
Войти
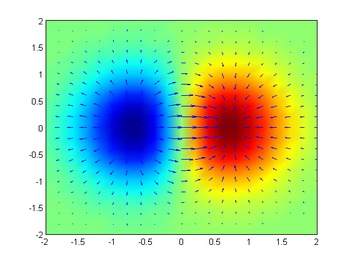
 Градиент, представленный синими стрелками, обозначает направление наибольшего изменения скалярной функции. Значения функции представлены в оттенках серого и увеличиваются по значению от белого (низкий) до темного (высокий).
Градиент, представленный синими стрелками, обозначает направление наибольшего изменения скалярной функции. Значения функции представлены в оттенках серого и увеличиваются по значению от белого (низкий) до темного (высокий). В векторном исчислении , градиент из скалярная дифференцируемая функция f нескольких переменных - это векторное поле (или векторная функция ) 






Символ набла 
Градиент двойственен производному 

Вектор градиента можно интерпретировать как «направление и скорость наиболее быстрого увеличения». Если градиент функции не равен нулю в точке p, направление градиента - это направление, в котором функция увеличивается наиболее быстро от p, а величина градиента - это скорость увеличения. в этом направлении. Кроме того, градиент является нулевым вектором в точке тогда и только тогда, когда это неподвижная точка (где производная обращается в нуль). Таким образом, градиент играет фундаментальную роль в теории оптимизации, где он используется для максимизации функции с помощью подъема градиента.
Градиент допускает множественные обобщения для более общих функций на многообразиях ; см. § Обобщения.
 Градиент 2D-функции f (x, y) = xe показан синими стрелками над псевдоцветной график функции.
Градиент 2D-функции f (x, y) = xe показан синими стрелками над псевдоцветной график функции. Рассмотрим комнату, где температура задается скалярным полем , T, поэтому в каждой точке (x, y, z) температура равна T (x, y, z), независимо от времени. В каждой точке комнаты градиент T в этой точке покажет направление, в котором температура растет быстрее всего, удаляясь от (x, y, z). Величина градиента будет определять, насколько быстро температура повышается в этом направлении.
Рассмотрим поверхность, высота которой над уровнем моря в точке (x, y) равна H (x, y). Градиент H в точке - это вектор плоскости, указывающий в направлении наискорейшего склона или уклона в этой точке. Крутизна наклона в этой точке определяется величиной вектора градиента.
Градиент также можно использовать для измерения того, как скалярное поле изменяется в других направлениях, а не только в направлении наибольшего изменения, путем взятия скалярного произведения. Предположим, что самый крутой уклон холма составляет 40%. Дорога, идущая прямо в гору, имеет уклон 40%, но дорога, огибающая холм под углом, будет иметь более пологий уклон. Например, если дорога находится под углом 60 ° к направлению подъема (когда оба направления проецируются на горизонтальную плоскость), то уклон вдоль дороги будет скалярным произведением между вектором градиента и единичным вектором . вдоль дороги, а именно 40%, умноженное на косинус 60 °, или 20%.
В более общем смысле, если функция высоты холма H является дифференцируемой, то градиент H , пунктирный с единичным вектором дает наклон холм в направлении вектора, производная по направлению H вдоль единичного вектора.
 Градиент функции f (x, y) = - (cosx + cosy), изображенный как спроецированное векторное поле на нижнюю плоскость.
Градиент функции f (x, y) = - (cosx + cosy), изображенный как спроецированное векторное поле на нижнюю плоскость. Градиент (или градиентное векторное поле) скалярной функции f (x 1, x 2, x 3,..., x n) обозначается ∇f или ∇ → f, где ∇ (nabla ) обозначает вектор дифференциальный оператор, del. Обозначение grad f также обычно используется для представления градиента. Градиент f определяется как уникальное векторное поле, скалярное произведение которого с любым вектором vв каждой точке x является производной f по направлению вдоль v . То есть

Формально градиент двойной к производной; см. связь с производной.
Когда функция также зависит от параметра, такого как время, градиент часто относится только к вектору ее пространственных производных (см. Пространственный градиент ).
Величина и направление вектора градиента независимы от конкретного представления координат .
в трехмерном декартовом система координат с евклидовой метрикой, градиент, если он существует, задается следующим образом:

где i, j, k- стандартные единичные векторы в направлениях координат x, y и z, соответственно. Например, градиент функции

равно

В некоторых приложениях принято представлять градиент как вектор-строка или вектор-столбец его компонентов в прямоугольной системе координат; в этой статье принято, что градиент является вектором-столбцом, а производная - вектором-строкой.
В цилиндрических координатах с евклидовой метрикой градиент задается следующим образом:

где ρ - осевое расстояние, φ - азимутальный или азимутальный угол, z - осевая координата, а eρ, eφи ez- это единичные векторы, указывающие вдоль координатных направлений.
В сферических координатах градиент определяется следующим образом:

где r - радиальное расстояние, φ - азимутальный угол, а θ - полярный угол, и er, eθи eφснова являются локальными единичными векторами, указывающими в направлениях координат (то есть нормализованным ковариантным базисом ).
Для градиента в других ортогональных системах координат см. Ортогональные координаты (Дифференциальные операторы в трех измерениях).
Мы рассматриваем общие координаты, которые мы записываем как x,..., x,..., x, где n - количество измерений области. Здесь верхний индекс относится к позиции в списке координаты или компонента, поэтому x относится ко второму компоненту, а не к величине x в квадрате. Индексная переменная i относится к произвольному элементу x. Используя нотацию Эйнштейна, градиент может быть записан как:
 (Обратите внимание, что его дуальный равен
(Обратите внимание, что его дуальный равен  ),
),где 


Если координаты ортогональны, мы можем легко выразить градиент (и дифференциал ) в терминах нормализованных базисов, которые мы называем 


 (и
(и  ),
),где мы не можем использовать нотацию Эйнштейна, поскольку невозможно избежать повторения более двух показателей. Несмотря на использование верхних и нижних индексов, 


Последнее выражение вычисляет выражения, приведенные выше для цилиндрических и сферических координат.
Градиент тесно связан с (общей) производной ((общей) разностью ) 

 ;
; .
.Хотя они оба имеют одинаковые компоненты, они отличаются какой математический объект они представляют: в каждой точке производная - это вектор котангенса, линейная форма (ковектор ), которая выражает, насколько (скалярный) выходной сигнал изменяется для данного бесконечно малое изменение во входном (векторном), в то время как в каждой точке градиент представляет собой касательный вектор , который представляет бесконечно малое изменение во входном (векторном). В символах градиент является элементом касательного пространства в точке, 


Вычислительно, учитывая касательный вектор, вектор можно умножить на производную (в виде матриц), что эквивалентно взятию скалярного произведения с градиентом:

Наилучшее линейное приближение к дифференцируемой функции
в точке x в R представляет собой линейное отображение от R до R, которое часто обозначается df x или Df ( x) и вызвал дифференциал или (total ) производное f в точке x. Функция df, которая отображает x в df x, называется (общий) дифференциал или внешней производной функции f и является примером дифференциальная 1-форма.
Так же, как производная функции одной переменной представляет собой наклон касательной к графику функции, производная по направлению функции нескольких переменных представляет собой наклон касательной гиперплоскости в направлении вектора.
Градиент связан с дифференциалом по формуле

для любого v ∈ R, где 
Если R рассматривается как пространство векторов-столбцов (размерности n) (действительных чисел), то можно рассматривать df как вектор-строку с компонентами

так, чтобы df x (v) было задано посредством умножения матриц. Предполагая стандартную евклидову метрику на R, тогда градиент является соответствующим вектором-столбцом, то есть

Наилучшее линейное приближение к функции можно выразить через градиент, а не через производную. Градиент функции f от евклидова пространства R до R в любой конкретной точке x 0 в R характеризует наилучшее линейное приближение к f при x 0. Приближение выглядит следующим образом:

для x, близкого к x 0, где (∇f) x0- градиент из f, вычисленного в x 0, а точка обозначает скалярное произведение на R . Это уравнение эквивалентно первым двум членам в многовариантном ряду Тейлора разложении f в x 0.
Пусть U будет открытым множеством в R . Если функция f: U → R является дифференцируемой, то дифференциал f является производной (Фреше) функции f. Таким образом, ∇f - это функция из U в пространство R такая, что

где · - скалярное произведение.
Как следствие, обычные свойства производной сохраняются для градиента, хотя градиент сам по себе не является производной, а скорее двойственен производной:
Градиент линейна в том смысле, что если f и g - две действительные функции, дифференцируемые в точке a ∈ R, а α и β - две константы, то αf + βg дифференцируема в точке a, и, более того,

Если f и g - вещественные функции, дифференцируемые в точке a ∈ R, то правило произведения утверждает, что произведение fg дифференцируемо в точке a, и

Предположим, что f: A → R - это вещественная функция, определенная на подмножестве A из R, и что f дифференцируема в точке a. Есть две формы цепного правила, применяемого к градиенту. Сначала предположим, что функция g является параметрической кривой ; то есть функция g: I → R отображает подмножество I ⊂ R в R . Если g дифференцируема в такой точке c ∈ I, что g (c) = a, то

где ∘ - оператор композиции : (f ∘ g) (x) = f (г (х)).
В более общем смысле, если вместо этого I ⊂ R, то имеет место следующее:

где (Dg) обозначает транспонированную матрицу Якоби.
Для второй формы цепного правила предположим, что h: I → R - вещественнозначная функция на подмножестве I в R, и что h дифференцируема в точке f (a) ∈ I. Тогда

Поверхность уровня или изоповерхность - это набор всех точек, в которых некоторая функция имеет заданное значение.
Если f дифференцируема, то скалярное произведение (∇f) x ⋅ v градиента в точке x с вектором v дает производную по направлению от f в точке x в направлении v. Отсюда следует, что в этом случае градиент f является ортогональным к наборам уровня f. Например, поверхность уровня в трехмерном пространстве определяется уравнением вида F (x, y, z) = c. Тогда градиент F нормален к поверхности.
В более общем смысле любая встроенная гиперповерхность в риманово многообразие может быть вырезана уравнением вида F (P) = 0, так что dF нигде не равно нулю.. Тогда градиент F нормален к гиперповерхности.
Аналогично, аффинная алгебраическая гиперповерхность может быть определена уравнением F (x 1,..., x n) = 0, где F - полином. Градиент F равен нулю в особой точке гиперповерхности (это определение особой точки). В неособой точке это ненулевой нормальный вектор.
Градиент функции называется градиентным полем. (Непрерывное) поле градиента всегда является консервативным векторным полем : его линейный интеграл вдоль любого пути зависит только от конечных точек пути и может быть вычислен с помощью градиентной теоремы ( основная теорема исчисления для линейных интегралов). И наоборот, (непрерывное) консервативное векторное поле всегда является градиентом функции.
Матрица Якоби - это обобщение градиента для векторнозначных функций нескольких переменных и дифференцируемых карт между евклидовыми пробелы или, в более общем смысле, многообразия. Дальнейшее обобщение функции между банаховыми пространствами - это производная Фреше.
Поскольку полная производная векторного поля является линейным отображением от векторов к векторам, это тензор величина.
В прямоугольных координатах градиент векторного поля f = (f, f, f) определяется следующим образом:

(где используется нотация суммирования Эйнштейна, а тензорное произведение векторов eiи ekравно диадический тензор типа (2,0)). В целом, это выражение равно транспонированной матрице Якоби:

В криволинейных координатах или, в более общем смысле, на изогнутом многообразии градиент включает символы Кристоффеля :

где g - компоненты обратного метрического тензора , а ei- координатные базисные векторы.
Выражаясь более инвариантно, градиент векторного поля f может быть определен связью Леви-Чивиты и метрическим тензором:

, где ∇ c - соединение.
Для любой гладкой функции f на римановом многообразии (M, g) градиент f - это векторное поле ∇f такое, что для любого вектора поле X,

то есть

где g x (,) обозначает внутреннее произведение касательных векторов в точке x, определенных метрикой g и ∂ X f - функция, которая переводит любую точку x ∈ M в производную f по направлению в направлении X, вычисленную в x. Другими словами, в координатной карте φ от открытого подмножества M до открытого подмножества R, (∂ X f) (x) задается по:

где X обозначает j-й компонент X в этой координатной диаграмме.
Итак, локальная форма градиента принимает вид:

Обобщение случая M = R, градиент функции связан с ее внешней производной, поскольку

Точнее, градиент ∇f - это векторное поле, связанное с дифференциалом 1 -form df, используя музыкальный изоморфизм

(называемые «точными»), определяемые метрикой g. Связь между внешней производной и градиентом функции на R является частным случаем этого, в котором метрика является плоской метрикой, заданной скалярным произведением.
| На Викискладе есть материалы, связанные с Градиентными полями. |
| Искать градиент в Викисловаре, бесплатный словарь. |