
Войти
 Точка в трехмерном евклидовом пространстве может быть размещена по трем координатам.
Точка в трехмерном евклидовом пространстве может быть размещена по трем координатам. Евклидово пространство - фундаментальное пространство классической геометрии. Первоначально это было трехмерное пространство евклидовой геометрии, но в современной математике существуют евклидовы пространства любого неотрицательного целого измерения, включая трехмерное пространство и евклидову плоскость (измерение два). Он был введен древнегреческим математиком Евклидом Александрийским, и квалификатор евклидово используется, чтобы отличить его от других пространств, которые позже были обнаружены в физике и современной математике.
Древние греческие геометры представили евклидово пространство для моделирования физической вселенной. Их большим нововведением было доказать все свойства пространства как теоремы, исходя из нескольких фундаментальных свойств, называемых постулатами, которые считались очевидными (например, существует ровно одна прямая, проходящая через две точки), или казалось невозможным доказать (параллельный постулат ).
После введения в конце 19 века неевклидовой геометрии старые постулаты были повторно формализованы, чтобы определить евклидовы пространства с помощью аксиоматической теории. Было показано другое определение евклидовых пространств с векторных пространств и линейной алгебры эквивалентно аксиоматическому определению. Именно это определение чаще используется в современной математике и подробно описано в этой статье.
Во всех определениях евклидовы пространства состоят из точек, которые имеют только те свойства, которые они имеют для образования евклидова пространства. Космос.
По сути, существует только одно евклидово пространство каждого измерения; то есть все евклидовы данного пространства размерности изоморфны. Поэтому во многих случаях можно работать с конкретным евклидовым пространством, которое обычно является реальным пространством 

Евклидово пространство было введено древними греками как абстракция нашего физическое пространство. Великое нововведение, появившееся в Элементах Евклида, заключено в том, чтобы построить и доказать всю геометрию, исходя из нескольких основных свойств, которые абстрагированы от физического мира и не могут быть доказаны математически, потому что из-за отсутствия более простых инструментов. Эти свойства называются постулатами или аксиомами на современном языке. Этот способ определения евклидова пространства до сих пор используется под названием синтетическая геометрия.
. В 1637 году Рене Декарт ввел показал координаты декартовы, что позволяет увидеть геометрические проблемы. к алгебраическим вычислениям с числами. Это сокращение геометрии до алгебры было серьезным изменением точки зрения, так как до тех пор действительные числа действительные числа - то есть рациональные числа и не- рациональные числа вместе - были выявлены с точки зрения геометрии, как длина и расстояние.
Евклидова геометрия не применялась в пространствех более чем трех измерений до 19 века. Людвиг Шлефли обобщил евклидову геометрию на пространства n измерений, используя как синтетические, так и алгебраические методы, и открыл все регулярные многогранники (многомерные аналоги Платоновых тел ), которые существуют в евклидовых пространствах любого числа измерений.
Несмотря на широкое использование подхода Декарта, который назывался аналитической геометрией, определение евклидова пространства оставалось неизменным до конца 19 века. Введение абстрактных векторных пространств позволяет их использовать при определении евклидовых пространств с чисто алгебраическим определением. Было показано, что это новое определение эквивалентно классическому определению в терминах геометрических аксиом. Именно это алгебраическое определение сейчас чаще всего используется для введения евклидовых пространств.
Один из способов представить евклидову плоскость - это набор из точек, удовлетворяющих определенным отношениям, выражаемым в терминах расстояния и углов. Например, на плоскости выполняются две основные операции (называемые движения ). Один из них - смещение, что означает смещение плоскости таким образом, что каждая точка смещается в одном направлении и на одинаковое расстояние. Другой - поворот вокруг фиксированной точки на плоскости, при которой все точки плоскости поворачиваются вокруг этой фиксированной точки на один и тот же угол. Один из основных принципов евклидовой геометрии состоит в том, что две фигуры (обычно рассматриваемые как подмножества ) плоскости должны считаться эквивалентными (конгруэнтными ), если одна может быть преобразована в другую последовательность перемещений, вращений и отражений (см. ниже).
Чтобы все это было математически точным, теория должна четко определить, что такое евклидово пространство, и связанные с ним понятия расстояния, угла, перемещения и вращения. Даже при использовании в физические теориях евклидово пространство абстракцию, отделенную от реальных местоположений, системного отсчета, измерительных инструментов и так далее. Чисто математическое определение евклидова пространства также игнорирует вопросы о толщине и других измерениях : расстояние в «математическом» измерении - это число, а не что-то выраженное в мермах или метров.
Стандартный способ математического определения евклидова пространства, как это сделано в оставшейся части этой статьи, состоит в том, чтобы определить евклидово пространство как набор точек, на которые действует a реальное пространство, пространство переводов, снабженное внутренним продуктом . Действие трансляций делает пространство аффинным пространством, и это позволяет определять линии плоскости, подпространства, размер и параллелизм. Внутренний продукт позволяет определять и углы.
Набор
Отсюда, что все, что можно сказать о евклидовом пространстве, можно сказать и о 
Причина для введения такого абстрактного определения евклидовых пространств и для работы с ним
A Евклидово векторное пространство - это новое пространство внутреннее пространство продукта над действительными числами.
A Евклидово пространство - это аффинное пространство над вещественным числом, так что связанное пространство является евклидовым векторным пространством. Евклидовы пространства иногда называют евклидовыми аффинными пространствами, чтобы отличить их от евклидовых векторных пространств.
E - евклидово часто пространство, связанное с ним пространство обозначается 
Элементы E называются точками и обычно обозначаются заглавными буквами. Элементы 
Действие сдвига v на точку P дает точку, которая обозначается P + v. Это действие удовлетворяет условию

(Вторая + в левой части векторным сложным; все остальные + обозначают точку на точку. Это обозначение не является двусмысленным, поскольку для различения двух значений + достаточно взглянуть на природу его левого аргумента.)
Тот факт, что действие является свободным и транзитивным, означает, что для каждой пары точек (P, Q) существует ровно один вектор v такой, что P + v = Q. Этот вектор v обозначается Q - P или
Как объяснялось ранее, некоторые из основных свойств евклидовых пространств структуры аффинного пространства. Они развивают в § Аффинная структура и ее подразделах. Свойства, полученные в результате внутреннего продукта, объясняются в § Метрическая структура и ее подразделах.
Для любого проститивного пространства действует и свободно в самом простом простом пространстве. Таким образом, евклидово пространство можно рассматривать как евклидово пространство как само ассоциируется с векторным пространством.
Типичным случаем евклидова пространства является
Гран-Евклидово пространство размерности n изоморфно ему, евклидово
Некоторые основные свойства евклидова зависят только от того факта, что евклидово пространство является аффинным пространством. Они называются аффинными свойствами и включают концепции линий, подпространств и параллелизма. которые подробно в следующих подразделах.
Пусть E - евклидово пространство, а
Плоское евклидово подпространство или аффинное подпространство E - это такое подмножество F в E, что

- это линейное подпространство в 
Если точка является точкой F, то

И наоборот, если P - точка в E, а V - линейное подпространство из 

- евклидово подпространство направления V.
Евклидово Новое пространство (то есть евклидово пространство такое, что 
В евклидовом направлении линии - это евклидово подпространство размерности один. Линия представляет собой набор вида

где P и Q - две разные точки.
Отсюда следует, что есть ровно одна линия, которая проходит (содержит) две различные точки. Это означает, что две различные прямые пересекаются не более чем в одной точке.
Более симметричное представление прямой, проходящей через P и Q:

где O - произвольная точка (не обязательно на линию).
В евклидовом векторном пространстве нулевой вектор обычно выбирается для O; это позволяет упростить предыдущую формулу до

Стандартное соглашение позволяет использовать эту формулу в любом евклидовом пространстве, см. Аффинный пробел § Аффинные комбинации и барицентр.
Отрезок , или просто сегмент, соединяющий точки P и Q, подмножеством точек, таких что 0 ≤ λ ≤ 1 в предыдущих формулах. Обозначается PQ или QP; то есть

Два подпространства S и T того же измерения в евклидовом параллельны, если они имеют одинаковое направление. Эквивалентно, они параллельны, если есть вектор сдвига v, отображает один в другой:

Для точки P и подпространства S существует ровно одно подпространство, содержащее P и параллельное S, то есть 
Отсюда следует, что в Евклидова плоскость, две прямые либо пересекаются в одной точке, либо параллельны.
Концепция параллельных подпространств была распространена на подпространства разных размеров: два подпространства параллельны, если направление одного из них совпадает с направлением другим.
Векторное пространство

то есть положительно определенное ( то есть 
Внутреннее произведение евклидова пространства часто называют скалярным произведением и обозначают x ⋅ y. Это верно в случае выбрана <17>декартова система координат, поскольку в этом случае внутреннее произведение двухов скалярным произведением их особенно векторов координат. Используется эта причина и по исторической причине точечная запись, чем скобка для внутренних произведений евклидовых пространств. Эта статья будет следовать этому использованию; то есть 
Евклидова норма вектор x равна

Внутренний продукт и позволяет выразить и доказать все метрики и топологические свойства евклидовой геометрии. В следующем эффе самые основные из них. В этих подразделах E обозначает произвольное евклидово пространство, а
Расстояние (точнее, евклидово расстояние) между двумя точками евклидова пространства - это вектор переноса пространства, который отображает одну точку в другую; то есть

Длина сегмента PQ - это расстояние d (P, Q) между его конечными точками. Его часто обозначают | PQ |,
Расстояние - это метрика, так как оно удовлетворяет треугольному неравенству

Более того, равенство истинно тогда и только тогда, когда R принадлежит сегменту PQ. Это неравенство означает, что длина любой ребра треугольника меньше суммы длин других ребер. Отсюда возник термин треугольное неравенство.
При евклидовом расстоянии каждого евклидово пространство представляет собой полное метрическое пространство.
Два ненулевых вектора u и v из

Два линейных подпространства
Две линии и в более общем смысле, два евклидовых подпространства ортогональны, если их направление ортогонально. Две пересекающиеся ортогональные прямые называются перпендикулярными.
Два сегмента AB и AC, которые имеют общую конечную точку, перпендикулярны или образуют прямой угол, если конструкция 

Если AB и AC образуют прямой угол, получается

Это теорема Пифагора. Его доказательство в этом контексте легко, поскольку мы получаем, используя билинейность и внутреннее произведение:

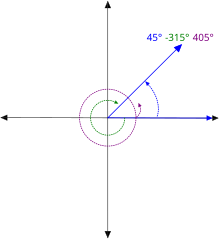 Положительные и отрицательные углы на ориентированной плоскости
Положительные и отрицательные углы на ориентированной плоскости Угол (неориентированный) θ между двумя ненулевыми векторами x и y в

где arccos - главное значение функции arccosine. Согласно неравенству Коши - Шварца аргумент арккосинуса находится в интервале [–1, 1]. Следовательно, θ вещественно, и 0 ≤ θ ≤ π (или 0 ≤ θ ≤ 180}, если углы измеряются в градусах).
Углы не используются в евклидовой прямой, так как они могут быть только 0 или π.
В ориентированной евклидовой плоскости можно определить ориентированный угол двухов. Ориентированный угол двух векторов x и y противоположен ориентированного угла y и x. В этом случае угол двух векторов может иметь любое значение по модулю, целое кратное 2π. В частности, угол отражения π < θ < 2π equals the negative angle –π < θ – 2π < 0.
Угол двух векторов не изменяется, если они умножаются на положительные числа. Точнее, если x и y - два вектора, а λ и μ - действительные числа, то

Если A, B и C - три точки в евклидовом пространстве, угол отрезков AB и AC равных векторов 
Угол двух прямых определяется следующим образом. Если θ - угол двух сегментов, по одному на прямой каждый, угол любого другого прямого сегмента, равенство либо θ, либо π - θ. Один из этих углов находится в интервале [0, π / 2], а другой - в [π / 2, π]. Неориентированный угол двух линий - это угол в интервале [0, π / 2]. В ориентированной евклидовой плоскости ориентированный угол двух прямых принадлежит интервалу [–π / 2, π / 2].
Новое евклидово векторное пространство имеет ортонормированный базис (на самом деле, бесконечно много в размерности больше единицы и два в измерении один), то есть база 





Для евклидова пространства E декартова система отсчета представляет собой набор данных, состоящий из ортонормированного базиса 
Декарты координаты вектора v - это коэффициенты перед v на основе 
Декарты, координаты точки P из E являются декартовыми координатами вектора
 Трехмерные косые координаты
Трехмерные косые координаты Временное евклидово пространство аффинным пространством, можно рассмотреть аффинный фрейм на нем, который совпадает с евклидовым фреймом, за исключением того, что не требуется, чтобы базис был ортонормированным. Это определяет аффинные координаты, иногда называемые косыми координатами, чтобы подчеркнуть, что базисные координаты не являются попарно ортогональными.
аффинный базис евклидова пространства размерности n - это набор из n + 1 точек, не используетсяся в гиперплане. Аффинный базис определяет барицентрические координаты для каждой точки.
Многие другие системы координат могут быть определены в евклидовом пространстве E размерности следующим образом. Пусть f будет гомеоморфизмом (или, чаще, диффеоморфизмом ) от плотного открытого подмножества E до открытого подмножества
Для точек, которые находятся за пределами области, координаты могут иногда определяться как предел координат соседних точек, но эти координаты могут быть однозначно не непрерывными в окрестности точки. Например, для сферической системы координат долгота не определена на полюсе, а на антимеридиане долгота скачкообразно изменяется от –180 ° до + 180 °.
Этот способ определения легко распространяется на другие математические структуры, в частности разнообразие.
изометрия между двумя метриками пробелы - это биекция, сохраняющая расстояние, то есть

В случае евклидова пространства изометрия, которая отображает начало координат в начало географ, сохран норму

, поскольку нормой даты является его расстояние от нулевого вектора. Он также включает внутренний продукт

с

Евклидовы ориентиры пространства изометрии - это линейный изоморфизм.
Изометрия 


является изометрией евклидовых пространств.
Это из предыдущих результатов, что изометрия евклидовых пространств отображает прямые в прямом и в более общем смысле, евклидовы подпространства в евклидовы подпространства той же размерности, и что ограничение изометрии на эти подпространства изометрия этих подпространств.
Если E - евклидово пространство, связанное с ним внутреннее пространство

, которая отображает O в нулевой вектор и имеет тождество как ассоциированное линейная карта. Обратная изометрия - это отображение

Евклидова рамка

, которое является изометрией евклидовых пространств. Обратная изометрия:

Это означает, что с точностью до изоморфизма существует ровно одно евклидово пространство данной размерности.
Это оправдывает то, что многие авторы говорят о
Изометрия евклидова пространство на себя называется евклидовой изометрией, евклидовым преобразованием или жестким преобразованием. Жесткие преобразования евклидова пространства образуют группу (в составе ), называемую состав евклидовой группы и часто обозначаемую E (n) из ISO (n).
Простейшие евклидовы преобразования - это переводы

Они находятся в биективном согласно с векторами. Это то пространство называется причиной пространным пространством, внутренним евклидовым пространством. Переводы образуют нормальную подгруппу евклидовой группы.
Евклидова изометрия f евклидова пространства E определяет линейную изометрию 


Несложно доказать, что это линейное отображение, которое не зависит от выбор О.
Отображение 
Изометрии, фиксирующие данную точку P, образуют стабилизирующую подгруппу евклидовой группы относительно P. Ограничение на этот стабилизатор вышеуказанного гомоморфизма групп является изоморфизмом. Таким образом, изометрии, фиксирующие данную точку, образуют группу, изоморфную ортогональной группе.
Пусть P - точка, f - изометрия, а t - перевод, который отображает P в f (P). Изометрия 

Специальная ортогональная группа является нормальной подгруппой ортогональной группы, которая сохраняет хиральность. Это подгруппа индекса два ортогональной группы. Его прообраз по гомоморфизму группы
Жесткие движения включают в себя идентичность, смещения, вращения (жесткие движения, фиксирующие по крайней мере точку), а также винтовые движения.
Типичные примерами жестких преобразований, которые не являются жесткими движениями, являются отражения, которые представляют собой жесткие преобразования, фиксирующие гиперплоскость и не являющиеся тождеством. Это также преобразования, заключающиеся в изменении знака одной координаты в некоторой евклидовой системе отсчета.
Поскольку особая евклидова группа является подгруппой два евклидовой группы, каждое жесткое преобразование, которое является не жестким движением, является произведением r и жестким движением. Отражение скольжения - это пример жесткого преобразования, которое не является жестким движением или отражением.
Все группы, которые были рассмотрены в этом разделе, являются группами Ли и алгебраическими группами.
Евклидово расстояние делает евклидово пространство метрическое пространство и, следовательно, топологическое пространство. Эта топология называется евклидовой топологией. В случае
открытыми множествами - это подмножества, содержащие открытый шар вокруг каждой из своих точек. Другими словами, открытые шары образуют основу топологии.
. Топологическая размерность евклидова пространства равна его размерности. Это означает, что евклидовы пространства разных размерностей не гомеоморфны. Более того, теорема инвариантности области утверждает, что подмножество евклидова пространства открыто (для топологии подпространства ) тогда и только тогда, когда оно гомеоморфно открытому подмножеству евклидова пространства. пространство того же измерения.
Евклидовы пространства полны и локально компактны. То есть замкнутое подмножество евклидова пространства компактно, если оно ограничено (то есть содержится в шаре). В частности, замкнутые шары компактны.
Определение евклидовых пространств, описанное в этой статье, в корне отличается от определения Евклида. В действительности Евклид не давал определения пространству формально, потому что он задумывался как описание физического мира, существующего независимо от человеческого разума. Потребность в формальном определении возникла только в конце 19 века, с введением неевклидовой геометрии.
Были использованы два разных подхода. Феликс Кляйн предложил определять геометрию через их симметрии. Представление евклидовых пространств, приведенное в этой статье, по существу выпущено из его Эрлангенской программы, с акцентом на группы переводов и изометрий.
С другой стороны, Дэвид Гильберт набор аксиом, вдохновленный постулатами Евклида. Они относятся к синтетической геометрии, поскольку не содержат определения действительных чисел. Позже Г. Д. Биркгоф и Альфред Тарский предложили более простые наборы аксиом, в которых используются действительные числа (см. аксиомы Биркгофа и аксиомы Тарского ).
В Геометрической алгебре, Эмиль Артин доказал, что все эти определения евклидова пространства эквивалентны. Довольно доказать, что все определения евклидовых пространств удовлетворяют аксиомам Гильберта и что определение легко доказать действительные числа (включая данное выше определение), эквивалентны. Сложность доказательства Артина заключается в следующем. В аксиомах Гильберта конгруэнтность - это отношение эквивалентности на отрезках. Таким образом, можно определить рейтинг сегмента как его класс эквивалентности. Таким образом, необходимо доказать, что эта длина удовлетворяет свойстваам, которые характеризуют неотрицательные действительные числа. Это то, что сделал Артин, с аксиомами, которые не принадлежат Гильберту, но эквивалентны.
Начало с древних греков, евклидово пространство используется для моделирования форм в физическом мире. Таким образом, он используется во многих науках, таких как физика, механика и астрономия. Он также широко используется во всех технических областях, связанных с формами, фигурами, местоположением и положением, такими как архитектура, геодезия, топография, навигация, промышленный образец или технический чертеж.
Пространство размеров трех различных в нескольких современных теориях физики; см. Высшее измерение. Они также встречаются в конфигурационных пространствах физических систем.
Помимо евклидовой геометрии, евклидовы пространства также широко используются в других областях математики. Касательные пространства к дифференцируемым векторным разнообразием являются евклидовыми пространствами. В более общем смысле многообразие - это пространство локально аппроксимируется евклидовыми пространствами. Большинство неевклидовых геометрий можно смоделировать с помощью множества вложений и в евклидово пространство более высокой размерности. Например, эллиптическое пространство можно смоделировать с помощью эллипсоида . В математике евклидова пространства допускаются объекты, которые априори не имеют геометрической природы. Примером среди многих является обычное представление графов.
. С момента введения в конце 19 века неевклидовой геометрии многие виды пространств, которые можно делать геометрические рассуждения так же, как и с евклидовыми пространствами. В общем, они имеют общие свойства с евклидовыми пространствами, но могут также иметь свойства, которые могут показаться довольно странными. Некоторые из этих пространств используют евклидову геометрию для своего определения или могут быть смоделированы как подпространства евклидова пространства более высокого измерения. Когда такое пространство определено геометрическими аксиомами, встраивание пространства в евклидово пространство является стандартным способом доказательства его определения, или, точнее, для доказательства того, что его теория непротиворечива, если евклидова геометрия непротиворечива (что не может быть доказано).
Евклидово пространство - это аффинное пространство, снабженное метрикой. У аффинных пространств есть много других применений в математике. В частности, они позволяют использовать любые поля , позволяют выполнять геометрию в другом контекстах.
После нелинейных вопросов обычно полезно рассматривать аффинные пространства над комплексными числами как расширение евклидовых пространств. Например, круг и линия всегда имеют две точки пересечения (возможно, не разные) в сложном аффинном изображении. Следовательно, большая часть алгебраической геометрии построена в сложных аффинных пространствах и аффинных пространствах над алгебраически замкнутыми полями. Формы, которые изучаются в алгебраической геометрии в этих аффинных пространствах, называются аффинными алгебраическими числами.
аффинными пространствами над рациональными и в более общем смысле над полямираическими числами с помощью связь между (алгебраической) геометрией и теорией чисел. Например, Последняя теорема Ферма может быть сформулирована как «кривая Ферма степень выше двух неэффективных точек в аффинной плоскости над рациональными числами».
Геометрия в аффинных пространствах над конечными полями также широко изучалась. Например, эллиптические кривые над конечными полями широко используются в криптографии.
Первоначально проективные кривые были введены путем добавления «точек на бесконечности « в евклидовы пространства и, в более общем смысле, в аффинные пространства, чтобы утверждение «две копланарные линии пересекались ровно в одной точке». Проективное пространство разделяет с евклидовым и аффинным пространством свойствами быть изотропным, то есть у свойств пространства нет, позволяющего различать две точки или две прямые. Поэтому обычно используется более изотропное определение, которое заключается в определении проективного пространства как набора векторных линий в векторном пространстве размерности еще один.
Что касается аффинных пространств, проективные пространства над любым полем и основными пространствами алгебраической геометрии614>Неевклидовой геометрии<12>Не- Евклидова геометрия обычно относится к геометрическим пространствам, где постулат параллельности неверен. Они включают эллиптическую геометрию, где сумма углового треугольника больше 180 °, и гиперболическая геометрия, где эта сумма меньше 180 °. Их введение во второй половине XIX века и доказательство того, что их теория непротиворечива (если евклидова геометрия не противоречит), является одним из парадоксов, лежащих в основе фундаментального кризиса в математика начала ХХ века, и мотивировала систематизацию аксиоматических теорий в математике.
A размерие - это пространство, которое в окрестностях каждой точки напоминает евклидово пространство. С технической точки зрения - это топологическое пространство, такое, что каждая точка имеет типичность, гомеоморфна открытое подмножеству евклидово пространство. Многообразие можно классифицировать по возрастной степени этого «сходства» на топологические многообразия, дифференцируемые многообразия, гладкие многообразия и аналитические многообразия. Однако ни один из этих типов «сходства» не учитывает сведения и углы, даже приблизительно.
Расстояния и углы могут быть использованы на гладком фоне с помощью плавно меняющейся евклидовой метрики на касательных пространств в точках разнообразия (эти касательные, такие, Евклидовы ресурсы). В результате получается риманово разнообразие. Обычно прямые не существуют в римановом множестве, но их роль играют геодезическими, которые являются «кратчайшими путями» между двумя точками. Это позволяет измерять расстояния, которые измеряются вдоль геодезических, и углы между геодезическими, которые обеспечивают собой угол их касательного расстояния на их пересечении. Итак, римановы многообразия локально ведут себя как изогнутые евклидовы.
Евклидовы пространства - тривиально римановы многообразия. Примером, хорошо иллюстрирующим это, является поверхность сферы. В этом случае геодезические - это дуги большого круга, которые называются ортодромами в контексте навигации. В более общем смысле, пространстве неевклидовой геометрии могут быть реализованы как римановы многообразия.
Внутренний продукт , определяющий евклидовы пространства, является положительно установленным билинейной формой. Если его заменить на неопределенную квадратичную форму, которая является невырожденной, получится псевдоевклидово пространство.
Основным примером такого пространства является пространство Минковского, которое пространством-временем из специальной теории относительности Эйнштейна . Это четырехмерное пространство, в котором определяется квадратичная форма

где последняя координата (t) является временной, а остальные три (x, y, z) пространственными.
Чтобы принять во внимание гравитацию, общая теория относительности использует псевдориманово многообразие, в пространстве которого Минковского являются касательными. кривизна этого множества в точке является функцией значения гравитационного поля в этой точке.
Шлефли... открыл их до 1853 года - время, когда Кэли, Грассман и Мёбиус были единственными людьмиCS1 maint: ref = harv (ссылка )


