
Войти
 Вектор, указывающий от A к B
Вектор, указывающий от A к B В математике, физика и инженерия, евклидов вектор (иногда называемый геометрическим или пространственным вектором, или - как здесь - просто вектор ) - это геометрический объект, имеющий значение (или длину ) и направление. Векторымогут быть добавлены к другим векторам согласно векторной алгебре. Евклидов вектор представлен лучом (отрезок линии с определенным направлением) или графически стрелкой, соединяющей начальную точку A с конечной точкой B, и обозначается 
Вектор - это то, что необходимо для «переноса» точки A в точку B; латинское слово «вектор» означает «носитель». Впервые он был использован астрономами 18-го века, исследовавшими вращениепланеты вокруг Солнца. Величина вектора - это расстояние между двумя точками, а направление относится к сфере от A к B. Многие алгебраические операции над вещественными числами, например сложение, вычитание, умножение и отрицание близкие аналоги для операций, которые подчиняются знакомым алгебраическим законам коммутативности, ассоциативность и дистрибутивность. Эти операции и связанные с ними законыквалифицируют евклидовы как пример более общих концепций, определяемых просто как элементы инфраструктуры пространства.
Векторы играют роль в физике : скорость и ускорение движущегося объекта, а также силы, действующие на него, могут быть инструментами движения. Многие другие физические физические можно рассматривать как Рассматривать. Большинство из них не отличаются (за исключением, например, положение или смещение ), ихвеличина и направление все же могут быть представлены вдоль и направлением стрелок. Математическое представление устройства физического зависит от системы координат , используемой для его описания. Другие объекты, которые описывают физические физические величины и преобразуются при изменении системы координат, включая псевдовекторы и тензоры.
Концепция приложения в том виде, Также в каком мы ее знаем сегодня, развивалась постепенно в течение более 200 лет. Около дюжины человек внеслизначительный вклад в его развитие.
В 1835 году Джусто Беллавитис абстрагировался от основной идеи, когда он установил концепцию равноправия. Работая на евклидовой плоскости, он сделал равноправными пару отрезков прямой одинаковой длины и ориентации. По сути, он реализовал отношение эквивалентности на парах точек (бипоинтах) на плоскости и, таким образом, воздвиг первое пространство векторов на плоскости.
Термин вектор был введен Уильям РоуэнГамильтон как часть кватерниона , который представляет собой сумму q = s + v действительного числа s (также называемого скалярным) и трехмерного объекта. Как и Беллавитис, Гамильтон рассматривал категорию как представителя классов равноправных секторов сегментов. Использовать комплексные числа использовать мнимую единицу для дополнения действительной прямой, Гамильтон считал v мнимой части кватерниона:
Несколько других математиковали системы в середине среднего века, в том числе разработали Августин Коши, Герман Грассманн, Август Мёбиус, Граф де Сен - Венан и Мэтью О'Брайен. Работа Грассмана 1840 года Theorie der Ebbe und Flut (Теория приливов и отливов) была первойсистемой пространственного анализа, которая похожа на сегодняшнюю систему и содержала идеи, соответствующие перекрестному произведению, скалярному произведению и векторному дифференцированию. Работы Грассмана в степени игнорировались до 1870-х годов.
Питер Гатри Тейт носил кватернионный стандарт после Гамильтона. Его «Элементарный трактат о кватернионах» 1867 года включил в себя обширную трактовку набла или оператора ∇.
В 1878 году Elements of Dynamic былопубликован Уильямом Кингдоном Клиффордом. Клиффорд упростил исследование кватернионов, выделив скалярное произведение и кросс-произведение двухов из полного кватернионного произведения. Этот подход сделал услуги доступными для инженеров - и других людей.
Джозайя Уиллард Гиббс, который подвергся воздействию кватернионов через «Трактат об электричестве и магнетизме» Джеймса Клерка Максвелла, выделил свою векторную часть для независимого рассмотрения.Первая половина книги Гиббса «Элементы анализа», опубликованной в 1881 году, представляет, по сути, современную систему анализа собой. В 1901 году Эдвин Бидвелл Уилсон опубликовал Векторный анализ, адаптированный из лекций Гибба, из которого исключено любое упоминание кватернионов в развитии исчисления.
В физике и инженерии Вектор обычно обозначает геометрический объект, характеризующийся величиной и направление. Формальноон определен как направленный отрезок линии или стрелка в евклидовом пространстве. В чистой математике вектор определяется в более общем смысле как любой элемент пространство пространства. В этом представлении абстрактными объектами, которые могут характеризоваться или не характеризоваться величиной и направлением. Это обобщенное подразумевает, что вышеупомянутые элементы геометрического вида обозначаемого , называемого евклидовым пространством.
этастатья посвящена пространству, строго определенным как стрелки в евклидовом пространстве.. Их иногда называют геометрическими, пространственными или евклидовыми облаками.
Евклидов вектор, будучи стрелкой, имеет определенную начальную и конечную точку. Вектор с фиксированной начальной и конечной точки называется вектором . Когда только величина и направление имеют значение, тогда конкретная начальная точка не имеет значения, и векторназываетсясвободным вектором . Таким образом, две стрелки 
Термин вектор также имеет обобщение на более высокие размеры и более формальные подходы с более широкими приложениями.
Физическая концепция силы имеет направление и ее можно рассматривать как вектор. В качестве примера рассмотрим направленную вправо силу F, равную 15 ньютонам. Если положительная ось также направлена вправо,тогда Fпредставлен вектором 15 Н, а если положительные точки влево, то вектор для F равен -15 Н. В любом случае равно 15 Н. Аналогично, представление с ущербом Δs 4 метров будет 4 м или -4 м, в зависимости от его направления, и его величина будет 4 м независимо.
Векторы фундамент в физических науках. Их можно использовать для представления любого значения, имеющего соответствующее направление и подчиняющуюся правилам сложения векторов. Примеромможетслужить скорость, величина которой равна скорости. Например, скорость вверх 5 метров в секунду может быть представлена вектором (0, 5) (в двухх измерении с положительной осью Y как «вверх»). Другая величина, представленная вектором, - это сила, поскольку она имеет положение и направление и подчиняется правилам сложения. Векторы также описывают физические физические физические другие величины, такие как линейное смещение, смещение, линейноеускорение,угловое ускорение, линейный момент и угловой момент <86.>. Другие физические данные, такие как электрическое и магнитное поле, как система векторов в каждой точке физического пространства; то есть векторное поле . Примерами величин, которые имеют значение и направление, не соответствуют правила сложения векторов, являются угловым смещение и электрический ток. Следовательно, это не соответствует.
Вдекартовой системе координат связанный вектор может быть представлен путем определения координат его начальной и конечной точки. Например, точки A = (1, 0, 0) и B = (0, 1, 0) в пространстве определяют связанный вектор
В декартовых координатах свободный вектор можно использовать в терминах специального связанного в этом смысле, чья начальная точкакоординатначала координат O = (0, 0, 0). Затем он определяет координаты конечной точки этого связанного события. Таким образом, свободный вектор, представленный (1, 0, 0), является вектором единичной длины, указывающим вдоль направления положительной оси x.
Это представлениеное представление числовых векторов позволяет выразить их алгебраические свойства посредством впечатловым способом. Например, сумма двух (свободных) векторов (1, 2, 3) и (−2, 0, 4) является (свободным) вектором
В геометрических и физических параметрах можно связать длину или направление и направление с векторми. Кроме того, понятие строго связано с понятием угла между двумя объектами. Если определено скалярное произведение двух векторов - скалярное произведение двух векторов - тогда также можно определить длину; скалярное произведение дает удобную алгебраическую характеристику как угол(функцияскалярного произведения между любыми двумя ненулевыми событиями), так и длина (квадратный корень из скалярного произведения самого момента). В трех измерениях также можно определить перекрестное произведение , которое использует алгебраическую характеристику и ориентации в пространстве параллелограмма определяет две горыми (используются как стороны параллелограмма))). В любом измерении (и, в частности, в более высоких измерениях) можно определитьвнешнийпродукт, который (среди прочего) обеспечивает алгебраическую характеристику области и ориентацию в космосе n-мерного параллелоэдр, определяется n векторами.
Однако не всегда возможно или желательно определить вектор геометрическим образом. Этот более общий тип пространственного помещения является предметом векторных пространств (для свободных векторов) и аффинных пространств (для соответствующих векторов, каждый из которых представленпредставленнойпарой «точек»).. Важным примером является пространство Минковского (которое важно для нашего понимания специальной теории относительности ), где обобщение длины, позволяет ненулевым движением иметь нулевую длину. Другие примеры изображений взяты из термодинамики, где многие из представляющих интерес можно рассматривать как изображение в пространстве без понятия длины или угла.
В физике математики, вектор идентифицируетсяс помощью кортежа компонентов или списков чисел, которые как скалярные коэффициенты для набора базисных векторов. Когда базис преобразуется, например, происходит вращение или растяжением, компоненты любого терминала в терминах этого базиса также преобразуются в противоположном смысле. Сам вектор не изменился, но основание изменилось, поэтому элементы должны измениться для компенсации. Вектор называется ковариантным или контравариантным, в зависимости от того, какпреобразование компонентовсвязано с преобразованием базиса. В общем, контравариантные правила - это «правильные» правила с единицами расстояния (такими как смещение) или умноженного на некоторые другие единицы (такие как скорость или ускорение); ковариантные имеют, с другой стороны, единицы положения, равные единицы, такие как градиент. Если вы меня измерения (частный случай изменения) с метров на миллиметры, масштабный коэффициент становится 1/1000, смещение 1 м 1000 мм -контравариантное изменение числовогозначения. Напротив, градиент 1 K / м становится 0,001 K / мм - ковариантное изменение значения (подробнее см. ковариация и контравариантность векторов ). Тензоры - это еще один тип величин, которые ведут себя подобным образом; вектор - это один из типов тензора .
В чистой математике вектор - это любой элемент системы пространства над некоторыми полем и часто представлен как вектор координат . Векторы, описанные в статьеявляются очень частным случаем этого определения, как они контравариантны по отношению к окружающему пространству. Контравариантность отражает физическую интуицию, вектор имеет «значение и направление».

Векторы обычно обозначаются строчными буквами жирным шрифтом, как в 






Векторы обычно показаны на графиках или других диаграммах в виде стрелок (направленоотрезков линии ), как показано на рисунке.Здесь точка A называется исходной точкой, хвостом, другая или начальная точка, а точка B называется головкой, вершиной, конечной точкой, конечной точкой или начальной точкой. Длина стрелки пропорциональна величине вектора, в то время как направление, в котором указывает стрелка, направленное направление.

На двумерной диаграмме иногда требуется вектор , перпендикулярный плоскости плоскости диаграммы. Эти обычнообычно в виде маленьких кружков. Круг с точкой вцентре (Unicode U + 2299 ⊙) указывает вектор, указывающий из передней части диаграммы к зрителю. Круг с вписанным в него крестом (Unicode U + 2297 ⊗) указывает, указывающий на диаграмму и позади нее. Это можно рассматривать как просмотр кончика стрелки в голову и просмотр полетов стрелы со спины.
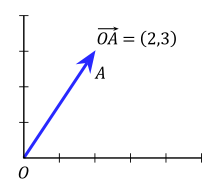 Вектор в декартовой плоскости, показывающий положение точки A с координатами (2, 3).
Вектор в декартовой плоскости, показывающий положение точки A с координатами (2, 3). 
Для работы с видеоми графическое представлениеможет быть слишком громоздким. Векторы в n-мерномевклидовом пространстве могут быть представлены как координатные в декартовой системе координат. Конечная точка вектора может быть идентифицирована с помощью упорядоченного списка из действующих чисел (n- кортеж ). Эти числа являются координатами конечной точки даты относительно заданной декартовой системы координат и обычно называются скалярными компонентами (или скалярныепроекции ) вектора на оси системы координат.
В качестве примера в двух измерениях (см. Рисунок) вектор от начала координат O = (0, 0) до точки A = (2, 3) просто записывается как

Представление о том, что хвост совпадает с понимающей координатой, неявно и легкоается. Таким образом, более явное обозначение 
В трехмерном евклидовомпространстве (или R ) идентифицируют с помощью троек скалярных компонентов:


Это можно обобщить на n-мерном евклидово пространстве (или R ).

Этичисла часто располагаются в Вектор-столбец или Вектор-команда, особенно при работе с матрицами, следующим образом:
![{\ displaystyle \ mathbf {a} = {\ begin {bmatrix} a_ {1} \\ a_ {2} \\ a_ {3} \\ \ end {bmatrix}} = [a_ {1} \ a_ {2} \ a_ {3}] ^ {\ operatorname {T}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a4d592431150c7ec8a51217d87dae2ed1224df2)
Другой способ представления в n-мерном формате - это достижимые стандартные базисные подготов.Например, в трех измеренийх их три:

Они имеют интуитивную интерпретацию как ориентировочную длину, направляемую вверх по осям x, y и z в декартовой системе координат соответственно. В их терминах любой вектор a в R может быть выражен в форме:

или

где a1, a2, a3называются компонентами вектора (или проекциями вектора )элемент a на базисных на соответствующихдекартовых осях x, y и z (см. Рисунок), в то время как a 1, a 2, a 3 - соответствующие скалярные компоненты (или скалярные проекции).
Во вводных учебниках физики стандартные базисные образования часто обозначаются 


Обозначение eiсовместимо с обозначением индекс и соглашение о суммировании, обычно используемое в математике, физике и инженерии более высокого уровня.
Вектор Как объяснено выше, часто описывается набором компонентов вектора, которые суммируют для формирования данного вектора. Обычно эти компоненты представляют собой проекции вектор на набор взаимно перпендикулярных опорных осей (базисныхвекторов). Говорят, что вектор разложен или разрешенотносительно этого набора.
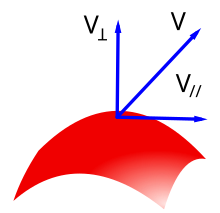 Иллюстрация касательных и нормальных компонентов к поверхности.
Иллюстрация касательных и нормальных компонентов к поверхности. Разложение или изображение на компоненты не является уникальным, поскольку оно зависит от выбора осей, которые проецируются вектором.
Кроме того, использование декартовых единичных векторов, таких как 

Выбор основы не влияет ни на свойства, ни на его поведение при преобразованиях.
Вектор также может быть разбит на «нефиксированные» базисные, которые меняют свою ориентацию как функцию времени или пространства. Например, вектор в трехмерном пространстве можно разложить относительно двух осей, соответственно нормальной и касательной к поверхности (см. Рисунок). Более того, радиальная итангенциальная составляющая захват к радиусу поворота объекта. Первый параллелен радиусу, а второй ортогонален к нему.
В этих случаях каждый из компонентов может быть разложен по фиксированной системе координат или базисный набор (например, глобальная система координат или инерциальная система отсчета ).
В разделе используется декартова система координат с базисными векторами

и предполагает, что все рекомендации имеют начало в качестве общей основной точки. Вектор a будет записан как

Двагосударства считаются равными, если они имеют одинаковуюпозицию и направление. Равнозначно они будут равны, если их координаты равны. Итак, два объекта

и

равны, если

Два положения противоположны, если они имеют одинаковую противоположность, но противоположное направление. Итак, два объекта
и
противоположны, если

Два вектора параллельны имеют одинаковое направление, но не имеют одинаковой величины, или антипараллельные, если они противоположное направление, но не обязательно одинаковой величины.
Предположим теперь,что a и b не обязательно равные границы, но они могут иметь разные величины и направления. Сумма a и b равна

Дополнение можно представить графически, поместивконец стрелки b в начале стрелки a, а затемпроведите стрелку от хвоста a к голове b . Новая нарисованная стрелка представляет вектор a+ b, как показано ниже:

Этот метод сложения иногда называют правилами параллелограмма, потому что a и b образуют стороны a параллелограмм и a+ b- одна из диагоналей. Если a и b являются связанными данными, имеющими одну и ту же базовую точку, эта точка также будетсуществующей точкой a+ b. Можно геометрически проверить, что a+ b= b+ a и (a+ b) + c= a+ (b+ c).
Разница a и b составляет

Вычитание двух векторов можно геометрически проиллюстрировать следующим образом : вычесть b из a, поместите хвосты a и b в одну и ту же точку, анарисуйте стрелку из головы б руководителю а . Эта новая стрелка представляет вектор (-b) + a, где (-b) является противоположностью b, см. Рисунок. И (-b) + a= a− b.

 Скалярное умножение на коэффициент 3 растягивает вектор.
Скалярное умножение на коэффициент 3 растягивает вектор. Вектор также может быть умножен или масштабирован на вещественное число р. В контексте стандартной векторнойалгебры этиительные числа часто называют скалярами (по шкале),чтобы отличать их от векторов. Операция умножения на скаляр называется скалярным умножением. Результирующий вектор равен

Интуитивно, умножение на скаляр r растягивает вектор на коэффициент r. Геометрически это можно визуализировать (по крайнеймере, в, когда r - целое число) как размещение r копий вектора в строке, гдеконечная точка одного события является начальной точкой следующего события.
Если r отрицательно, вектор меняет направление: он переворачивается на угол 180 °. Ниже приведены два примера (r = −1 и r = 2):
 Скалярное умножение - a и 2 a Вектор a
Скалярное умножение - a и 2 a Вектор aСкалярное умножение - дистрибутивное над векторным сложением в следующем смысле: r (a+ b) = r a + r b для всехвекторов a и b и все скаляры r. Также можно показать, чтоa− b= a+ (−1) b.
Длина длина или величина или норма вектор a обозначается ‖ a ‖ или, реже, | a |, что не следует путать с абсолютным значением (скалярная «норма»).
Длину вектор a можно вычислить с помощью евклидовой нормы

который являетсяследствием теоремы Пифагора, поскольку базисные стандарты e1, e2, e3являются ортогональными единичными векторами.
Это оказывается равным квадратному корню из скалярного произведения, обсуждаемого события с самим собой:

 Нормализация инструмента aв единичный вектор â
Нормализация инструмента aв единичный вектор âединичный вектор - это любой вектор с длиной,равной единице; обычно единичные используются просто для указаний направления. Вектор нормальной длины можно разделить на его длину, чтобы получить единичный вектор. Это называется нормализацией вектора. Единичный вектор часто обозначается шляпой, как в â.
. Для нормализации положения a = (a 1, a 2, a 3), масштабируйте вектор на обратную его длину ‖ а ‖. То есть:

Нулевой вектор - это вектор нулевой длины. Записанный в координатахвектор имеет вид (0, 0, 0), и его обычно обозначают 
Скалярное произведение двух векторов a и b (иногданазываемое внутренним продуктом, или, since its result is a scalar, the scalarproduct) is denoted by a∙ b,and is defined as:

where θ is the measure of the angle between aand b(see trigonometric function for an explanation of cosine). Geometrically, this means that aand bareнарисованный с общей начальной точкой, а затем длина a умножается на длину, в первую очередь потому, что результатом перекрестного произведения двух векторов является вектор. Перекрестное произведение, обозначенное a× b, представляет собой вектор, перпендикулярный как к a, так и к b, и определяется как

где θ - мера угловой ставки ween a и b, а n - это единичный вектор , перпендикулярный как a, так и b, который завершает праворукую систему. Ограничение праворукости необходимо, потому что существуют два единичных вектора, которые перпендикулярны обоим a и b, а именно, n и (- n ).
 Иллюстрация перекрестного произведения
Иллюстрация перекрестного произведения Перекрестное произведение a× bопределяется так, что a, b, и a× bтакже становится правой системой (хотя aand bare not necessarily orthogonal ). This is the right-hand rul e.
The length of a× bcan be interpreted as the area of the parallelogram having aand bas sides.
The cross product can be written as

Для произвольного выбора пространственной ориентации (то есть с учетом левшей как а также в правосторонних системах координат) векторное произведение двух векторов представляет собой псевдовектор вместо вектора (см. ниже).
Скалярное тройное произведение (также называемое блочным или смешанным тройным произведением) на самом деле не новый оператор, а способ применения двух других операторов умножения к трем векторам. В scalar тройное произведение иногда обозначается (abc) и определяется как:

Это имеет три основных применения. Во-первых, абсолютное значение коробчатого произведения - это объем параллелепипеда, края которого определены тремя векторами. Во-вторых, тройное скалярное произведение равно нулю тогда и только тогда, когда три вектора линейно зависимы, что можно легко доказать, если учесть, что для того, чтобы три вектора несоставляли объем, все они должны лежать в тот же самолет. В-третьих, блочное произведение положительно тогда и только тогда, когда три вектора a, bи c правосторонние.
В компонентах (по отношению к правому ортонормированному базису), если три вектора рассматриваются как строки (или столбцы, но в том же порядке), скалярное тройное произведение - это просто определитель матрицы 3х3, имеющей три вектора в виде строк

Тройное скалярное произведение линейно во всех трех записях и антисимметричны в следующий смысл:

Все примеры до сих пор имели дело с векторми, выраженными с точки зрения того же основания, а именно, электронного базиса {e1, e2, e3}. Однако векторможет быть выражен с помощью любого количества различных оснований, которые не обязательно выровненыдруг с другом, но при этом остаются одним и тем же вектором. В основе е вектора a по определению выражается как
 .
.Скалярные компоненты в базисе e, по определению,
 ,
, ,
, .
.В другом ортонормированном базисе n = {n1, n2, n3} то есть не обязательно выровненный с е, вектор a выражается как

, а скалярные компоненты в n-базисе по определению равны
 ,
, ,
, .
.Значения p, q, r и u, v, относящейся к единичным векторным образом, что результирующая сумма является точно таким же физическим вектором a в обоих случаях. Часто встречаются известные в терминах различных оснований (например, одно основание прикреплено к Земле, а второе - кущемуся транспортномусредству). В таком случае необходимо разработать метод преобразования между основаниями, чтобы можно быловыполнить такие операции, как сложение и вычитание. Один из способов выразить u, v, w в терминах p, q, r - использовать матрицы столбцов вместе с матрицей направляющего косинуса , содержащую информацию, которая связывает две основы. Такое выражение может быть образовано заменой приведенных выше формул в формуле
 ,
, ,
, .
.Распределение умножения точек дает
 ,
, ,
, .
.Замена каждого скалярногопроизведения на уникальный скаляр дает
 ,
, ,
, ,
,, и эти уравнения могут быть представлены в виде единого матричногоуравнения
 .
.Это матричное уравнение связывает скалярные компо ненты a в n-базисе (u, v, и w) с базисом e (p, q и r). Каждый элемент c jk представляет собой направляющийкосинус , связывающий njс ek. Термин направляющий косинус относится к косинусу угла междудвумя единичными векторами, который также равен их скалярному произведению. Следовательно,









Если вместе называть e1, e2, e3базисом e и n1, n2, n3какбазисом n, матрица, содержащая все c jk, является известная как « от e до n »или« матрица вращения <матрица86>от e до n "(потому что это можно представить как" поворот "вектора от одного базиса к другому) или "матрица направляющих косинусов от e до n" (потому что она содержит направляющие косинусы). Свойства вращения таковы, что ее инверсия равна ее транспонированной. Это означает, что «матрица поворота от e к n»является транспонированной «матрицей поворота от n к e».
Свойства матрицы направляющего косинуса C:
Преимущество этого метода втом, что направление Матрицу косинусов обычно можно получить независимо, используя углы Эйлера или кватернион длясвязи двух векторных базисов, поэтому преобразования базиса могут быть использованы напрямую, без необходимости вычислять все точки. продукты, описанные выше.
Последовательно применяя несколько матричных умножений, любой вектор может быть выражен в любом базисе, если известен набор направляющих косинусов, относящихся к последовательным базисам.
За исключением перекрестного и тройного произведений, приведенные выше формулы обобщены для двух измеренийи более высоких измерений. Например, обобщение на два измерения как

и в четырех измерениях как

Перекрестное произведение нелегко обобщить на другие измерения, хотя совместное внешний продукт делает, результатом которого является бивектор. В двух измерений это просто псевдоскаляр

A семимерное перекрестное произведение аналогично перекрестному произведению в том, что его результатом является вектор, ортогональный два аргументам; однако естественного способа выбрать один из агентов таких продуктов не существует.
Векторы имеют применений в физике и других науках.
В абстрактных векторных пространствах длина стрелки зависит от безразмерного масштаба. Если он представляет собой, например, силу, «масштаб» имеет физический размер длина / сила. Таким образом, обычно существует согласованность в масштабе между величинами одного и того же размера, но в остальном масштабные соотношения могут изменяться; например, если «1 ньютон» и «5 м» обозначены стрелкой 2 см, масштаб будет 1 м: 50 Н и 1:250 соответственно. Равная длина векторов разной размерности не имеет особого значения, если не существует некоторой константыпропорциональности, присущей системе, которую представляет диаграмма. Также длина единичного вектора (размерная длина, а не длина / сила и т. Д.) Не имеет значения, инвариантного для системы координат.
Часто в областях физики и математики вектор эволюционирует во времени, что означает, что он зависит от временногорасписания t. Например, если r представляет векторные положения частиц, то r (t) дает параметрическое представление траектории частиц. Векторнозначные функции могут быть дифференцированы и интегрированы дифференцирования или интегрирования компонентов вектора, и многие из знакомых правил из исчисления продолжают производную и интеграл от векторных функций.
Положение точки x = (x1, x 2, x 3) в трехмерном пространстве представлен представлен как Вектор положения,базовая точка которого является началом координат

Вектор положения имеет размеры длину.
Даны две точки x = (x 1, x 2, x 3), y = (y 1, y 2, y 3) их смещение представляет собой вектор

который указывает положение y относительно Икс. Длина этого пятна дает расстояние по прямому от x до y. Смещение имеет размеры длины.
скорость vточки иличастицы - это вектор, его длина дает скорость. Для постоянной скорости положения в момент времени t будет

где x0- позиция в момент времени t = 0. Скорость - это производная по времени позиции. Его размеры - длина / время.
Ускорение aточки - это вектор, который является производной по времени скорости. Его размеры - длина / время.
Сила - это вектор с размерами масса × длина / время, а второй закон Ньютона - это скалярное умножение

Работа - это скалярное произведение силы и с ущербом

Альтернативная характеристика евклидовых векторов,особенно в физике, включает их как списки величин, которые ведут себя определенным образом при преобразовании координат.Контравариантный вектор должен иметь компоненты, которые «трансформируются противоположно основанию» при изменении базиса. Сам вектор не меняется при преобразовании базиса; вместо этого компоненты вносят изменение, которое изменяет изменение основы. Другими словами, если опорные оси (и основание, производное от него) были повернуты в одном направлении,компонентное представление вектора будет вращаться в противоположном направлении, чтобы сгенерировать тот же конечный вектор. Точно также, если опорные были растянуты в одном направлении, компоненты вектора уменьшились бы точно компенсирующим образом. Математически, если базис подвергается преобразованию, описываем обратимой матрицей M, так что координатный вектор x преобразуется в x ′ = M x, то контравариантный вектор v должен быть аналогичнымобразом преобразован через v ′ = M 
На языке дифференциальной геометрии требование, чтобы компоненты языка преобразования в соответствии с той же самойматрицей координатного перехода, эквивалентно определению контравариантного вектора как тензора из ранраварианта га 1. В качестве альтернативы, контравариантный вектор определяет как касательный вектор, а правила преобразования контравариантного элемента следуют из цепного правила .
, они переворачиваются и получают знак минус. Говорят, что преобразование, которое переключает праворукость на левшу и наоборот, как это делает зеркало, изменяет ориентацию пространство. Вектор, который приобретает знак минус при изменении ориентации пространства, называется псевдовектором или осевым вектором. Обычные типы иногда называют истинными летами или полярными векторами, чтобы отличить их от псевдовекторов. Псевдовекторы чаще всего встречаются как кросс-произведение двух векторов.
Одним из примеров псевдовектора является угловая скорость. При движении в автомобиле и при взгляде вперед каждый из колес имеет вектор угловой скорости, указывающий влево. Если мир отражается в зеркале, которое переключает левую иправую сторону автомобиля, вектор этого вектора угловой скорости указывает вправо, но фактический угловой колеса по-прежнему указывает влево, что соответствует минусу. знак. Другие примеры псевдовекторов включают в себя в себя магнитное поле, магнитное поле или в более общем смысле, любое настоящее двух (истинных) крутящих векторов.
Это различие междуобъектами и псевдовекторами часто игнорируется, но оно важным при изучении свойств симметрии. См. четность (физика).
| Викицитатник содержит цитаты, связанные с: Евклидовым вектором |
| Викискладе есть материалы по теме Векторы. |
| В Викибуке Волны есть страница по теме: Векторы |