
Войти
В линейной алгебре транспонирование матрицы - это оператор, который переворачивает матрица по диагонали; то есть он переключает индексы строки и столбца матрицы A, создавая другую матрицу, часто обозначаемую A (среди других обозначений).
Транспонирование матрица была представлена в 1858 году британским математиком Артуром Кэли.
Транспонирование матрицы A, обозначаемый A,A′,A, Aили A, может быть построен любым из следующих методов:
Формально, i-я строка, j-й элемент столбца A - это j-я строка, элемент i-го столбца A:
![{\ displaystyle \ left [\ mathbf {A} ^ {\ operatorname {T}} \ right] _ {ij} = \ left [\ mathbf {A} \ right] _ {ji}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b0864ad54decb7f1b251512de895b40545facf5)
Если A - это матрица размера m × n, тогда A - это матрица размера n × m. Чтобы не путать читателя между операцией транспонирования и матрицей, возведенной в степень t, символ A обозначает операцию транспонирования.
Квадратная матрица, транспонирование которой равно самой себе, называется симметричной матрицей ; то есть A является симметричным, если

Квадратная матрица, транспонирование которой равно отрицательному, называется кососимметричной матрицей ; то есть A является кососимметричным, если

Квадратная комплексная матрица, транспонирование которой равно матрице с заменой каждой записи на его комплексно сопряженное (обозначено здесь с чертой) называется эрмитовой матрицей (эквивалентно матрице, равной ее сопряженному транспонированию ); то есть A эрмитово, если

Квадратная комплексная матрица, транспонирование которой равно отрицанию его комплексно сопряженная матрица называется косоэрмитовой матрицей ; то есть A является косоэрмитовым, если

Квадратная матрица, транспонирование которой равно ее инверсии называется ортогональной матрицей ; то есть A ортогонален, если

Квадратная комплексная матрица, транспонирование которой равно ее сопряженной обратной, называется унитарная матрица ; то есть, A унитарен, если




Пусть A и B - матрицы, а c - скаляр.





![{ \ displaystyle \ left [\ mathbf {a} \ cdot \ mathbf {b} \ right] = \ mathbf {a} ^ {\ operatorname {T}} \ mathbf {b},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/df7fe45515e81c3a4160801b7f9658f3a84af1b8)

Если A является матрицей m × n и A является ее транспонированным, тогда результат умножения матриц с этими двумя матрицами дает две квадратные матрицы: AA - m × m, а AA- n × n. Кроме того, эти продукты представляют собой симметричные матрицы. Действительно, матричное произведение A A имеет элементы, которые являются внутренним продуктом строки A со столбцом A . Но столбцы A являются строками A, поэтому запись соответствует внутреннему произведению двух строк A . Если p i j является записью продукта, оно получается из строк i и j в A . Запись p ji также получается из этих строк, таким образом, p ij = p ji, и матрица произведения (p ij) симметрично. Точно так же произведение AAпредставляет собой симметричную матрицу.
Быстрое доказательство симметрии A A следует из того факта, что это собственное транспонирование:

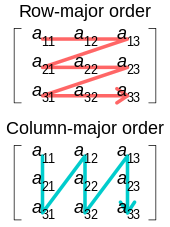 Иллюстрация порядка строк и столбцов
Иллюстрация порядка строк и столбцов На компьютере часто можно избежать явного транспонирования матрицы в памяти, просто обратившись к те же данные в другом порядке. Например, программные библиотеки для линейной алгебры, такие как BLAS, обычно предоставляют опции для указания того, что определенные матрицы должны интерпретироваться в транспонированном порядке, чтобы избежать необходимости движения данных.
Однако остается ряд обстоятельств, при которых необходимо или желательно физически переупорядочить матрицу в памяти в соответствии с ее транспонированным порядком. Например, с матрицей, хранящейся в порядке старших строк, строки матрицы являются смежными в памяти, а столбцы не смежными. Если над столбцами необходимо выполнить повторяющиеся операции, например, в алгоритме быстрого преобразования Фурье, транспонирование матрицы в памяти (чтобы сделать столбцы смежными) может улучшить производительность за счет увеличения локальности памяти.
В идеале можно было бы надеяться транспонировать матрицу с минимальным дополнительным объемом памяти. Это приводит к проблеме транспонирования матрицы размера n × m на место с дополнительным хранилищем O (1) или, самое большее, хранилищем, намного меньшим, чем mn. Для n ≠ m это включает сложную перестановку элементов данных, которую нетривиально реализовать на месте. Поэтому эффективная перестановка матрицы на месте была предметом многочисленных исследовательских публикаций в информатике, начиная с конца 1950-х годов, и было разработано несколько алгоритмов.
Напомним, что матрицы могут быть помещены во взаимно однозначное соответствие с помощью линейных операторов. Транспонирование линейного оператора может быть определено без необходимости рассматривать его матричное представление. Это приводит к гораздо более общему определению транспонирования, которое может быть применено к линейным операторам, которые не могут быть представлены матрицами (например, с участием многих бесконечномерных векторных пространств).
Пусть X обозначает алгебраическое двойственное пространство модуля R- X. Пусть X и Y - R-модули. Если u: X → Y является линейным отображением, то его алгебраическое сопряженное или двойственное отображение u: Y → X, определенное формулой f ↦ f ∘ ты Результирующий функционал u (f) называется pullback функции f по u. Следующее соотношение характеризует алгебраическое сопряженное к u
, где ⟨ •, •⟩ - это естественная пара (т.е. определенная как ⟨z, h⟩: = h (z)). Это определение также без изменений применяется к левым модулям и векторным пространствам.
Можно видеть, что определение транспонирования не зависит от какой-либо билинейной формы модулей, в отличие от сопряженного (ниже).
непрерывное двойственное пространство топологического векторного пространства (TVS) X обозначается X '. Если X и Y являются TVS, то линейное отображение u: X → Y слабо непрерывно тогда и только тогда, когда u (Y ') ⊆ X', и в этом случае мы обозначим u: Y '→ X' ограничение u на Y '. Отображение u называется транспонированием u.
Если матрица A описывает линейную карту относительно баз V и W, то матрица A описывает транспонирование этого линейное отображение относительно двойственных базисов .
Любое линейное отображение в двойственное пространство u: X → X определяет билинейную форму B: X × X → F с соотношение B (x, y) = u (x) (y). Определив транспонирование этой билинейной формы как билинейную форму B, определенную транспонированием u: X → X, т.е. B (y, x) = u (Ψ (y)) (x), мы находим, что B (x, y) = В (у, х). Здесь Ψ - естественный гомоморфизм X → X в двойное двойственное.
Если векторные пространства X и Y имеют соответственно невырожденный билинейные формы BXи B Y, понятие, известное как сопряженное, которое тесно связано с транспонированием, может быть определено:
Если u : X → Y - это линейное отображение между векторными пространствами X и Y, мы определяем g как сопряженное к u, если g: Y → X удовлетворяет
 для всех x ∈ X и y ∈ Y.
для всех x ∈ X и y ∈ Y.Эти билинейные формы определяют изоморфизм между X и X, и между Y и Y, что приводит к изоморфизму между транспонированным и присоединенным к u. Матрица сопряженной карты является транспонированной матрицей только в том случае, если базы являются ортонормированными по отношению к их билинейным формам. В этом контексте многие авторы используют термин транспонировать для обозначения сопряженного, как определено здесь.
Сопряженное позволяет нам определить, равно ли g: Y → X u: Y → X. В частности, это позволяет ортогональной группе над векторным пространством X с квадратичной формой быть определенным без ссылки на матрицы (или их компоненты) как набор всех линейных отображений X → X, для которых сопряженное равно обратному.
В сложном векторном пространстве часто работают с полуторалинейными формами (сопряженно-линейными с одним аргументом) вместо билинейных форм. Эрмитово сопряженное соединение карты между такими пространствами определяется аналогично, а матрица эрмитова сопряженного элемента задается сопряженной транспонированной матрицей, если базисы ортонормированы.