
Войти
 Изменение ориентации твердого тела аналогично вращение осей привязанной к нему системы отсчета.
Изменение ориентации твердого тела аналогично вращение осей привязанной к нему системы отсчета. В геометрии ориентация, угловое положение, положение или направление объекта, такого как линия линия, плоскость или твердое тело. часть описания того, как он размещается в занимаемом пространстве. Более конкретно, это относится к воображаемому повороту, который необходим для перемещения объекта из исходного положения в его текущее положение. Ротации может быть недостаточно для достижения текущего места размещения. Может потребоваться добавить воображаемый перевод, называемый местоположением объекта (или положением, или линейным положением). Расположение и ориентация вместе полностью описывают, как объект размещается в пространстве. Вышеупомянутые воображаемое вращение и перемещение можно считать происходящими в любом порядке, поскольку ориентация объекта не изменяется при перемещении, и его положение не изменяется при повороте.
Теорема Эйлера о вращении показывает, что в трех измерениях любая ориентация может быть достигнута с помощью одного вращения вокруг фиксированной оси. Это дает один общий способ представления ориентации с использованием представления ось – угол. Другие широко используемые методы включают в себя кватернионы вращения, углы Эйлера или матрицы вращения. Более специализированное использование включает индексы Миллера в кристаллографии, простирания и падения в геологии и степень на картах и знаках. Единичный вектор также может использоваться для представления ориентации вектора нормали объекта.
Обычно ориентация задается относительно системы отсчета, обычно задаваемой декартовой системой координат.
Как правило, положение и ориентация в пространстве твердого тела определяются как положение и ориентация относительно основной ссылки фрейм другой системы отсчета, которая фиксирована относительно тела и, следовательно, перемещается и вращается вместе с ней (локальная система отсчета тела или локальная система координат). Для описания ориентации этого локального кадра необходимы как минимум три независимых значения. Три других значения описывают положение точки на объекте. Во время вращения все точки тела меняют свое положение, кроме тех, которые лежат на оси вращения. Если твердое тело имеет вращательную симметрию, не все ориентации можно различить, за исключением наблюдения за тем, как ориентация изменяется во времени от известной начальной ориентации. Например, ориентация в пространстве отрезка line, отрезка линии или вектора может быть указана только двумя значениями, например двумя направляющими косинусами . Другой пример - положение точки на Земле, часто описываемое с помощью ориентации линии, соединяющей ее с центром Земли, измеряемой с использованием двух углов долготы и широты. Аналогичным образом, ориентация плоскости может быть описана двумя значениями, например, путем указания ориентации прямой нормали к этой плоскости или с помощью углов простирания и падения..
Более подробная информация о математических методах представления ориентации твердых тел и плоскостей в трех измерениях дана в следующих разделах.
В двух измерениях ориентация любого объекта (линии, вектора или плоской фигуры ) задается одним значением: угол, на который он повернулся. Есть только одна степень свободы и только одна фиксированная точка, вокруг которой происходит вращение.
Было разработано несколько методов для описания ориентации твердого тела в трех измерениях. Они кратко изложены в следующих разделах.
 Углы Эйлера, один из возможных способов описания ориентации
Углы Эйлера, один из возможных способов описания ориентации Первая попытка представить ориентацию была предпринята Леонардом Эйлером. Он представил три системы отсчета, которые могут вращаться одна вокруг другой, и понял, что, начав с фиксированной системы отсчета и выполнив три вращения, он может получить любую другую систему отсчета в пространстве (используя два поворота для фиксации вертикальной оси и еще одну для зафиксируйте две другие оси). Значения этих трех поворотов называются углами Эйлера.
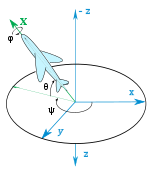
 углами Тейта – Брайана. Другой способ описания ориентации
углами Тейта – Брайана. Другой способ описания ориентации Это три угла, также известные как рыскание, тангаж и крен, углы навигации и углы кардана. Математически они представляют собой набор из шести возможных внутри двенадцати возможных наборов углов Эйлера, причем порядок является наиболее подходящим для описания ориентации транспортного средства, такого как самолет. В аэрокосмической технике их обычно называют углами Эйлера.
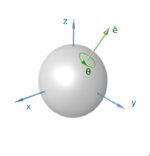 Вращение, представленное осью Эйлера и углом.
Вращение, представленное осью Эйлера и углом. Эйлер также понял, что сочетание двух вращений эквивалентно одному вращению вокруг другой фиксированной оси (вращение Эйлера теорема ). Следовательно, композиция первых трех углов должна быть равна только одному вращению, ось которого было сложно вычислить до тех пор, пока не были разработаны матрицы.
Основываясь на этом факте, он ввел векторный способ описания любого вращения, с вектором на оси вращения и модулем, равным значению угла. Следовательно, любая ориентация может быть представлена вектором вращения (также называемым вектором Эйлера), который ведет к нему из системы отсчета. При использовании для представления ориентации вектор вращения обычно называют вектором ориентации или вектором ориентации.
Аналогичный метод, называемый представление угла оси, описывает поворот или ориентацию с использованием единичного вектора, выровненного с осью вращения, и отдельного значения для обозначения угол (см. рисунок).
С введением матриц теоремы Эйлера были переписаны. Вращения описывались ортогональными матрицами , называемыми матрицами вращения или матрицами направляющих косинусов. При использовании для представления ориентации матрицу поворота обычно называют матрицей ориентации или матрицей ориентации.
Вышеупомянутый вектор Эйлера является собственным вектором матрицы вращения (матрица вращения имеет уникальное действительное собственное значение ). Произведение двух матриц вращения - это композиция вращений. Следовательно, как и раньше, ориентация может быть задана как поворот от исходного кадра для достижения кадра, который мы хотим описать.
Конфигурационное пространство несимметричного объекта в n-мерном пространстве - это SO (n) × R. Ориентацию можно визуализировать, прикрепив к объекту основу из касательных векторов . Направление, в котором указывает каждый вектор, определяет его ориентацию.
Другой способ описания вращения - использование кватернионов вращения, также называемых версорами. Они эквивалентны матрицам вращения и векторам вращения. Что касается векторов вращения, их легче преобразовать в матрицы и из них. При использовании для представления ориентации кватернионы вращения обычно называют кватернионами ориентации или кватернионами ориентации.
 Плоскости с разными индексами Миллера в кубических кристаллах
Плоскости с разными индексами Миллера в кубических кристаллах Положение плоскости решетки - это ориентация линии перпендикулярно плоскости, и описывается самолетными индексами Миллера. В трехмерном пространстве семейство плоскостей (серия параллельных плоскостей) может быть обозначено его индексами Миллера (hkl), поэтому семейство плоскостей имеет общее для всех составляющих его плоскостей.
 Предел и наклон плоскости, описывающей положение относительно горизонтальной плоскости и вертикальной плоскости, перпендикулярной линии простирания
Предел и наклон плоскости, описывающей положение относительно горизонтальной плоскости и вертикальной плоскости, перпендикулярной линии простирания Многие объекты, наблюдаемые в геологии, являются плоскостями или линиями, и их ориентация обычно называется их отношением. Эти отношения задаются двумя углами.
Для линии эти углы называются трендом и падением. Тренд - это направление линии по компасу, а наклон - это угол вниз, который она образует с горизонтальной плоскостью.
Для плоскости два угла называются ее простиранием (углом) и ее падением (углом). Линия простирания - это пересечение горизонтальной плоскости с наблюдаемым плоским элементом (и, следовательно, горизонтальной линией), а угол простирания - это направление этой линии (то есть относительно географического севера или от магнитный север ). Угол наклона - это угол между горизонтальной плоскостью и наблюдаемым плоским элементом, наблюдаемый в третьей вертикальной плоскости, перпендикулярной линии простирания.
 Ориентация твердого тела определяется тремя углами
Ориентация твердого тела определяется тремя углами Положение твердого тела - это его ориентация, как описано, например, ориентация закрепленной в теле рамки относительно неподвижной системы отсчета. Позиция описывается координатами позиции и состоит как минимум из трех координат. Одна схема ориентирования твердого тела основана на вращении осей тела; последовательные три вращения вокруг осей фиксированной системы отсчета тела, тем самым устанавливая углы Эйлера тела. Другой основан на крен, тангаж и рыскание, хотя эти термины также относятся к постепенным отклонениям от номинального положения
... положение плоскости или линии, то есть ее ориентация в пространстве, является фундаментальным для описания структур.
Положение твердого тела под углом Эйлера.