Дискретная (т.е. инкрементальная) версия исчисления бесконечно малых
Дискретное исчисление или исчисление дискретных функций - это математическое исследование проверенных изменений, точно так же, как геометрия - это изучение, формы алгебра - изучение обобщений арифметические операции. Слово «исчисление» - это латинское слово, используем означающее «маленький камешек»; Такие камешки использовались для расчетов, значение этого слова изменилось и сегодня обычно означает метод расчета. Между тем, исчисление, используем называвшееся исчислением бесконечно малых или «исчислением бесконечно малых », является исследованием непрерывных изменений.
Дискретное исчисление имеет две точки входа: дифференциальное исчисление и интегральное исчисление. Дифференциальное исчисление касается возрастающих темпов изменений и наклонов кусочно-линейных кривых. Интегральное исчисление касается накопления величин и площадей под кусочно-постоянными кривыми. Эти две точки зрения связаны друг с другом основным теоремой дискретного исчисления.
Изучение концепций изменения начинается с их дискретной формы. Развитие зависит от проекта, приращения  переменной. Мы можем делать приращение все меньше и меньше и находить непрерывные аналоги этих концепций в качестве пределов. Неформально предел дискретного исчисления как
переменной. Мы можем делать приращение все меньше и меньше и находить непрерывные аналоги этих концепций в качестве пределов. Неформально предел дискретного исчисления как  - это исчисление бесконечно малых. Несмотря на то, что оно используется для дискретной исчисления, основная ценность дискретного исчисления заключается в приложениях.
- это исчисление бесконечно малых. Несмотря на то, что оно используется для дискретной исчисления, основная ценность дискретного исчисления заключается в приложениях.
Содержание
- 1 Две исходные конструкции
- 2 История
- 3 Приложения
- 4 Вычисление разностей и сумм
- 5 Цепи симплексов и кубов
- 6 Дискретные дифференциальные формы: коцепи
- 7 Произведение клина форм
- 8 Оператор Лапласа
- 9 Связанные
- 10 См. Также
- 11 Ссылки
Две исходные конструкции
Дискретное дифференциальное исчисление - это исследование определения, свойства и применения разностного коэффициента функции. Процесс нахождения коэффициента разности называется дифференцированием. Для данной точки прямой в точках реальной, коэффициент разности в этой точке является способ кодирования мелкомасштабного (то есть есть от точки к следующей) функции поведения. Коэффициент разности функций в каждой паре определяемых точек в ее области определения. Формально коэффициент разности - это линейный оператор , который принимает функцию в качестве входных данных и производит вторую функцию в качестве выходных данных. Это более абстрактно, чем многие процессы, изучаемые в элементарной алгебре, где функции обычно вводят число и выводят другое число. Например, если функция удвоения дан вход три, то она выдает шесть, если функция возведения в квадрат - вход три, то она выдает девять. Однако производная может принимать функцию возведения в квадрат в качестве входных данных. Это означает, что производная принимает все функции возведения в квадрат, например, как два отправления на шестьдесят четыре, как показано на рисунке. Функция, полученная путем дифференцирования функции возведения в квадрат, оказывается чем-то близким к функциям удвоения.
Предположим, что функции в точках, разделенных приращением  :
:

«Функция удвоения» может обозначаться как  и "функция возведения в квадрат" на
и "функция возведения в квадрат" на  . «Коэффициент разности» - это скорость изменения функции на одном из интервалов
. «Коэффициент разности» - это скорость изменения функции на одном из интервалов ![{\ displaystyle [x, x + h]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6273c65efb7394e51a3d13a2575cac8b4f184a1b) определяет формулой:
определяет формулой:

В качестве входных данных он принимает функцию  , то есть всю информацию, например, что два отправляются на четыре, три отправляются на д евять, четыре отправляются на шестнадцать. и так далее - a nd использует эту информацию для вывода другие функции, функции
, то есть всю информацию, например, что два отправляются на четыре, три отправляются на д евять, четыре отправляются на шестнадцать. и так далее - a nd использует эту информацию для вывода другие функции, функции  , как выясняется. Для удобства указанное выше интервалов:
, как выясняется. Для удобства указанное выше интервалов:

Временная скорость изменения что для всего интервала любая точка внутри него может быть какой-то один в качестве ссылки или, что еще лучше, весь интервал, составляющий коэффициент разности a  -cochain.
-cochain.
Наиболее распространенное обозначение коэффициента разности:

Если входные данные показывают изменение времени, то коэффициент разницы представляет изменение времени. Например, если - функция, которая принимает данные в качестве входных данных и выдает положение мяча в это время в качестве выходных, тогда коэффициент разности - это то, как позиция изменяется во времени, то есть скорость мяча.
Если функция является линейной (то есть, если точки графика функции лежат на прямой линии), то функцию можно записать как  , где
, где  - независимая переменная,
- независимая переменная,  - зависимая переменная,
- зависимая переменная,  - -перехват, и:
- -перехват, и:

Это дает точное значение для наклона прямая линия.
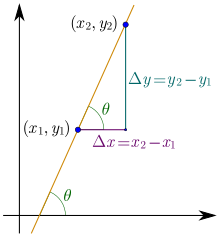
Наклон:

Однако, если функция не является линейной, тогда изменение , деленное на изменение меняется. Коэффициент разницы дает точное значение понятию изменения выпуска по отношению к изменению на входе. Чтобы быть конкретным, пусть будет функция, и зафиксируйте точку в домене .  - точка на графике функции. Если
- точка на графике функции. Если  является приращением , то
является приращением , то  - следующее значение . Следовательно,
- следующее значение . Следовательно,  - это приращение . Наклон линии между этими двумя точками равенство
- это приращение . Наклон линии между этими двумя точками равенство

Итак,  - это наклон линии между и .
- это наклон линии между и .
Вот частный пример, коэффициент разности функции возведения в квадрат. Пусть - функция возведения в квадрат. Тогда:

Фактор разности отношений разности называется вторым частным разности, и он определяется в

И так далее.
Дискретное интегральное исчисление - это исследование определений, свойств и приложений сумм Римана. Процесс нахождения суммы называется интегрированием. Выражаясь техническим языком, интегральное исчисление изучает определенный линейный оператор .
. Сумма Римана вводит функцию и выводит функцию, которая дает алгебраическую сумму площадей между частями ввода и ось x.
Хорошим примером являются расстояния, пройденные за данный момент.

Если скорость постоянна, требуется только умножение, но если скорость, мы оцениваем пройденное расстояние, разбивая время на множестве коротких интервалов времени, затем умножая время, прошедшее в каждом интервале, на одну из скоростей в этом интервале, а вычисляя сумму (a Сумма Римана ) расстояния, пройденного за каждый интервал.
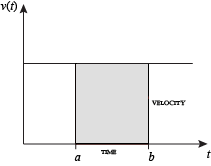
Постоянная скорость

Сумма Римана измеряет общую площадь полос, определяемую параметром
, между двумя точками (здесь

и
).
Когда скорость постоянна, общее расстояние, пройденное за заданный интервал времени, можно вычислить, умножив скорость и время. Например, путешествие по устойчивому При 50 милях в час в течение 3 На диаграмме слева, когда изображены постоянная скорость и время, эти два значения образуют прямоугольник с высотой, равной скорости, и шириной, равной прошедшему времени. Эта связь между кривой и пройденным расстоянием может быть распространена на любую область неправильной формы, постоянно изменяющуюся скорость в течение заданного периода времени. права изменяют скорость, изменяется от интервала к следующему, пройденное расстояние (между временами, представленными и ) равно область закрашенной области  .
.
Итак, интервал между и делится на равных сегментов, индивидуально представлен символом . Для каждого небольшого сегмента у нас есть одно значение функции  . Назовите это значение
. Назовите это значение  . Тогда площадь прямоугольника с основанием и высотой дает расстояние (время , умноженное на скорость ), пройденное в этом сегменте. С каждой сегментированной функцией, находящейся над ним,
. Тогда площадь прямоугольника с основанием и высотой дает расстояние (время , умноженное на скорость ), пройденное в этом сегменте. С каждой сегментированной функцией, находящейся над ним,  . Сумма всех прямоугольников дает площадь между осью и кусочно-постоянной кривой, которая представляет собой общее пройденное расстояние.
. Сумма всех прямоугольников дает площадь между осью и кусочно-постоянной кривой, которая представляет собой общее пройденное расстояние.
Предположим, функция определена в середине интервалов одинаковой длины :

Затем сумма Римана от до  в сигма-нотации :
в сигма-нотации :

Мексика это вычисление выполняется для каждого  , новая функция определено в точках:
, новая функция определено в точках:
фундаментальная теорема исчисления утверждает, что дифференцирование и интегрирование обратной обратной операцией. ции. Точнее, он связывает разностные коэффициенты с суммой Римана. Это также может быть истолковано как точное утверждение того факта.
Основная теорема исчисления: если функция определена в разделе интервала ![[a, b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935) , , и если
, , и если  - функция, Коэффициент разности равенства , тогда мы имеем:
- функция, Коэффициент разности равенства , тогда мы имеем:

Кроме того, для каждые  , мы имеем:
, мы имеем:

Это также прототип решения разностного уравнения. Разностные уравнения связывают неизвестную функцию с ее разностью или разностным коэффициентом и повсеместно в науках.
История
Ранняя история дискретного исчисления - это история математического анализа. Такие основные идеи, как разностные коэффициенты и суммы Римана, неявно или явно присутствуют в определениях и доказательствах. Однако после того, как лимит исчерпан, их больше никогда не увидят. Однако закон напряжения Кирхгофа (1847) может быть выражен через одномерную дискретную внешнюю производную.
В течение 20 века дискретное исчисление постоянно связано с исчислением бесконечно малых, особенно с дифференциальными формами, но также начинает исходить из алгебраической топологии по мере развития обоих. Основные вклады внесли следующие люди:
- Анри Пуанкаре : триангуляции (барицентрическое подразделение, двойная триангуляция ), лемма Пуанкаре, первое доказательство общей теоремы Стокса и многое другое
- L. Э. Дж. Брауэр : теорема симплициальной аппроксимации
- Эли Картан, Жорж де Рам формы : понятие дифференциальной, внешняя производная как координата- независимый линейный оператор, точность / замкнутость форм
- Эмми Нётер, Хайнц Хопф, Леопольд Вьеторис, Вальтер Майер : модули из цепочек, граничный оператор, цепные комплексы
- J. В. Александр, Соломон Лефшец, Лев Понтрягин, Андрей Колмогоров, Норман Стинрод, Эдуард Чех : ранние понятия коцепи
- Герман Вейль : законы Кирхго, сформулированные в терминах граничных и кограничных операторов
- W. В. Д. Ходж : звездный оператор Ходжа, разложение Ходжа
- Сэмюэл Эйленберг, Сондерс Мак-Лейн, Норман Стинрод, JHC Уайтхед : тщательное развитие теории гомологии и когомологии, включая комплексы цепей и коцепей, чашечный продукт
- Хасслер-Уитни : коцепи как интегранты
Недавнее развитие дискретного исчисления, начиная с Уитни, было обусловлено потребностями прикладного моделирования.
приложений
Дискретное исчисление используется для моделирования прямо или косвенно как дискретизация бесконечно малых исчисление во всех отраслях физических наук, актуарная наука, информатика, статистика, инженерия, экономика, бизнес, медицина, демография и в других областях, где проблема может быть математически смоделирована. Это позволяет перейти от (непостоянных) темпов изменений к полному изменению или наоборот, и много раз, изучая проблему, мы знаем одну и пытаемся найти.
Физика особенно использует математические вычисления; все дискретные концепции в классической механике и электромагнетизме связаны посредством дискретного исчисления. масса объекта известной плотности, которая изменяется постепенно, момент инерции таких объектов, а также полная энергия объекта в дискретном исчислении можно найти с помощью дискретного исчисления. Пример использования дискретного исчисления в механике является второй закон движения Ньютона : исторически утверждается, что он явно использует термин «изменение движения», который подразумевает коэффициент разности: «Изменение количества движения равно равнодействующей силе, действующей на теле». и направленной в том же направлении. Сегодня обычно выражается как Сила = Масса × Ускорение, он дискретное исчисление, когда изменение является инкрементным, потому что ускорение - это коэффициент разности скорости по времени или второй коэффициент разности пространственного положения. Зная, как объект ускоряется, мы используем Римана для его определения пути.
Теория электромагнетизма Максвелла и теория общей относительности Эйнштейна были выражены на языке дискретного исчисления.
Химия использует расчет для определения скорости и радиоактивного распада (экспоненциальный распад ).
В биологии популяционная динамика начинается с воспроизводства и смертности для моделирования популяционных изменений (популяционное моделирование ).
В технике разностные уравнения для использования построения курса космического корабля в условиях невесомости, для моделирования теплопередачи, диффузии, и распространение волнений.
Дискретное Теорема Грина используется в инструменте, известном как планиметр, который используется для вычислений площади плоской поверхности на чертеже. Например, его можно использовать для расчета площади, занимаемой клумбой неправильной формы или плавательного бассейна, при проектировании планировки участка. Его можно использовать для вычисления размера области изображения на, чтобы быстро извлекать особенности и обнаруживать объект; другой алгоритм, который может быть использован, - это таблица суммированных площадей .
. В области медицины расчет может использоваться для нахождения оптимального угла разветвления кровеносного сосуда, чтобы максимизировать поток. Из законов распада для выведения определенного лекарства из организма он используется для получения законов дозирования. В ядерной медицине он используется для построения моделей переноса излучения при целенаправленной терапии опухолей.
В экономике расчет позволяет определять максимальную прибыль путем расчета предельных затрат и предельных доходов, а также моделирования рынков.
Дискретное исчисление может использоваться в сочетании с другими математическими дисциплинами. Например, его можно использовать в теории вероятностей для определения вероятности дискретной случайной величины из предполагаемой функции плотности.
Вычисление разностей и сумм
Предположим, что функция (a  -cochain) определяется в точках, разделенных приращением :
-cochain) определяется в точках, разделенных приращением :
Разница (или внешняя производная, или кограничный оператор) функция задается следующим образом:
![{\ displaystyle {\ big (} \ Delta f {\ big)} {\ big (} [x, x + h] {\ big)} = f (x + h) -f (x).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4639719ac3bbeceb510def0959cf7865152acde5)
Он определяется в каждом из вышеуказанных интервалов; это -cochain.
Предположим, что -cochain  определяется в каждом из вышеуказанных интервалов. Тогда он s сумма - это функция (a -cochain), определяемая в каждой из точек следующим образом:
определяется в каждом из вышеуказанных интервалов. Тогда он s сумма - это функция (a -cochain), определяемая в каждой из точек следующим образом:
![{\ displaystyle \ left (\ sum g \ right) (a + nh) = \ sum _ {i = 1} ^ {n} g {\ big (} [a + (i-1) h, a + ih] {\ big) }.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d1d29da1d26bd1530cb17dc1bb4bedadecf39eb0)
Это их свойства:
- Постоянное правило : Если
 является константой, тогда
является константой, тогда

- Линейность : если и - константы,



- Основная теорема исчисления II :

Определения применяются к графам следующим образом. Если функция (a -cochain) определена в узлах графа:

, тогда его внешняя производная (или дифференциал) является разницей, то есть следующей функцией, определенной на краях графа (-cochain):
![{\ displaystyle \ left (df \ right) {\ big (} [a, б] {\ большой)} = е (б) -f (а).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ccdf6027da45bbfd75afabc5ad3d2a9fc74bacf3)
Если - это -cochain, тогда его интеграл по последовательности ребер  графика - это сумма его значений по всем ребрам («интеграл по путям»):
графика - это сумма его значений по всем ребрам («интеграл по путям»):
![{\ displaystyle \ int _ {\ sigma} g = \ sum _ {\ sigma} g {\ big (} [a, b] {\ big)}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/07b71a2b77f35207d5ad69554e9b78bb8dd04b95)
Это свойства:
- Постоянное правило : если является константой, то

- Линейность : если и являются константами,,


- Основная теорема исчисления I : если a - цепочка состоит из ребер
![{\ displaystyle [a_ {0}, a_ {1}], [a_ {1}, a_ {2}],..., [a_ {n-1}, a_ {n}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/358dce5a125a52d5ee73a13d96d96d2b9e065859) , затем для любого -cochain
, затем для любого -cochain

- Основная теорема исчисления II : если график дерево, - это -cochain, а функция (-cochain) определяется в узлах графа как

где -цепочка состоит из ![{\ displaystyle [a_ {0}, a_ {1}], [a_ {1}, a_ {2}],..., [a_ { n-1}, x]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/674d7a6a0863151d7b6de2aed5d56f1b36ee9f76) для некоторого фиксированного
для некоторого фиксированного  , затем
, затем

См. Ссылки.
Цепочки симплексов и кубов
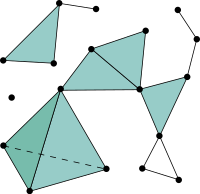
Симплициальный комплекс.
A симплициальный комплекс  - это набор симплексов, которые удовлетворяет следующим условиям:
- это набор симплексов, которые удовлетворяет следующим условиям:
- 1. Каждая грань симплекса из также находится в .
- 2. Непустое пересечение любых двух симплексов
 является гранью обоих
является гранью обоих  и
и  .
.

Граница берется граница 2-симплекса (слева) и граница 1-цепи (справа). Оба равны 0, являясь суммой, в которой как положительное, так и отрицательное значение 0-симплекса встречаются один раз. Граница границы всегда равна 0. Нетривиальный цикл - это то, что замыкается, как граница симплекса, в том смысле, что его граница равна 0, но на самом деле это не граница симплекса или цепи.
По По определению ориентация k-симплекса задается упорядочением вершин, записанным как  , с правилом, что два порядка определяют одну и ту же ориентацию тогда и только тогда, когда они отличаются четной перестановкой. Таким образом, каждый симплекс имеет ровно две ориентации, и изменение порядка двух вершин меняет ориентацию на противоположную. Например, выбор ориентации 1-симплекса означает выбор одного из двух возможных направлений, а выбор ориентации 2-симплекса означает выбор того, что должно означать «против часовой стрелки».
, с правилом, что два порядка определяют одну и ту же ориентацию тогда и только тогда, когда они отличаются четной перестановкой. Таким образом, каждый симплекс имеет ровно две ориентации, и изменение порядка двух вершин меняет ориентацию на противоположную. Например, выбор ориентации 1-симплекса означает выбор одного из двух возможных направлений, а выбор ориентации 2-симплекса означает выбор того, что должно означать «против часовой стрелки».
Пусть будет симплициальным комплексом. симплициальная k-цепь - это конечная формальная сумма

, где каждый c i является целым числом, а σ i является ориентированным k-симплексом. В этом определении мы заявляем, что каждый ориентированный симплекс равен негативу симплекса с противоположной ориентацией. Например,

Векторное пространство k-цепочек на записывается как  . Он имеет основу во взаимно однозначном соответствии с набором k-симплексов в . Чтобы явно определить базис, нужно выбрать ориентацию каждого симплекса. Один из стандартных способов сделать это - выбрать порядок всех вершин и задать каждому симплексу ориентацию, соответствующую индуцированному порядку его вершин.
. Он имеет основу во взаимно однозначном соответствии с набором k-симплексов в . Чтобы явно определить базис, нужно выбрать ориентацию каждого симплекса. Один из стандартных способов сделать это - выбрать порядок всех вершин и задать каждому симплексу ориентацию, соответствующую индуцированному порядку его вершин.
Пусть  быть ориентированным k-симплексом, рассматриваемым как базовый элемент . граничный оператор
быть ориентированным k-симплексом, рассматриваемым как базовый элемент . граничный оператор

- это линейный оператор, определяемый следующим образом:

где ориентированный симплекс

- это  th грань , полученный путем удаления его -ой вершины.
th грань , полученный путем удаления его -ой вершины.
В , элементы подгруппы

называются циклами, а подгруппа

состоит из границ .
Прямое вычисление показывает, что  . Говоря геометрическими терминами, это означает, что граница чего-либо не имеет границ. Эквивалентным образом векторные пространства
. Говоря геометрическими терминами, это означает, что граница чего-либо не имеет границ. Эквивалентным образом векторные пространства  образуют цепной комплекс. Другой эквивалентный оператор:
образуют цепной комплекс. Другой эквивалентный оператор:  содержится в
содержится в  .
.
A кубический комплекс - это набор, состоящий из точек, отрезков, квадратов, кубов и их n-мерные аналоги. Они используются аналогично симплексам для образования комплексов. элементарный интервал - это подмножество  формы
формы
![{\ displaystyle I = [\ ell, \ ell +1] \ quad {\ text {или}} \ quad I = [\ ell, \ ell]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/21ac9526c53b25181b1d5006fdfb7742457c84b6)
для некоторых  . элементарный куб
. элементарный куб  - конечное произведение элементарных интервалов, то есть
- конечное произведение элементарных интервалов, то есть

где  - элементарные интервалы. Аналогично, элементарный куб - это любой перевод единичного куба
- элементарные интервалы. Аналогично, элементарный куб - это любой перевод единичного куба ![{\ displaystyle [0,1] ^ {n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/40160923273b7109968df994dca832b91d957bf2) встроенный в евклидово пространство
встроенный в евклидово пространство  (для некоторых
(для некоторых  с
с  ). Набор
). Набор  является кубическимкомплексом, если он может быть записано как объединение элементарных кубов (или, возможно, гомеоморфно такому набору), и оно содержит все грани всех своих кубов. Граничный оператор и цепной комплекс определяются аналогично симплициальным комплексам.
является кубическимкомплексом, если он может быть записано как объединение элементарных кубов (или, возможно, гомеоморфно такому набору), и оно содержит все грани всех своих кубов. Граничный оператор и цепной комплекс определяются аналогично симплициальным комплексам.
Более общими являются клеточные комплексы.
A цепной комплекс  - это последовательность векторных пространств
- это последовательность векторных пространств  , соединенные линейными операторами (называемыми граничными операторами )
, соединенные линейными операторами (называемыми граничными операторами )  , так что композиция любых двух последовательных карт является нулевая карта. Явно граничные операторы удовлетворяют
, так что композиция любых двух последовательных карт является нулевая карта. Явно граничные операторы удовлетворяют  или с индексами подавлено, . Комплекс можно записать следующим образом.
или с индексами подавлено, . Комплекс можно записать следующим образом.

A simplicial map is a map between simplicial complexes with the property that the images of the vertices of a simplex always span a simplex (therefore, vertices have vertices for images). A simplicial map from a simplicial complex to another  is a function from the vertex set of to the vertex set of such that the image of each simplex in (viewed as a set of vertices) is a simplex in . It generates a linear map, called a chain map, from the chain complex of to the chain complex of . Explicitly, it is given on
is a function from the vertex set of to the vertex set of such that the image of each simplex in (viewed as a set of vertices) is a simplex in . It generates a linear map, called a chain map, from the chain complex of to the chain complex of . Explicitly, it is given on  -chains by
-chains by

if  are all distinct, and otherwise it is set equal to .
are all distinct, and otherwise it is set equal to .
A chain mapbetween two chain complexes  and
and  is a sequence
is a sequence  of homomorphisms
of homomorphisms  for each that commutes with the boundary operators on the two chain complexes, so
for each that commutes with the boundary operators on the two chain complexes, so  . This is written out in the following commutative diagram :
. This is written out in the following commutative diagram :

A chain map sends cycles to cycles and boundaries to boundaries.
See references.
Discrete differential forms: cochains
For each vector space Ciin the chain complex we consider its dual space  and
and  is its dual linear operator
is its dual linear operator

Это дает эффект "переворота всех стрелок" исходного комплекса, оставляя комплекс коцепей

Комплекс коцепей  - это двойственное понятие цепного комплекса. Он состоит из последовательности векторных пространств
- это двойственное понятие цепного комплекса. Он состоит из последовательности векторных пространств  соединены линейными операторами
соединены линейными операторами  удовлетворяет
удовлетворяет  . Комплекс коцепи может быть записан аналогично цепному комплексу.
. Комплекс коцепи может быть записан аналогично цепному комплексу.

Индекс в  или
или  обозначается как градус (или размер ). Разница между цепными и коцепными комплексами состоит в том, что в цепных комплексах дифференциалы увеличивают размерность, тогда как в коцепных комплексах они увеличивают размерность.
обозначается как градус (или размер ). Разница между цепными и коцепными комплексами состоит в том, что в цепных комплексах дифференциалы увеличивают размерность, тогда как в коцепных комплексах они увеличивают размерность.
Элементы отдельных векторных пространств (со) комплекса называются коцепями . Элементы в ядре из  называются коциклами (или закрытыми элементами), а элементы в изображении из называются кограницами (или точными элементами). Прямо из определения дифференциала все границы являются циклами.
называются коциклами (или закрытыми элементами), а элементы в изображении из называются кограницами (или точными элементами). Прямо из определения дифференциала все границы являются циклами.
лемма Пуанкаре утверждает, что если  является открытым шаром в
является открытым шаром в  , любая закрытая
, любая закрытая  -form
-form  , специальный в , является точным, для любого целого с
, специальный в , является точным, для любого целого с  .
.
Когда мы называем коцепи дискретными (дифференциальными) формами, мы упоминаемся на как внешнее производное . Мы также используем обозначения исчисления для значений форм:

Теорема Стокса - это утверждение о дискретных дифференциальных формах на разнообразиях, которое обобщает основную теорема дискретного исчисления для разбиения интервала:

Теорема Стокса гласит, что сумма формы по граница некоторого ориентируемое размерие  равно сумме его внешней производной
равно сумме его внешней производной  по всему , то есть есть
по всему , то есть есть

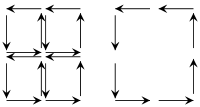
Стоит изучить основной принцип, рассмотрев пример для  размеров. Суть идеи может быть понята из диаграммы слева, которая показывает, что в ориентированном замощении множества внутренних путей пересекаются в противоположных направлениях; их вклады в интеграл по путям, таким образом, попарно компенсируют друг друга. Как следствие, остается только вклад от границы.
размеров. Суть идеи может быть понята из диаграммы слева, которая показывает, что в ориентированном замощении множества внутренних путей пересекаются в противоположных направлениях; их вклады в интеграл по путям, таким образом, попарно компенсируют друг друга. Как следствие, остается только вклад от границы.
См. Ссылки.
Произведение форм
В дискретном исчислении это конструкция, которая создает из форм более высокого порядка: следующие две формы коцепи степени и  для формирования составной коцепи степени
для формирования составной коцепи степени  .
.
Для кубических комплексов, произведение клина состоит на каждом кубе, рассматриваемом как пространство той же размерности.
Для симплициальных комплексов продукт клина реализован как чашечный продукт : if  - это -cochain и
- это -cochain и  - это -сцепка, тогда
- это -сцепка, тогда

где - это  -симплекс и
-симплекс и  , симплекс, охватываемый в -симплекс, вершины которого индексируются
, симплекс, охватываемый в -симплекс, вершины которого индексируются  . Итак,
. Итак,  является -ой лицевой стороной и
является -ой лицевой стороной и  - это - й задняя грань соответственно.
- это - й задняя грань соответственно.
кограница чашечного продукта коцепей и определяется как

Чашечное произведение двух коциклов снова является коциклом, а произведение кограницы на коцикл (в любом порядке) является кограницей.
Операция изготовления удовлетворяет тождеству

Другими словами, соответствующее умножение будет градуированно-коммутативным.
См. ссылки.
Оператор Лапласа
Оператор Лапласа  функции в вершине , является (с точностью до множителя) скоростью, с которой среднее значение в клеточной окрестности отклоняется от
функции в вершине , является (с точностью до множителя) скоростью, с которой среднее значение в клеточной окрестности отклоняется от  . Оператор Лапласа представляет плотность потока градиентного потока функции. Например, используется чистая скорость, с которой химическое вещество, растворенное в жидкости, движется к некоторой точке от нее, пропорциональна оператору Лапласа с помощью в этой точке; выраженное символически, результирующее уравнение представляет собой уравнение диффузии . По этим причинам он широко используется в науке для моделирования различных физических явлений.
. Оператор Лапласа представляет плотность потока градиентного потока функции. Например, используется чистая скорость, с которой химическое вещество, растворенное в жидкости, движется к некоторой точке от нее, пропорциональна оператору Лапласа с помощью в этой точке; выраженное символически, результирующее уравнение представляет собой уравнение диффузии . По этим причинам он широко используется в науке для моделирования различных физических явлений.
кодифференциальный

- это оператор определено на -forms как:

, где - внешняя производная или дифференциал, а  - звездный оператор Ходжа.
- звездный оператор Ходжа.
Кодифференциал - это , присоединенный к внешней производной согласно теореме Стокса:

Дифференциал удовлетворяет  , кодифференциал имеет соответствующее свойство
, кодифференциал имеет соответствующее свойство

Оператор Лапласа определяется следующим образом:

См. ссылки.
Связанные
См. Также

 Наклон:
Наклон:  Постоянная скорость
Постоянная скорость  Сумма Римана измеряет общую площадь полос, определяемую параметром
Сумма Римана измеряет общую площадь полос, определяемую параметром  Симплициальный комплекс.
Симплициальный комплекс.  Граница берется граница 2-симплекса (слева) и граница 1-цепи (справа). Оба равны 0, являясь суммой, в которой как положительное, так и отрицательное значение 0-симплекса встречаются один раз. Граница границы всегда равна 0. Нетривиальный цикл - это то, что замыкается, как граница симплекса, в том смысле, что его граница равна 0, но на самом деле это не граница симплекса или цепи.
Граница берется граница 2-симплекса (слева) и граница 1-цепи (справа). Оба равны 0, являясь суммой, в которой как положительное, так и отрицательное значение 0-симплекса встречаются один раз. Граница границы всегда равна 0. Нетривиальный цикл - это то, что замыкается, как граница симплекса, в том смысле, что его граница равна 0, но на самом деле это не граница симплекса или цепи. 
