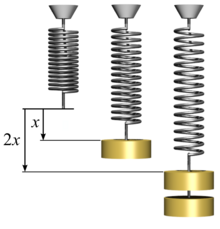
Закон Гука: сила пропорциональна протяженности
 Трубки Бурдона
Трубки Бурдона основаны на законе Гука. Сила, создаваемая
давлением газа внутри свернутой вверх металлической трубки, раскручивает ее на величину, пропорциональную давлению.
 Балансир
Балансир в основе многих механических часов и часов зависит от закона Гука. Поскольку крутящий момент, создаваемый витой пружиной, пропорционален углу поворота колеса, его колебания имеют почти постоянный период.
Закон Гука - это физический закон, который гласит, что сила ( F), необходимая для растяжения или сжатия пружины на некоторое расстояние ( x), линейно масштабируется по отношению к этому расстоянию, то есть F s = kx, где k - постоянный коэффициент характеристика пружины (т.е. ее жесткость ), а x мала по сравнению с общей возможной деформацией пружины. Закон назван в честь британского физика 17 века Роберта Гука. Он впервые изложил закон в 1676 году в виде латинской анаграммы. Он опубликовал решение своей анаграммы в 1678 году как: ut tensio, sic vis («как протяженность, поэтому сила» или «протяженность пропорциональна силе»). Гук утверждает в работе 1678 года, что он знал о законе с 1660 года.
Уравнение Гука справедливо (до некоторой степени) во многих других ситуациях, когда упругое тело деформируется, например, когда ветер дует на высокое здание, а музыкант дергает за струну гитары. Упругое тело или материал, для которого можно принять это уравнение, называется линейно-упругим или гуковским.
Закон Гука - это только линейное приближение первого порядка к реальной реакции пружин и других упругих тел на приложенные силы. Он должен в конечном итоге выйти из строя, как только силы превысят некоторый предел, поскольку никакой материал не может быть сжат сверх определенного минимального размера или растянут сверх максимального размера без некоторой остаточной деформации или изменения состояния. Многие материалы будут заметно отклоняться от закона Гука задолго до того, как будут достигнуты эти пределы упругости.
С другой стороны, закон Гука является точным приближением для большинства твердых тел, если силы и деформации достаточно малы. По этой причине закон Гука широко используется во всех отраслях науки и техники и является основой многих дисциплин, таких как сейсмология, молекулярная механика и акустика. Это также фундаментальный принцип, лежащий в весеннем масштабе, с манометром, на гальванометр, и балансиром на механические часы.
Современная теория упругости обобщает закон Гука, гласящий, что деформация (деформация) упругого объекта или материала пропорциональна приложенному к нему напряжению. Однако, поскольку общие напряжения и деформации могут иметь несколько независимых компонентов, «коэффициент пропорциональности» может больше не быть просто одним действительным числом, а скорее линейной картой ( тензором ), которая может быть представлена матрицей действительных чисел.
В этой общей форме закон Гука позволяет вывести связь между деформацией и напряжением для сложных объектов с точки зрения внутренних свойств материалов, из которых он сделан. Например, можно сделать вывод, что однородный стержень с однородным поперечным сечением будет вести себя как простая пружина при растяжении, с жесткостью k, прямо пропорциональной его площади поперечного сечения и обратно пропорциональной его длине.
СОДЕРЖАНИЕ
- 1 Формальное определение
- 1.1 Для линейных пружин
- 1.2 Общие «скалярные» пружины
- 1.3 Векторная формулировка
- 1.4 Общая тензорная форма
- 1.5 Закон Гука для непрерывных медиа
- 2 Аналогичные законы
- 3 единицы измерения
- 4 Общее применение к эластичным материалам
- 5 Производные формулы
- 5.1 Растягивающее напряжение однородного стержня
- 5.2 Энергия весны
- 5.3 Константы расслабленной силы (обобщенные константы податливости)
- 5.4 Гармонический осциллятор
- 5.5 Вращение в свободном от гравитации пространстве
- 6 Линейная теория упругости для сплошных сред
- 6.1 Изотропные материалы
- 6.1.1 Плоское напряжение
- 6.1.2 Плоская деформация
- 6.2 Анизотропные материалы
- 6.2.1 Матричное представление (тензор жесткости)
- 6.2.2 Изменение системы координат
- 6.2.3 Ортотропные материалы
- 6.2.4 Трансверсально изотропные материалы
- 6.2.5 Универсальный индекс упругой анизотропии
- 7 Термодинамические основы
- 8 См. Также
- 9 Примечания
- 10 Ссылки
- 11 Внешние ссылки
Формальное определение
Для линейных пружин
Рассмотрим простую спиральную пружину, один конец которой прикреплен к какому-либо неподвижному объекту, а свободный конец тянется силой, величина которой равна F s. Предположим, что пружина достигла состояния равновесия, при котором ее длина больше не меняется. Пусть x будет величиной, на которую свободный конец пружины был смещен из своего «расслабленного» положения (когда он не растягивается). Закон Гука гласит, что

или, что то же самое,

где k - положительное действительное число, характерное для пружины. Более того, та же формула верна при сжатии пружины, причем в этом случае значения F s и x отрицательны. Согласно этой формуле, то график приложенной силы Р ы в зависимости от смещения х будет прямая линия, проходящая через происхождения, чей наклон является к.
Закон Гука для пружины иногда, но редко, утверждается в соответствии с соглашением, что F s - это возвращающая сила, прилагаемая пружиной к тому, что тянет за ее свободный конец. В этом случае уравнение принимает вид

так как направление возвращающей силы противоположно направлению смещения.
Общие «скалярные» пружины
Закон Гука о пружине обычно применяется к любому упругому объекту любой сложности, если и деформация, и напряжение могут быть выражены одним числом, которое может быть как положительным, так и отрицательным.
Например, когда резиновый блок, прикрепленный к двум параллельным пластинам, деформируется путем сдвига, а не растяжения или сжатия, сила сдвига F s и поперечное смещение пластин x подчиняются закону Гука (для достаточно малых деформаций).
Закон Гука также применяется, когда прямая стальная балка или бетонная балка (например, используемая в зданиях), опирающаяся на оба конца, сгибается грузом F, помещенным в некоторой промежуточной точке. Смещение x в данном случае представляет собой отклонение балки, измеренное в поперечном направлении, относительно ее ненагруженной формы.
Этот закон также применяется, когда натянутую стальную проволоку скручивают, потянув за рычаг, прикрепленный к одному концу. В этом случае напряжение F s можно принять как силу, приложенную к рычагу, а x - как расстояние, пройденное им по круговой траектории. Или, что то же самое, можно позволить F s быть крутящим моментом, прилагаемым рычагом к концу провода, а x - углом, на который этот конец поворачивается. В любом случае F s пропорционален x (хотя константа k в каждом случае разная).
Векторная формулировка
В случае винтовой пружины, которая растягивается или сжимается вдоль своей оси, приложенная (или восстанавливающая) сила и результирующее удлинение или сжатие имеют одинаковое направление (которое является направлением указанной оси). Следовательно, если F s и x определены как векторы, уравнение Гука все еще остается в силе и говорит, что вектор силы - это вектор удлинения, умноженный на фиксированный скаляр.
Общая тензорная форма
Некоторые упругие тела деформируются в одном направлении под действием силы в другом направлении. Одним из примеров является горизонтальная деревянная балка с неквадратным прямоугольным поперечным сечением, которая изгибается под действием поперечной нагрузки, которая не является ни вертикальной, ни горизонтальной. В таких случаях величина смещения x будет пропорциональна величине силы F s, пока направление последней остается тем же самым (и ее значение не слишком велико); так что скалярная версия закона Гука F s = −kx будет верна. Однако векторы силы и смещения не будут скалярно кратными друг другу, поскольку они имеют разные направления. Причем соотношение k между их величинами будет зависеть от направления вектора F s.
Тем не менее, в таких случаях часто существует фиксированная линейная зависимость между векторами силы и деформации, если они достаточно малы. А именно, существует функция κ из векторов в векторы, такая что F = κ ( X) и κ ( α X 1 + β X 2) = α κ ( X 1) + β κ ( X 2) для любых действительных чисел α, β и любые векторы смещения X 1, X 2. Такая функция называется тензором (второго порядка).
По отношению к произвольной декартовой системе координат векторы силы и смещения могут быть представлены матрицами действительных чисел 3 × 1. Тогда тензор κ, соединяющий их, может быть представлен матрицей κ 3 × 3 вещественных коэффициентов, которая при умножении на вектор смещения дает вектор силы:

То есть,

для i = 1, 2, 3. Следовательно, можно сказать, что закон Гука F = κX выполняется также, когда X и F являются векторами с переменными направлениями, за исключением того, что жесткость объекта является тензором κ, а не единственным действительным числом k.
Закон Гука для непрерывных медиа
Основная статья:
линейная эластичность 
(а) Схема полимерной нанопружины. Радиус катушки R, шаг P, длина пружины L и количество витков N составляют 2,5 мкм, 2,0 мкм, 13 мкм и 4 соответственно. Электронные микрофотографии нанопружины перед нагрузкой (be), растянутой (f), сжатой (g), изогнутой (h) и восстановленной (i). Все масштабные линейки имеют размер 2 мкм. Пружина следовала линейному отклику на приложенную силу, демонстрируя справедливость закона Гука в наномасштабе.
Напряжения и деформации материала внутри непрерывного эластичного материала (такого как резиновый блок, стенка котла или стальной стержень) связаны линейной зависимостью, которая математически подобна закону пружины Гука и часто упоминается под этим именем.
Однако деформированное состояние в твердой среде около некоторой точки нельзя описать одним вектором. Один и тот же кусок материала, каким бы маленьким он ни был, можно сжимать, растягивать и разрезать одновременно в разных направлениях. Точно так же напряжения в этом участке могут быть одновременно толкающими, растягивающими и сдвигающими.
Чтобы уловить эту сложность, соответствующее состояние среды вокруг точки должно быть представлено тензорами второго порядка, тензором деформации ε (вместо смещения X) и тензором напряжений σ (заменяющим восстанавливающую силу F). Тогда аналог закона пружины Гука для сплошных сред имеет вид

где c - тензор четвертого порядка (то есть линейное отображение между тензорами второго порядка), обычно называемый тензором жесткости или тензором упругости. Его также можно записать как

где тензор s, называемый тензором податливости, представляет собой инверсию указанного линейного отображения.
В декартовой системе координат тензоры напряжений и деформаций могут быть представлены матрицами 3 × 3

Являясь линейным отображением между девятью числами σ ij и девятью числами ε kl, тензор жесткости c представлен матрицей из 3 × 3 × 3 × 3 = 81 действительных чисел c ijkl. Тогда закон Гука гласит, что

где i, j = 1,2,3.
Все три тензора обычно меняются от точки к точке внутри среды, а также могут меняться со временем. Тензор деформации ε просто определяет смещение частиц среды в окрестности точки, а тензор напряжений σ задает силы, которые соседние участки среды действуют друг на друга. Следовательно, они не зависят от состава и физического состояния материала. С другой стороны, тензор жесткости c является свойством материала и часто зависит от переменных физического состояния, таких как температура, давление и микроструктура.
Из-за присущей симметрии σ, ε и c только 21 упругий коэффициент последнего является независимым. Это число может быть дополнительно уменьшено за счет симметрии материала: 9 для ромбического кристалла, 5 для гексагональной структуры и 3 для кубической симметрии. Для изотропных сред (которые имеют одинаковые физические свойства в любом направлении) c может быть уменьшено только до двух независимых чисел, объемного модуля K и модуля сдвига G, которые количественно определяют сопротивление материала изменениям объема и сдвиговым деформациям, соответственно..
Аналогичные законы
Так как закон Гука представляет собой простой пропорциональности между двумя величинами, ее формулы и последствия математически аналогичны многих других физических законов, таких, как те, описывающие движение жидкости, или поляризацию о наличии диэлектрика с помощью электрического поля.
В частности, тензорное уравнение σ = cε, связывающее упругие напряжения с деформациями, полностью аналогично уравнению τ = με̇, связывающему тензор вязких напряжений τ и тензор скорости деформации ε̇ в потоках вязких жидкостей; хотя первое относится к статическим напряжениям (связанным с величиной деформации), а второе относится к динамическим напряжениям (связанным со скоростью деформации).
Меры измерения
В единицах СИ смещения измеряются в метрах (м), а силы - в ньютонах (Н или кг м / с 2). Следовательно, жесткость пружины k и каждый элемент тензора κ измеряются в ньютонах на метр (Н / м) или килограммах на секунду в квадрате (кг / с 2).
Для сплошных сред каждый элемент тензора напряжений σ представляет собой силу, деленную на площадь; поэтому оно измеряется в единицах давления, а именно паскаль (Па или Н / м 2 или кг / (м с 2). Элементами тензора деформации ε являются безразмерными (смещениями, разделенных на расстояниях). Таким образом, записи из с IJKL также выражены в единицах давления.
Общее применение к эластичным материалам
 Кривая "напряжение-деформация"
Кривая "напряжение-деформация" для низкоуглеродистой стали, показывающая взаимосвязь между
напряжением (силой на единицу площади) и
деформацией (результирующим сжатием / растяжением, известным как деформация). Закон Гука действителен только для участка кривой между началом координат и пределом текучести (2).
Объекты, которые быстро восстанавливают свою первоначальную форму после деформации под действием силы, когда молекулы или атомы их материала возвращаются в исходное состояние устойчивого равновесия, часто подчиняются закону Гука.
Закон Гука справедлив только для некоторых материалов при определенных условиях нагрузки. Сталь демонстрирует линейно-упругие свойства в большинстве инженерных приложений; Закон Гука справедлив для него во всем диапазоне его упругости (т. Е. Для напряжений ниже предела текучести ). Для некоторых других материалов, таких как алюминий, закон Гука действителен только для части диапазона упругости. Для этих материалов определено пропорциональное предельное напряжение, ниже которого ошибки, связанные с линейным приближением, незначительны.
Каучук обычно считается «негуковским» материалом, потому что его эластичность зависит от напряжения и чувствительна к температуре и скорости нагружения.
Обобщения закона Гука на случай больших деформаций обеспечиваются моделями неогуковских тел и тел Муни – Ривлина.
Производные формулы
Напряжение растяжения однородного стержня
Стержень из любого эластичного материала можно рассматривать как линейную пружину. Стержень имеет длину L и площадь поперечного сечения A. Его растягивающее напряжение σ линейно пропорционально его относительному растяжению или деформации ε на модуль упругости E:
-
 .
.
Модуль упругости часто можно считать постоянным. По очереди,

(то есть дробное изменение длины), и поскольку

следует, что:

Изменение длины можно выразить как

Весенняя энергия
Потенциальная энергия U el ( x), запасенная в пружине, определяется выражением

что происходит за счет суммирования энергии, необходимой для постепенного сжатия пружины. То есть интеграл силы от смещения. Поскольку внешняя сила имеет то же общее направление, что и смещение, потенциальная энергия пружины всегда неотрицательна.
Этот потенциал U el можно представить в виде параболы на плоскости Ux, такой что U el ( x) = 1/2кх 2. Когда пружина растягивается в положительном направленииоси x, потенциальная энергия увеличивается параболически (то же самое происходит при сжатии пружины). Поскольку изменение потенциальной энергии изменяется с постоянной скоростью:

Обратите внимание, что изменение изменения U постоянно, даже когда смещение и ускорение равны нулю.
Константы расслабленной силы (обобщенные константы податливости)
Релаксационные силовые постоянные (обратные обобщенным константам податливости) однозначно определены для молекулярных систем, в отличие от обычных «жестких» силовых констант, и, таким образом, их использование позволяет проводить значимые корреляции между силовыми полями, рассчитанными для реагентов, переходных состояний и продукты химической реакции. Подобно тому, как потенциальная энергия может быть записана в виде квадратичной формы во внутренних координатах, ее также можно записать в терминах обобщенных сил. Результирующие коэффициенты называются константами податливости. Существует прямой метод расчета константы податливости для любой внутренней координаты молекулы без необходимости проведения анализа в нормальном режиме. Пригодность ослабленных силовых констант (констант обратной податливости) в качестве дескрипторов прочности ковалентной связи была продемонстрирована еще в 1980 году. Недавно была продемонстрирована пригодность в качестве дескрипторов прочности нековалентной связи.
Гармонический осциллятор
Смотрите также:
гармонический осциллятор 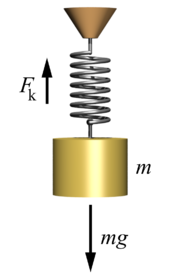
Масса, подвешенная на пружине, - классический пример гармонического осциллятора.
Масса m, прикрепленная к концу пружины, является классическим примером гармонического осциллятора. Если слегка потянуть за груз и затем отпустить его, система будет приведена в синусоидальное колебательное движение около положения равновесия. Если пружина подчиняется закону Гука и можно пренебречь трением и массой пружины, амплитуда колебаний останется постоянной; а его частота f не будет зависеть от его амплитуды и определяется только массой и жесткостью пружины:

Это явление сделало возможным создание точных механических часов, которые можно было носить на кораблях и в карманах людей.
Вращение в свободном от гравитации пространстве
Если бы масса m была прикреплена к пружине с постоянной силы k и вращалась бы в свободном пространстве, натяжение пружины ( F t) обеспечило бы требуемую центростремительную силу ( F c):

Поскольку F t = F c и x = r, то:

Учитывая, что ω = 2π f, это приводит к тому же частотному уравнению, что и выше:
Линейная теория упругости для сплошных сред
- Примечание: ниже используется соглашение Эйнштейна о суммировании повторяющихся индексов.
Изотропные материалы
Для аналогичной разработки для вязких жидкостей см.
Вязкость.
Изотропные материалы характеризуются свойствами, которые не зависят от направления в пространстве. Следовательно, физические уравнения, включающие изотропные материалы, не должны зависеть от системы координат, выбранной для их представления. Тензор деформации - симметричный тензор. Поскольку след любого тензора не зависит от какой-либо системы координат, наиболее полное безкоординатное разложение симметричного тензора состоит в том, чтобы представить его как сумму постоянного тензора и бесследового симметричного тензора. Таким образом, в индексной записи :

где δ ij - символ Кронекера. В прямой тензорной записи:

где I - тождественный тензор второго порядка.
Первый член справа - это постоянный тензор, также известный как тензор объемной деформации, а второй член - бесследный симметричный тензор, также известный как девиаторный тензор деформации или тензор сдвига.
Самая общая форма закона Гука для изотропных материалов теперь может быть записана как линейная комбинация этих двух тензоров:

где K - объемный модуль, а G - модуль сдвига.
Используя соотношения между модулями упругости, эти уравнения также можно выразить различными другими способами. Распространенная форма закона Гука для изотропных материалов, выраженная в прямых тензорных обозначениях, - это

где λ = K -2/3G = C 1111 - 2 с 1212 и μ = G = C 1212 являются постоянной Ламой, я это единичный тензор второго ранга, и я это симметричная часть тензора идентичности четвертого ранга. В индексном обозначении:

Обратное соотношение:

Следовательно, тензор податливости в соотношении ε = s : σ равен

В терминах модуля Юнга и коэффициента Пуассона закон Гука для изотропных материалов может быть выражен как

Это форма, в которой деформация выражается в терминах тензора напряжений в технике. Выражение в развернутом виде:

где E - модуль Юнга, а ν - коэффициент Пуассона. (См. Трехмерная эластичность ).
| Вывод закона Гука в трех измерениях |
| Трехмерная форма закона Гука может быть получена с использованием коэффициента Пуассона и одномерной формы закона Гука следующим образом. Рассмотрим соотношение деформации и напряжения как суперпозицию двух эффектов: растяжения в направлении нагрузки (1) и сжатия (вызванного нагрузкой) в перпендикулярных направлениях (2 и 3), 
где ν - коэффициент Пуассона, а E - модуль Юнга. Получаем аналогичные уравнения для нагрузок в направлениях 2 и 3, 
а также 
Суммируя три случая вместе ( ε i = ε i ′ + ε i ″ + ε i ‴), получаем 
или добавлением и вычитанием одного νσ 
и далее, решая σ 1 
Расчет суммы 
и подставив его в уравнение, решенное для σ 1, дает 
где μ и λ - параметры Ламе. Подобное рассмотрение направлений 2 и 3 дает закон Гука в трех измерениях. |
В матричной форме закон Гука для изотропных материалов можно записать как

где γ ij = 2 ε ij - инженерная деформация сдвига. Обратное соотношение можно записать как

который можно упростить благодаря константам Ламе:

В векторных обозначениях это становится

где I - тождественный тензор.
Плоское напряжение
В условиях плоского напряжения σ 31 = σ 13 = σ 32 = σ 23 = σ 33 = 0. В этом случае закон Гука принимает вид

В векторных обозначениях это становится

Обратное соотношение обычно записывают в приведенной форме

Деформация самолета
В условиях плоской деформации ε 31 = ε 13 = ε 32 = ε 23 = ε 33 = 0. В этом случае закон Гука принимает вид

Анизотропные материалы
Из симметрии тензора напряжений Коши ( σ ij = σ ji) и обобщенных законов Гука ( σ ij = c ijkl ε kl) следует, что c ijkl = c jikl. Точно так же из симметрии тензора бесконечно малых деформаций следует, что c ijkl = c ijlk. Эти симметрии называются минорными симметриями тензора жесткости c. Это уменьшает количество упругих постоянных с 81 до 36.
Если, кроме того, поскольку градиент смещения и напряжение Коши являются рабочими сопряженными, соотношение напряжение-деформация может быть получено из функционала плотности энергии деформации ( U), то

Из произвольности порядка дифференцирования следует, что c ijkl = c klij. Они называются основными симметриями тензора жесткости. Это уменьшает количество упругих постоянных с 36 до 21. Большая и второстепенная симметрии указывают на то, что тензор жесткости имеет только 21 независимый компонент.
Матричное представление (тензор жесткости)
Часто бывает полезно выразить анизотропную форму закона Гука в матричной нотации, также называемой нотацией Фойгта. Для этого мы используем симметрию тензоров напряжений и деформаций и выражаем их как шестимерные векторы в ортонормированной системе координат ( e 1, e 2, e 3) как
![{\ displaystyle [{\ boldsymbol {\ sigma}}] \, = \, {\ begin {bmatrix} \ sigma _ {11} \\\ sigma _ {22} \\\ sigma _ {33} \\\ sigma _ {23} \\\ sigma _ {13} \\\ sigma _ {12} \ end {bmatrix}} \, \ Equiv \, {\ begin {bmatrix} \ sigma _ {1} \\\ sigma _ { 2} \\\ sigma _ {3} \\\ sigma _ {4} \\\ sigma _ {5} \\\ sigma _ {6} \ end {bmatrix}} \,; \ qquad [{\ boldsymbol { \ varepsilon}}] \, = \, {\ begin {bmatrix} \ varepsilon _ {11} \\\ varepsilon _ {22} \\\ varepsilon _ {33} \\ 2 \ varepsilon _ {23} \\ 2 \ varepsilon _ {13} \\ 2 \ varepsilon _ {12} \ end {bmatrix}} \, \ Equiv \, {\ begin {bmatrix} \ varepsilon _ {1} \\\ varepsilon _ {2} \\\ varepsilon _ {3} \\\ varepsilon _ {4} \\\ varepsilon _ {5} \\\ varepsilon _ {6} \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/99d84c34fc9efc62922b42a33f888656c62d794b)
Тогда тензор жесткости ( c) можно выразить как
![{\ displaystyle [{\ mathsf {c}}] \, = \, {\ begin {bmatrix} c_ {1111} amp; c_ {1122} amp; c_ {1133} amp; c_ {1123} amp; c_ {1131} amp; c_ {1112} \\ c_ {2211} amp; c_ {2222} amp; c_ {2233} amp; c_ {2223} amp; c_ {2231} amp; c_ {2212} \\ c_ {3311} amp; c_ {3322} amp; c_ {3333} amp; c_ {3323} amp; c_ {3331} amp; c_ {3312} \ \ c_ {2311} amp; c_ {2322} amp; c_ {2333} amp; c_ {2323} amp; c_ {2331} amp; c_ {2312} \\ c_ {3111} amp; c_ {3122} amp; c_ {3133} amp; c_ {3123} amp; c_ {3131} amp; c_ {3112 } \\ c_ {1211} amp; c_ {1222} amp; c_ {1233} amp; c_ {1223} amp; c_ {1231} amp; c_ {1212} \ end {bmatrix}} \, \ Equiv \, {\ begin {bmatrix} C_ {11} amp; C_ {12} amp; C_ {13} amp; C_ {14} amp; C_ {15} amp; C_ {16} \\ C_ {12} amp; C_ {22} amp; C_ {23} amp; C_ {24} amp; C_ {25} amp; C_ {26} \\ C_ {13 } amp; C_ {23} amp; C_ {33} amp; C_ {34} amp; C_ {35} amp; C_ {36} \\ C_ {14} amp; C_ {24} amp; C_ {34} amp; C_ {44} amp; C_ {45} amp; C_ {46} \\ C_ {15} amp; C_ {25} amp; C_ {35} amp; C_ {45} amp; C_ {55} amp; C_ {56} \\ C_ {16} amp; C_ {26} amp; C_ {36} amp; C_ {46} amp; C_ {56} amp; C_ {66} \ конец {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85c8bf05adff9dcaec56f4863dd039fae5986a79)
а закон Гука записывается как
![{\ displaystyle [{\ boldsymbol {\ sigma}}] = [{\ mathsf {C}}] [{\ boldsymbol {\ varepsilon}}] \ qquad {\ text {или}} \ qquad \ sigma _ {i} = C_ {ij} \ varepsilon _ {j} \,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f0315b5cfc25f83e499fadf8ce4921e11340f8e)
Аналогично тензор ( ы) податливости можно записать как
![{\ displaystyle [{\ mathsf {s}}] \, = \, {\ begin {bmatrix} s_ {1111} amp; s_ {1122} amp; s_ {1133} amp; 2s_ {1123} amp; 2s_ {1131} amp; 2s_ {1112} \\ s_ {2211} amp; s_ {2222} amp; s_ {2233} amp; 2s_ {2223} amp; 2s_ {2231} amp; 2s_ {2212} \\ s_ {3311} amp; s_ {3322} amp; s_ {3333} amp; 2s_ {3323} amp; 2s_ {3331} amp; 2s_ {3312} \ \ 2s_ {2311} amp; 2s_ {2322} amp; 2s_ {2333} amp; 4s_ {2323} amp; 4s_ {2331} amp; 4s_ {2312} \\ 2s_ {3111} amp; 2s_ {3122} и 2s_ {3133} amp; 4s_ {3123} amp; 4s_ {313112} amp; 4s_ {313112} amp; 4s_ {313112} amp; 4s_ {313112} amp; 4s_ } \\ 2s_ {1211} amp; 2s_ {1222} amp; 2s_ {1233} amp; 4s_ {1223} amp; 4s_ {1231} amp; 4s_ {1212} \ end {bmatrix}} \, \ Equiv \, {\ begin {bmatrix} S_ {11} amp; S_ {12} amp; S_ {13} amp; S_ {14} amp; S_ {15} amp; S_ {16} \\ S_ {12} amp; S_ {22} amp; S_ {23} amp; S_ {24} amp; S_ {25} amp; S_ {26} \\ S_ {13 } amp; S_ {23} amp; S_ {33} amp; S_ {34} amp; S_ {35} amp; S_ {36} \\ S_ {14} amp; S_ {24} amp; S_ {34} amp; S_ {44} amp; S_ {45} amp; S_ {46} \\ S_ {15} amp; S_ {25} amp; S_ {35} amp; S_ {45} amp; S_ {55} amp; S_ {56} \\ S_ {16} amp; S_ {26} amp; S_ {36} amp; S_ {46} amp; S_ {56} amp; S_ {66} \ конец {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34760b2d8ef86f720051aebe5a45a65b312bcab6)
Смена системы координат
Если линейный упругий материал поворачивается из эталонной конфигурации в другую, то этот материал является симметричным относительно вращения, если компоненты тензора жесткости в повернутой конфигурации связаны с компонентами в эталонной конфигурации соотношением

где l ab - компоненты ортогональной матрицы вращения [ L ]. То же соотношение верно и для инверсий.
В матричной записи, если преобразованный базис (повернутый или инвертированный) связан с опорным базисом соотношением
![{\ displaystyle [\ mathbf {e} _ {i} '] = [L] [\ mathbf {e} _ {i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/213d0bb55cc1da894c855871790e09d78635c17b)
тогда

Кроме того, если материал симметричен относительно преобразования [ L ], то

Ортотропные материалы
Основная статья:
ортотропный материал Ортотропные материалы имеют три ортогональные плоскости симметрии. Если базисные векторы ( e 1, e 2, e 3) нормали к плоскостям симметрии, то из соотношений преобразования координат следует, что

Обратное к этому соотношению обычно записывается как

куда
- E i - модуль Юнга по оси i
- G ij - модуль сдвига в направлении j на плоскости, нормаль которой проходит в направлении i.
- ν ij - коэффициент Пуассона, который соответствует сжатию в направлении j, когда расширение применяется в направлении i.
В условиях плоского напряжения σ zz = σ zx = σ yz = 0 закон Гука для ортотропного материала принимает вид

Обратное соотношение:

Также часто используется транспонированная форма указанной выше матрицы жесткости.
Трансверсально изотропные материалы
Поперечно - изотропный материал является симметричным относительно вращения вокруг оси симметрии. Для такого материала, если е 3 - ось симметрии, закон Гука можно выразить как

Чаще за ось симметрии принимается ось x ≡ e 1, а обратный закон Гука записывается как

Универсальный индекс упругой анизотропии
Чтобы понять степень анизотропии любого класса, был сформулирован универсальный индекс упругой анизотропии (AU). Он заменяет коэффициент Зенера, который подходит для кубических кристаллов.
Термодинамическая основа
Линейные деформации упругих материалов можно аппроксимировать адиабатическими. В этих условиях и для квазистатических процессов первый закон термодинамики для деформируемого тела можно выразить как

где δU - увеличение внутренней энергии, а δW - работа, совершаемая внешними силами. Работу можно разделить на два срока.

где δW s - работа, совершаемая поверхностными силами, а δW b - работа, совершаемая объемными силами. Если δ u представляет собой вариацию поля смещения u в теле, то два внешних рабочих члена могут быть выражены как

где t - вектор поверхностного натяжения, b - вектор телесной силы, Ω - тело, а ∂ Ω - его поверхность. Используя связь между напряжением Коши и поверхностным сцеплением, t = n σ (где n - единичная внешняя нормаль к ∂ Ω), мы имеем

Преобразование интеграла по поверхности в интеграл по объему с помощью теоремы о расходимости дает

Используя симметрию напряжения Коши и тождество

у нас есть следующие

Из определения деформации и уравнений равновесия имеем

Следовательно, мы можем написать

и поэтому изменение плотности внутренней энергии дается выражением

Упругая материал определяется как тот, в котором полная внутренняя энергия равна потенциальной энергии внутренних сил (также называют энергию упругой деформации). Следовательно, плотность внутренней энергии является функцией деформаций, U 0 = U 0 ( ε), и изменение внутренней энергии может быть выражено как

Поскольку изменение деформации произвольно, зависимость напряжения от деформации упругого материала определяется выражением

Для линейно-упругого материала величина ∂ U 0/∂ εявляется линейной функцией от ε и поэтому может быть выражена как

где c - тензор материальных констант четвертого ранга, также называемый тензором жесткости. Мы можем понять, почему c должен быть тензором четвертого ранга, заметив, что для линейного упругого материала

В индексной записи

Константа в правой части требует четырех индексов и является величиной четвертого ранга. Мы также можем видеть, что эта величина должна быть тензором, потому что это линейное преобразование, которое переводит тензор деформации в тензор напряжений. Мы также можем показать, что константа подчиняется правилам преобразования тензоров для тензоров четвертого ранга.
Смотрите также
Примечания
использованная литература
- Угурал, AC; Фенстер, СК (2003). Продвинутая сила и прикладная эластичность (4-е изд.). Прентис-Холл. ISBN 978-0-13-047392-9.
- Уолтер Левин объясняет закон Гука. От Уолтера Левина (1 октября 1999 г.). Закон Гука, простой гармонический осциллятор. Курс MIT 8.01: Классическая механика, лекция 10 (видеокассета). Кембридж, Массачусетс, США: MIT OCW. Событие происходит в 1: 21–10: 10. Архивировано 29 июня 2011 года из оригинала (ogg). Проверено 23 декабря 2010 года.
... возможно, самое важное уравнение во всей физике.
- Проверка закона Гука. От Уолтера Левина (1 октября 1999 г.). Закон Гука, простой гармонический осциллятор. Курс MIT 8.01: Классическая механика, лекция 10 (видеокассета). Кембридж, Массачусетс, США: MIT OCW. Событие происходит в 10: 10–16: 33. Архивировано 29 июня 2011 года из оригинала (ogg). Проверено 23 декабря 2010 года.
внешние ссылки
| Формулы преобразования |
| Однородные изотропные линейные упругие материалы обладают своими упругими свойствами, однозначно определяемыми любыми двумя модулями из них; таким образом, при любых двух любых других модулях упругости можно рассчитать по этим формулам. |
|  |  |  |  |  |  | Примечания |
 | | |  |  |  |  | |
 | |  | |  |  |  | |
 | |  |  | |  |  | |
 | |  |  |  | |  | |
 | |  |  |  |  | | |
 |  | | |  |  |  |  |
 |  | |  | |  |  | |
 |  | |  |  | |  | |
 |  | |  |  |  | |  Есть два верных решения. Знак плюс ведет к. Знак минус ведет к. |
 |  |  | | |  |  | |
 |  |  | |  | |  | Не может использоваться, когда  |
 |  |  | |  |  | | |
 |  |  |  | | |  | |
 |  |  |  | |  | | |
 |  |  |  |  | | | |

