Векторный оператор, производящий скалярную величину потока в точке

Дивергенция различных векторных полей. Дивергенция векторов из точки (x, y) равна сумме частной производной по x компоненты x и частной производной по y компоненты y в этой точке. точка:

В векторном исчислении дивергенция - это векторный оператор, который работает с векторным полем , создавая скалярное поле , задающее количество источников векторного поля в каждой точке. Более технически дивергенция представляет собой объемную плотность внешнего потока векторного поля из бесконечно малого объема вокруг данной точки.
В качестве примера рассмотрим воздух, нагретый или охлаждаемый. скорость воздуха в каждой точке определяет векторное поле. В то время как воздух нагревается в какой-либо области, он расширяется во всех направлениях, и, таким образом, поле скорости указывает наружу из этой области. Таким образом, расхождение поля скорости в этой области будет иметь положительное значение. Пока воздух охлаждается и сжимается, отклонение скорости имеет отрицательное значение.
Содержание
- 1 Физическая интерпретация дивергенции
- 2 Определение
- 3 Определение в координатах
- 3.1 Декартовы координаты
- 3.2 Цилиндрические координаты
- 3.3 Сферические координаты
- 3.4 Тензорное поле
- 3.5 Общие координаты
- 4 Свойства
- 5 Теорема разложения
- 6 Связь с внешней производной
- 7 Обобщения
- 8 См. Также
- 9 Примечания
- 10 Цитаты
- 11 Ссылки
- 12 Внешние ссылки
Физическая интерпретация дивергенции
С физической точки зрения дивергенция векторного поля - это степень, в которой поток векторного поля ведет себя как источник в данной точке. Это локальная мера его «исходящего» - степени, в которой больше векторов поля выходит из бесконечно малой области пространства, чем входит в нее. Точка, в которой исходит поток, имеет положительную дивергенцию и часто называется «источником» поля. Точка, в которой поток направлен внутрь, имеет отрицательную дивергенцию и часто называется «стоком» поля. Чем больше поток поля через небольшую поверхность, охватывающую данную точку, тем больше величина расхождения в этой точке. Точка, в которой поток через ограничивающую поверхность равен нулю, имеет нулевую дивергенцию.
Дивергенция векторного поля часто иллюстрируется на примере поля скорости текучей среды, жидкости или газа. Движущийся газ имеет скорость, скорость и направление в каждой точке, которые могут быть представлены вектором , поэтому скорость газа образует векторное поле. Если газ нагреть, он расширится. Это вызовет чистое движение частиц газа во всех направлениях. Любая замкнутая поверхность в газе будет окружать газ, который расширяется, поэтому через поверхность будет выходить поток газа наружу. Таким образом, поле скоростей везде будет иметь положительную дивергенцию. Точно так же, если газ охлаждается, он сжимается. В любом объеме будет больше места для частиц газа, поэтому внешнее давление жидкости вызовет чистый поток объема газа внутрь через любую закрытую поверхность. Поэтому поле скорости везде имеет отрицательную дивергенцию. В отличие от ненагретого газа с постоянной плотностью, газ может двигаться, но объемная скорость газа, втекающего на любую закрытую поверхность, должна равняться объемной скорости истечения, поэтому чистый поток жидкости через любую закрытую поверхность равен нулю. Таким образом, скорость газа везде имеет нулевую дивергенцию. Поле, которое повсюду имеет нулевую дивергенцию, называется соленоидным.
. Если жидкость нагревается только в одной точке или небольшой области, или вводится небольшая трубка, которая обеспечивает источник дополнительной жидкости в одной точке, жидкость там будет расширяться, толкая частицы жидкости вокруг себя во всех направлениях. Это вызовет направленное наружу поле скорости во всей жидкости с центром в нагретой точке. Любая замкнутая поверхность, окружающая нагретую точку, будет иметь поток частиц жидкости, выходящих из нее, поэтому в этой точке есть положительное расхождение. Однако любая замкнутая поверхность, не охватывающая точку, будет иметь постоянную плотность жидкости внутри, так что столько же частиц жидкости входит и выходит из объема, таким образом, чистый поток из объема равен нулю. Следовательно, расхождение в любой другой точке равно нулю.
Определение
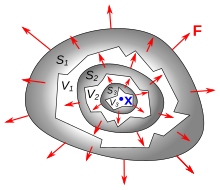
Дивергенция в точке x - это предел отношения потока

через поверхность S i (красные стрелки) в объем

для любой последовательности замкнутых областей V 1, V 2, V 3... охватывающий x, который приближается к нулевому объему:.

Дивергенция векторного поля F(x) в точке x0определяется как предел отношения интеграла поверхности of F из поверхности замкнутого объема V, заключающего x0в объем V, когда V сжимается до нуля




где | V | - объем V, S (V) - граница V, а n̂ - внешняя единичная нормаль к этой поверхности. Можно показать, что указанный выше предел всегда сходится к одному и тому же значению для любой последовательности объемов, содержащих x0и приближающихся к нулевому объему. Результат, div F, является скалярной функцией x.
. Поскольку это определение не содержит координат, оно показывает, что расхождение одинаково в любой системе координат . Однако практически не используется для расчета дивергенции; когда векторное поле задано в системе координат, определения координат ниже намного проще использовать.
Векторное поле с нулевой дивергенцией везде называется соленоидальным - в этом случае любая замкнутая поверхность не имеет суммарного потока через нее.
Определение в координатах
Декартовы координаты
В трехмерных декартовых координатах, расхождение непрерывно дифференцируемого векторного поля  определяется как скалярная -значная функция:
определяется как скалярная -значная функция:

Хотя выражено в терминах координат результат инвариантен относительно поворотов, как предполагает физическая интерпретация. Это связано с тем, что след матрицы Якоби N-мерного векторного поля F в N-мерном пространстве инвариантен относительно любого обратимого линейного преобразования.
Обычное обозначение дивергенции ∇ · F - удобная мнемоника, где точка обозначает операцию, напоминающую скалярное произведение : возьмите компоненты ∇ (см. del ), примените их к соответствующим компонентам F и просуммируйте результаты. Поскольку применение оператора отличается от умножения компонентов, это считается злоупотреблением обозначением.
Цилиндрические координаты
Для вектора, выраженного в локальных единицах цилиндрических координатах как

где ea- единичный вектор в направлении a, расходимость составляет

Использование локальных координат жизненно важно для правильности выражения. Если мы рассмотрим x вектор положения и функции  ,
,  и
и  , которым присваивается соответствующий global цилиндрическая координата к вектору, как правило,
, которым присваивается соответствующий global цилиндрическая координата к вектору, как правило,  ,
,  и
и  . В частности, если мы рассмотрим функцию идентичности
. В частности, если мы рассмотрим функцию идентичности  , мы обнаружим, что :
, мы обнаружим, что :
 .
.
Сферические координаты
В сферических координатах, где θ - угол с осью z, а φ - вращение вокруг оси z, и  снова записано в координатах местных единиц, расхождение составляет
снова записано в координатах местных единиц, расхождение составляет

Тензорное поле
Пусть  будет непрерывно дифференцируемым тензорным полем второго порядка, определенным следующим образом:
будет непрерывно дифференцируемым тензорным полем второго порядка, определенным следующим образом:

расхождение в декартовой системе координат является тензорным полем первого порядка и может быть определено двумя способами:

и

У нас есть

Если тензор симметричный  , затем
, затем  и это причина того, что часто в литературе это два определения (и символы
и это причина того, что часто в литературе это два определения (и символы  и
и  ) переключаются и взаимозаменяемы (особенно в уравнениях механики, где предполагается тензорная симметрия).
) переключаются и взаимозаменяемы (особенно в уравнениях механики, где предполагается тензорная симметрия).
Выражения  в цилиндрических и сферических координатах приведены в статье del в цилиндрических и сферические координаты.
в цилиндрических и сферических координатах приведены в статье del в цилиндрических и сферические координаты.
Общие координаты
Используя нотацию Эйнштейна, мы можем рассмотреть расхождение в общих координатах, которые мы записываем как x,..., x,..., x, где n - количество измерений области. Здесь верхний индекс относится к номеру координаты или компонента, поэтому x относится ко второму компоненту, а не к величине x в квадрате. Переменная индекса i используется для ссылки на произвольный элемент, например x. Затем расхождение можно записать с помощью формулы Voss - Weyl, как:

где  - местный коэффициент элемента объема, а F - компоненты F относительно локального ненормализованногоковариантного базиса (иногда записывается как
- местный коэффициент элемента объема, а F - компоненты F относительно локального ненормализованногоковариантного базиса (иногда записывается как  ). Обозначение Эйнштейна подразумевает суммирование по i, так как оно выступает как верхний, так и нижний индекс.
). Обозначение Эйнштейна подразумевает суммирование по i, так как оно выступает как верхний, так и нижний индекс.
Объемный коэффициент является функцией положения, которое зависит от системы координат. В декартовых, цилиндрических и сферических координатах, используя те же соглашения, что и раньше, мы имеем  ,
,  и
и  соответственно. Это также может быть выражено как
соответственно. Это также может быть выражено как  , где
, где  - это метрический тензор. Поскольку определитель является скалярной величиной, не зависящей от индексов, мы можем подавить их и просто написать
- это метрический тензор. Поскольку определитель является скалярной величиной, не зависящей от индексов, мы можем подавить их и просто написать  . Другое выражение получено в результате вычисления определителя якобиана для преобразования из декартовых координат, что для n = 3 дает
. Другое выражение получено в результате вычисления определителя якобиана для преобразования из декартовых координат, что для n = 3 дает 
Некоторые соглашения предполагают, что все локальные базовые элементы будут нормализованы до единичной длины, как это было сделано в предыдущих разделах. Если мы напишем  для нормализованного базиса и
для нормализованного базиса и  для компонентов F относительно него, мы имеем, что
для компонентов F относительно него, мы имеем, что

с использованием одного из свойств метрического тензора. Расставив точки с обеих сторон последнего равенства с контравариантным элементом  , мы можем заключить, что
, мы можем заключить, что  . После замены формула принимает следующий вид:
. После замены формула принимает следующий вид:
 .
.
См. § Обобщения для дальнейшего обсуждения.
Свойства
Все следующие свойства могут быть получены из обычных правил дифференцирования исчисления. Что наиболее важно, дивергенция - это линейный оператор, то есть

для всех векторных полей F и G и все действительные числа a и b.
Существует правило произведения следующего типа: если φ - скалярная функция, а F - векторное поле, то

или в более понятной записи

Другой Правило произведения для перекрестного произведения двух векторных полей F и G в трех измерениях включает curl и читается следующим образом:

или

лапласиан скалярного поля - это дивергенция градиента :

Дивергенция curl любого векторного поля (в трех измерениях) равна ноль:

Если векторное поле F с нулевой дивергенцией определено на шаре в R, то существует некоторое векторное поле G на шаре с F = curl G . Для областей в R более топологически сложных, чем это, последнее утверждение может быть ложным (см. лемму Пуанкаре ). Степень несостоятельности утверждения, измеряемая гомологией цепного комплекса

служит хорошей количественной оценкой сложности основной области U. Это начало и основные мотивы когомологии де Рама.
Теорема разложения
Можно показать, что любой стационарный поток v(r), дважды непрерывно дифференцируемый в R и достаточно быстро исчезающий при | r | → ∞ можно однозначно разложить на вихревую часть E(r) и часть без источника B(r). Более того, эти части явно определяются соответствующими плотностями источников (см. Выше) и плотностями циркуляции (см. Статью Curl ):
Для безвихревой части

с

Часть без исходного кода, B, можно записать аналогично: нужно только заменить скалярный потенциал Φ (r ) на векторный потенциал A(r), а члены −∇Φ на + ∇ × A, а плотность источника div v на плотность циркуляции ∇ × v.
Эта «теорема разложения» является побочным продуктом стационарного случая электродинамики. Это частный случай более общего разложения Гельмгольца, которое также работает в размерностях больше трех.
Связь с внешней производной
Можно выразить дивергенцию как частный случай внешней производной, которая принимает форму 2 в форму 3 в R . Определите текущую двойную форму как

Он измеряет количество «материала» протекающий через поверхность в единицу времени в «заполняющей жидкости» плотности ρ = 1 dx ∧ dy ∧ dz, движущейся с локальной скоростью F . Его внешняя производная dj тогда определяется как

Таким образом, дивергенция векторного поля F можно выразить как:

Здесь верхний индекс ♭ - это один из двух музыкальных изоморфизмов, а ⋆ - звездный оператор Ходжа. Работать с текущей двумерной формой и внешней производной обычно проще, чем с векторным полем и дивергенцией, поскольку в отличие от дивергенции внешняя производная коммутирует с изменением (криволинейной) системы координат.
Обобщения
Дивергенция векторного поля может быть определена в любом количестве измерений. Если

в евклидовой системе координат с координатами x 1, x 2,..., x n определите

Соответствующее выражение более сложное в криволинейных координатах.
В случае одного измерения F сводится к регулярной функции, а расхождение сводится к производной.
Для любого n дивергенция является линейным оператором и удовлетворяет «правилу произведения»

для любого скалярного значная функция φ.
Дивергенция векторного поля естественным образом распространяется на любое дифференцируемое многообразие размерности n, которое имеет форму объема (или плотность ) μ, например риманово или лоренцево многообразие. Обобщая конструкцию двойки для векторного поля на R, на таком многообразии векторное поле X определяет (n - 1) -форму j = i X μ, полученную стягивая X с μ. Тогда дивергенция - это функция, определяемая как

Стандартные формулы для производной Ли позволяют переформулировать это как

Это означает, что дивергенция измеряет скорость расширения элемента объема, когда мы позволяем ему поток с векторным полем.
На псевдоримановом многообразии дивергенция относительно формы метрического объема может быть вычислена в терминах связи Леви-Чивиты ∇:

где второе выражение представляет собой сжатие векторного поля со значением 1-формы ∇X с самим собой, а последнее выражение является традиционным выражением координат из исчисления Риччи.
Эквивалентным выражением без использования соединения является

где g - метрика, а ∂ a обозначает частную производную по координате x.
Дивергенция также может быть обобщена на тензоры. В нотации Эйнштейна дивергенция контравариантного вектора F определяется как

где ∇ μ обозначает ковариантную производную.
Эквивалентно, некоторые авторы определяют дивергенцию смешанный тензор с использованием музыкального изоморфизма ♯: если T является (p, q) - тензором (p для контравариантного вектора и q для ковариантного), то мы определяем дивергенцию T как (p, q - 1) -тензор

то есть берем след по первым двум ковариантным индексам ковариантной производной
См. Также
Примечания
Цитаты
Ссылки
- Брюэр, Джесс Х. (1999). «РАЗНООБРАЗИЕ векторного поля». musr.phas.ubc.ca. Архивировано с оригинального 23 ноября 2007 г. Проверено 9 августа 2016 г. CS1 maint: ref = harv (ссылка )
- Рудин, Уолтер (1976). Принципы математического анализа. McGraw-Hill. ISBN 0-07-054235-X. CS1 maint: ref = harv (ссылка )
- Эдвардс, CH (1994). Расширенное исчисление нескольких переменных. Mineola, NY : Dover. ISBN 0-486-68336-2. CS1 maint: ref = harv (link )
- Гуртин, Мортон (1981). Введение to Механика сплошной среды. Academic Press. ISBN 0-12-309750-9. CS1 maint: ref = harv (ссылка )
- Тереза, М. Корн ; Korn, Granino Arthur (январь 2000 г.). Математический справочник для ученых и инженеров: определения, теоремы и формулы для справки и обзора. Нью-Йорк: Dover Publications, стр. 157–160. ISBN 0-486-41147-8. CS1 maint: ref = harv (ссылка )
Внешние ссылки
 | Викискладе есть медиафайлы, связанные с энциклопедией Дивергенция. |

 Дивергенция различных векторных полей. Дивергенция векторов из точки (x, y) равна сумме частной производной по x компоненты x и частной производной по y компоненты y в этой точке. точка:
Дивергенция различных векторных полей. Дивергенция векторов из точки (x, y) равна сумме частной производной по x компоненты x и частной производной по y компоненты y в этой точке. точка:  Дивергенция в точке x - это предел отношения потока
Дивергенция в точке x - это предел отношения потока 