрирования. Кроме того, у гидролокатора есть слепая зона "сквозь" подводную лодку, поэтому для устранения этой проблемы работает система как спереди, так и сзади. Поскольку буксируемая группа движется позади и ниже подводной лодки, она также позволяет подводной лодке иметь систему как выше, так и ниже термоклина на нужной глубине; звук, проходящий через термоклин, искажается, что снижает дальность обнаружения.
Подводные лодки также оснащены радиолокационным оборудованием для обнаружения надводных кораблей и самолетов. Капитаны подводных лодок с большей вероятностью будут использовать радиолокационные средства обнаружения, чем активные радиолокаторы, для обнаружения целей, поскольку радар может быть обнаружен далеко за пределами своей собственной дальности возврата, обнаруживая подводную лодку. Перископы используются редко, за исключением определения местоположения и проверки личности контакта.
Гражданские подводные лодки, такие как DSV Alvin или российские подводные аппараты « Мир», для навигации полагаются на небольшие активные гидролокаторы и смотровые окна. Человеческий глаз не может обнаруживать солнечный свет под водой на глубине около 91 м, поэтому для освещения области просмотра используется свет высокой интенсивности.
 Более крупный перископ поиска и меньший, менее заметный перископ атаки на HMS Ocelot.
Более крупный перископ поиска и меньший, менее заметный перископ атаки на HMS Ocelot. Ранние подводные лодки имели немного средств навигации, но современные подводные лодки имеют множество навигационных систем. Современные военные подводные лодки используют инерциальную систему наведения для навигации в подводном положении, но ошибка дрейфа неизбежно увеличивается с течением времени. Чтобы противостоять этому, экипаж иногда использует глобальную систему позиционирования для определения точного местоположения. Перископа -a выдвижная труба с призменной системой, которая обеспечивает вид на поверхности, используется только изредка в современных подводных лодках, так как дальность видимости коротка. Вирджиния -класса и проницательная -класс субмарина используют фотоник мачты, а не корпуса проникающих оптические перископов. Эти мачты по-прежнему должны быть развернуты над поверхностью и использовать электронные датчики для видимого света, инфракрасного излучения, лазерного дальномера и электромагнитного наблюдения. Одним из преимуществ подъема мачты над поверхностью является то, что, пока мачта находится над водой, вся подводная лодка все еще находится под водой, и ее гораздо труднее обнаружить визуально или с помощью радара.
Военные подводные лодки используют несколько систем для связи с удаленными командными центрами или другими кораблями. Один из них - это радиостанция VLF (очень низкочастотная), которая может достигать подводной лодки либо на поверхности, либо на довольно небольшой глубине, обычно менее 250 футов (76 м). ELF (чрезвычайно низкая частота) может достигать подводной лодки на больших глубинах, но имеет очень узкую полосу пропускания и обычно используется для вызова подводной лодки на меньшую глубину, где могут достигать сигналы VLF. Подводная лодка также имеет возможность спустить длинную плавучую проволочную антенну на меньшую глубину, что позволяет осуществлять передачу ОНЧ с глубоко погруженной лодки.
Выдвигая радиомачту, подводная лодка также может использовать метод « пакетной передачи ». Пакетная передача занимает всего доли секунды, сводя к минимуму риск обнаружения подводной лодки.
Для связи с другими подводными лодками используется система, известная как Гертруда. Гертруда - это, по сути, сонарный телефон. Голосовая связь с одной подводной лодки передается маломощными динамиками в воду, где она обнаруживается пассивными сонарами на принимающей подводной лодке. Дальность действия этой системы, вероятно, очень мала, и при ее использовании в воду излучается звук, который может быть услышан противником.
Гражданские подводные лодки могут использовать аналогичные, хотя и менее мощные системы для связи с кораблями поддержки или другими подводными аппаратами в этом районе.
Благодаря ядерной энергетике или воздушно-независимой силовой установке подводные лодки могут оставаться под водой в течение нескольких месяцев. Обычные дизельные подводные лодки должны периодически всплывать на поверхность или работать с трубкой для подзарядки своих батарей. Большинство современных военных подводных лодок генерируют кислород для дыхания путем электролиза воды (с помощью устройства, называемого « электролитический кислородный генератор »). Оборудование для контроля атмосферы включает скруббер CO 2, в котором используется аминовый абсорбент для удаления газа из воздуха и его диффузии в отходы, перекачиваемые за борт. Также используется машина, которая использует катализатор для преобразования окиси углерода в двуокись углерода (удаляемую скруббером CO 2) и связывает водород, полученный из аккумуляторной батареи корабля, с кислородом в атмосфере для производства воды. Система мониторинга атмосферы отбирает воздух из разных зон корабля на предмет азота, кислорода, водорода, хладагентов R-12 и R-114, двуокиси углерода, окиси углерода и других газов. Ядовитые газы удаляются, а кислород пополняется за счет использования кислородного баллона, расположенного в основном балластном баке. Некоторые более тяжелые подводные лодки имеют две станции отбора кислорода (носовую и кормовую). Кислород в воздухе иногда поддерживается на несколько процентов ниже атмосферной концентрации, чтобы снизить риск возгорания.
Пресная вода производится испарителем или установкой обратного осмоса. В первую очередь пресная вода используется для подачи питательной воды для реактора и паровых энергетических установок. Он также доступен для душа, раковины, приготовления пищи и очистки, как только будут удовлетворены потребности силовой установки. Морская вода используется для смыва туалетов, а образовавшаяся « черная вода » хранится в санитарном баке до тех пор, пока она не будет выброшена за борт сжатым воздухом или откачана за борт с помощью специального санитарного насоса. Система Blackwater разряда трудно работать, и немецкий Тип VIIC лодка U-1206 был потерян с потерями из - за человеческой ошибки при использовании этой системы. Вода из душевых и раковин хранится отдельно в цистернах « сточных вод » и сбрасывается за борт с помощью дренажных насосов.
Мусор на современных больших подводных лодках обычно утилизируется с помощью трубы, называемой устройством для удаления мусора (TDU), где он уплотняется в оцинкованную стальную банку. Внизу TDU находится большой шаровой кран. На верхнюю часть шарового клапана устанавливается ледяная пробка, а банки - на ледяную пробку. Верхняя заслонка закрывается, TDU затопляется и уравновешивается давлением морской воды, шаровой кран открывается, и банки выпадают при помощи грузов для металлолома в контейнерах. TDU также промывается морской водой, чтобы убедиться, что он полностью опорожнен и шаровой кран не закрыт, прежде чем закрыть клапан.
 Интерьер британской подводной лодки Е-класса. Офицер наблюдает за операциями по погружению, c. 1914–1918 гг.
Интерьер британской подводной лодки Е-класса. Офицер наблюдает за операциями по погружению, c. 1914–1918 гг. Типичная атомная подводная лодка имеет экипаж более 80 человек; на обычных лодках их обычно меньше 40. Условия на подводной лодке могут быть тяжелыми, потому что члены экипажа должны работать изолированно в течение длительных периодов времени, без контактов с семьей. Подводные лодки обычно поддерживают радиомолчание, чтобы избежать обнаружения. Управлять подводной лодкой опасно даже в мирное время, и многие подводные лодки были потеряны в результате аварий.
 Гардемарины учатся пилотировать военный корабль США " Западная Вирджиния".
Гардемарины учатся пилотировать военный корабль США " Западная Вирджиния". Большинство военно-морских сил запрещали женщинам служить на подводных лодках, даже после того, как им было разрешено служить на надводных кораблях. Королевский Норвежский флот стал первым военно - морского флота, чтобы женщины на своих подводников в 1985 году Датской ВМС позволило женских подводников в 1988 году Другие последовали его примеру в том числе ВМС Швеции (1989), ВМС Австралии (1998 г.), испанский флот (1999 г.), ВМС Германии (2001 г.) и ВМС Канады (2002 г.). В 1995 году Сольвейг Крей из Королевского военно-морского флота Норвегии стала первой женщиной-офицером, взявшей на себя командование военной подводной лодкой HNoMS Kobben.
8 декабря 2011 года министр обороны Великобритании Филип Хаммонд объявил, что запрет Великобритании на использование женщин на подводных лодках должен быть снят с 2013 года. Ранее высказывались опасения, что женщины подвергаются большему риску из-за накопления углекислого газа на подводной лодке. Но исследование не показало медицинских причин для исключения женщин, хотя беременные женщины все равно будут исключены. Подобные опасности для беременной женщины и ее плода не позволяли женщинам нести службу на подводных лодках в Швеции в 1983 году, когда для них были предоставлены все другие должности в шведском флоте. Сегодня беременным женщинам по-прежнему не разрешают служить на подводных лодках в Швеции. Однако политики посчитали, что общий запрет был дискриминационным, и потребовали, чтобы женщины были судимы по их личным достоинствам, а также оценивались их пригодность и сравнивались с другими кандидатами. Далее они отметили, что женщина, отвечающая таким высоким требованиям, вряд ли забеременеет. В мае 2014 года три женщины стали первыми женщинами-подводниками РН.
Женщины служили на надводных кораблях ВМС США с 1993 года, а в 2011–2012 годах впервые начали службу на подводных лодках. До настоящее время ВМС не разрешено только три исключения женщин, находящихся на борту военных субмарин: женщина гражданских техников в течение нескольких дней в лучшем случае, женщины гардемаринов на ночь во время летних тренировок для Военно - морского флота ROTC и Военно - морской академии, а также членов семьи в течение одного дня зависимого круизы. В 2009 году высокопоставленные должностные лица, в том числе тогдашний секретарь ВМФ Рэй Мабус, Объединенный начальник штаба адмирал Майкл Маллен и начальник военно-морских операций адмирал Гэри Роугхед, начали процесс поиска способа задействовать женщин на подводных лодках. В 2010 году ВМС США отменили свою политику запрета женщин на подводные лодки.
Военно-морские силы США и Великобритании используют атомные подводные лодки, которые находятся в эксплуатации на период от шести месяцев или дольше. Другие военно-морские силы, которые разрешают женщинам служить на подводных лодках, используют подводные лодки с обычными двигателями, которые развертываются на гораздо более короткие периоды времени - обычно всего на несколько месяцев. До изменений, внесенных США, ни одна страна, использующая атомные подводные лодки, не разрешала женщинам служить на борту.
В 2011 году первый класс женщин-офицеров-подводников окончили Базовый курс для офицеров подводных лодок военно-морской подводной школы (SOBC) на военно-морской базе подводных лодок в Нью-Лондоне. Кроме того, более старшие и опытные женщины-офицеры снабжения по специальности «Надводная война» также посетили SOBC, приступив к работе на подводных лодках с баллистическими ракетами (ПЛАРБ) и управляемыми ракетами (ПЛАРБ) вместе с новыми линейными офицерами женского пола, начиная с конца 2011 года. В 2011 году несколько женщин были назначены на подводную лодку с баллистическими ракетами класса Огайо USS Wyoming. 15 октября 2013 года ВМС США объявили, что к январю 2015 года в составе экипажей двух меньших ударных подводных лодок класса Вирджиния, USS Virginia и USS Minnesota, будут женщины.
В 2020 году Национальная военно-морская академия подводных лодок Японии приняла первого кандидата-женщину.
 Спасательный костюм с подводной лодки
Спасательный костюм с подводной лодки В аварийной ситуации подводные лодки могут передавать сигнал другим кораблям. Экипаж может использовать подводное оборудование для эвакуации, чтобы покинуть подводную лодку. Экипаж может избежать травмы легких из-за чрезмерного расширения воздуха в легких из-за изменения давления, известного как легочная баротравма, путем выдоха во время всплытия. После побега из находящейся под давлением подводной лодки экипаж рискует заболеть декомпрессионной болезнью. Альтернативным средством эвакуации является спасательная машина для глубокого погружения, которая может состыковаться с выведенной из строя подводной лодкой.
Общая история
Культура
Подводные лодки до 1914 г.
1900 г. / Русско-японская война 1904–1905 гг.
Вторая Мировая Война
Холодная война