
Войти
 Возникает аттрактор Лоренца в исследовании осциллятора Лоренца, динамической системы.
Возникает аттрактор Лоренца в исследовании осциллятора Лоренца, динамической системы. В математике, динамическая система - это система, в которой функция описывает зависимость времени точки точки в геометрическом пространстве. Примеры включают математические модели, которые описывают колебания часов маятник, поток воды в трубе и количество рыб каждую весну. в озере.
В любой момент времени динамическая система имеет состояние , заданное кортежем из вещественных чисел (вектор ), который может быть представлен точкой в соответствующем пространстве состояний (геометрическое многообразие ). Правило эволюции динамической системы - это функция, которая описывает, какие будущие состояния следуют из текущего состояния. Часто функция является детерминированной, то есть для заданного временного интервала только одно будущее состояние следует из текущего состояния. Однако некоторые системы являются стохастическими, поскольку случайные события также влияют на эволюцию переменных состояния.
В физике динамическая система описывается как «частица или ансамбль частиц, состояние которых изменяется во времени и, таким образом, подчиняется дифференциальным уравнениям, включающим производные по времени». Чтобы сделать прогноз относительно будущего поведения системы, реализуется аналитическое решение таких уравнений или их интегрирование с течением времени посредством компьютерного моделирования.
Изучение динамических систем находится в центре внимания теории динамических систем, которая имеет приложения к широкому кругу областей, таких как математика, физика, биология, химия, инженерия, экономика, история и медицина. Динамические системы являются фундаментальной частью теории хаоса, логистической карты динамики, теории бифуркаций, самосборки и самосборки. -организация процессов и концепция грани хаоса.
Концепция динамического Система берет свое начало в механике Ньютона. Здесь, как и в других естественных и инженерных дисциплинах, правило эволюции динамических систем является неявным отношением, которое дает состояние системы только на короткое время в будущем. (Отношение представляет собой либо дифференциальное уравнение, разностное уравнение, или другую шкалу времени.) Чтобы определить состояние для всех будущих времен, необходимо многократно повторять соотношение - каждый шаг вперед маленький шаг. Итерационная процедура называется решением системы или интегрированием системы. Если система может быть решена, то с учетом начальной точки можно определить все ее будущие положения, набор точек, известный как траектория или орбита.
До появления компьютеры, для поиска орбиты требовались сложные математические методы и могли быть выполнены только для небольшого класса динамических систем. Численные методы, реализованные на электронных вычислительных машинах, упростили задачу определения орбит динамической системы.
Для простых динамических систем знания траектории часто бывает достаточно, но большинство динамических систем слишком сложны, чтобы понимать их в терминах отдельных траекторий. Трудности возникают, потому что:
Многие люди считают французского математика Анри Пуанкаре как основоположник динамических систем. Пуанкаре опубликовал две, ставшие теперь классическими, монографии: «Новые методы небесной механики» (1892–1899) и «Лекции по небесной механике» (1905–1910). В них он успешно применил результаты своих исследований к проблеме движения трех тел и подробно изучил поведение решений (частота, устойчивость, асимптотика и т. Д.). Эти статьи включали теорему Пуанкаре о возвращении, которая гласит, что определенные системы через достаточно долгое, но конечное время вернутся в состояние, очень близкое к начальному состоянию.
Александр Ляпунов разработал многие важные методы аппроксимации. Его методы, разработанные им в 1899 г., позволяют определять устойчивость систем обыкновенных дифференциальных уравнений. Он создал современную теорию устойчивости динамической системы.
В 1913 году Джордж Дэвид Биркгоф доказал «Последнюю геометрическую теорему » Пуанкаре, частный случай задачи трех тел. это сделало его всемирно известным. В 1927 году он опубликовал свою книгу Динамические системы. Самым надежным результатом Биркгофа стало его открытие в 1931 году того, что сейчас называется эргодической теоремой. Объединив выводы из физики о эргодической гипотезе с теорией меры, эта теорема решила, по крайней мере в принципе, фундаментальную проблему статистической механики. Эргодическая теорема также повлияла на динамику.
Стивен Смейл также добился значительных успехов. Его первым вкладом была подкова Смейла, положившая начало значительным исследованиям динамических систем. Он также изложил исследовательскую программу, проводимую многими другими.
Александр Николаевич Шарковский разработал теорему Шарковского о периодах дискретных динамических систем в 1964 году. Одно из следствий теоремы состоит в том, что если дискретная динамическая система на вещественная линия имеет периодическую точку периода 3, тогда она должна иметь периодические точки любого другого периода.
В конце 20 века палестинский инженер-механик Али Х. Найфе применил нелинейную динамику в механике и машиностроении системы. Его новаторская работа в прикладной нелинейной динамике повлияла на создание и обслуживание машин и конструкций, которые распространены в повседневной жизни, таких как корабли, краны, мосты, здания, небоскребы, реактивные двигатели, ракетные двигатели, самолет и космический корабль.
Динамическая система - это многообразие M, называемое фазовым пространством (или состоянием), наделенное семейством функций плавной эволюции Φ, что для любого элемента t ∈ T, времени, точка фазового пространства отображается обратно в фазовое пространство. Понятие гладкости меняется в зависимости от приложений и типа многообразия. Есть несколько вариантов для набора T. Когда T принимается за действительные числа, динамическая система называется потоком ; и если T ограничено неотрицательными действительными числами, то динамическая система является полупотоком. Когда T принимается за целые числа, это каскад или карта; и ограничение на неотрицательные целые числа является полукскадным.
Примечание: существует еще одно техническое условие, что Φ является действием T на M. Это включает в себя факты, что Φ является тождественной функцией и что Φ является композицией Φ и Φ. Это действие полугруппы , которое не требует наличия отрицательных значений для t и не требует, чтобы функции Φ были обратимыми.
Функция эволюции Φ часто является решением дифференциального уравнения движения

Уравнение дает производную по времени, представленную точкой, траектории x (t) в фазовом пространстве, начиная с некоторой точки x 0. Векторное поле v (x) представляет собой гладкую функцию, которая в каждой точке фазового пространства M обеспечивает вектор скорости динамической системы в этой точке. (Эти векторы являются векторами не в фазовом пространстве M, а в касательном пространстве TxM точки x.) Для гладкого Φ из него может быть получено автономное векторное поле.
Нет необходимости ни в производных высшего порядка в уравнении, ни во временной зависимости v (x), потому что их можно устранить, рассматривая системы более высоких измерений. Другие типы дифференциальных уравнений могут использоваться для определения правила эволюции:

- это пример уравнения, возникающего при моделировании механических систем со сложными ограничениями.
Дифференциальные уравнения, определяющие функцию эволюции Φ, часто являются обыкновенными дифференциальными уравнениями ; в этом случае фазовое пространство M - конечномерное многообразие. Многие концепции динамических систем могут быть распространены на бесконечномерные многообразия - те, которые являются локально банаховыми пространствами, - в этом случае дифференциальные уравнения являются уравнениями в частных производных. В конце 20 века динамическая системная перспектива уравнений в частных производных начала набирать популярность.
.
Линейные динамические системы могут быть решены в терминах классифицированы простые функции и поведение всех орбит. В линейной системе фазовое пространство - это N-мерное евклидово пространство, поэтому любая точка в фазовом пространстве может быть представлена вектором с N числами. Анализ линейных систем возможен, потому что они удовлетворяют принципу суперпозиции : если u (t) и w (t) удовлетворяют дифференциальному уравнению для векторного поля (но не обязательно начальному условию), то то же самое будет u (t) + w (t).
Для потока векторное поле v (x) является аффинной функцией положения в фазовом пространстве, то есть,

с матрицей A, ba вектор чисел и x вектор положения. Решение этой системы можно найти, используя принцип суперпозиции (линейность). Случай b ≠ 0 с A = 0 - это просто прямая линия в направлении b:

Когда b равно нулю и A ≠ 0, начало координат является точкой равновесия (или особой) точки потока, что есть, если x 0 = 0, то орбита остается там. Для других начальных условий уравнение движения задается экспонентой матрицы : для начальной точки x 0,

Когда b = 0, собственные значения A определяют структуру фазовое пространство. Из собственных значений и собственных векторов оператора A можно определить, будет ли начальная точка сходиться или расходиться к точке равновесия в начале координат.
Расстояние между двумя различными начальными условиями в случае A ≠ 0 в большинстве случаев будет изменяться экспоненциально, либо экспоненциально быстро приближаясь к точке, либо экспоненциально быстро расходясь. Линейные системы демонстрируют чувствительную зависимость от начальных условий в случае расхождения. Для нелинейных систем это одно из (необходимых, но не достаточных) условий для хаотического поведения.
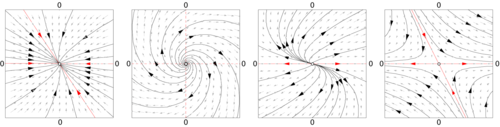 линейных векторных полей и нескольких траекторий.
линейных векторных полей и нескольких траекторий. A с дискретным временем, аффинными динамическая система имеет форму матричного разностного уравнения :

с Матрица и вектор ba. Как и в непрерывном случае, изменение координат x → x + (1 - A) b удаляет член b из уравнения. В новой системе координат начало координат является фиксированной точкой карты, а решения относятся к линейной системе Ax 0. Решения для карты больше не кривые, а точки, прыгающие в фазовом пространстве. Орбиты организованы в виде кривых или волокон, которые представляют собой наборы точек, которые отображаются сами в себя под действием карты.
Как и в непрерывном случае, собственные значения и собственные векторы A определяют структуру фазового пространства. Например, если u 1 является собственным вектором A с действительным собственным значением меньше единицы, то прямые, заданные точками вдоль α u 1, с α ∈ R - инвариантная кривая карты. Точки на этой прямой переходят в фиксированную точку.
Существует также много других дискретных динамических систем.
Качественные свойства динамических систем не меняются при плавном изменении координат (иногда это принимают за определение качественного): особая точка векторного поля (точка, в которой v (x) = 0) останется особой точкой при плавных преобразованиях; Периодическая орбита - это петля в фазовом пространстве, и плавные деформации фазового пространства не могут изменить ее, будучи петлей. Именно в окрестностях особых точек и периодических орбит можно хорошо понять структуру фазового пространства динамической системы. При качественном исследовании динамических систем подход состоит в том, чтобы показать, что есть изменение координат (обычно неуказанное, но вычислимое), которое делает динамическую систему настолько простой, насколько это возможно.
Поток в большинстве небольших участков фазового пространства можно сделать очень простым. Если y - точка, в которой векторное поле v (y) ≠ 0, то происходит изменение координат для области вокруг y, где векторное поле становится серией параллельных векторов одинаковой величины. Это известно как теорема исправления.
Теорема исправления гласит, что вдали от особых точек динамика точки на небольшом участке представляет собой прямую линию. Патч иногда можно увеличить, сшив вместе несколько патчей, и когда это работает во всем фазовом пространстве M, динамическая система является интегрируемой. В большинстве случаев патч нельзя распространить на все фазовое пространство. В векторном поле могут быть особые точки (где v (x) = 0); или пятна могут становиться все меньше и меньше по мере приближения к какой-то точке. Более тонкая причина - это глобальное ограничение, когда траектория начинается в патче, а после посещения ряда других патчей возвращается к исходной. Если в следующий раз орбита будет обходить фазовое пространство по-другому, то исправить векторное поле во всей серии пятен будет невозможно.
В общем, в окрестности периодической орбиты теорема исправления не может быть использована. Пуанкаре разработал подход, который преобразует анализ около периодической орбиты в анализ карты. Выберите точку x 0 на орбите γ и рассмотрите точки в фазовом пространстве в этой окрестности, которые перпендикулярны v (x 0). Эти точки являются сечением Пуанкаре S (γ, x 0) орбиты. Теперь поток определяет карту, карту Пуанкаре F: S → S, для точек, начинающихся в S и возвращающихся в S. Не для всех этих точек потребуется одинаковое количество времени, чтобы вернуться, но времена будет близко к времени, которое потребуется x 0.
Пересечение периодической орбиты с сечением Пуанкаре является фиксированной точкой отображения Пуанкаре F. Путем перевода можно предположить, что точка находится в точке x = 0. Тейлор серия карты F (x) = J · x + O (x), поэтому можно ожидать, что изменение координат h упростит F до его линейной части

Это известно как уравнение сопряжения. Поиск условий для выполнения этого уравнения был одной из основных задач исследования динамических систем. Пуанкаре первым подошел к нему, предполагая, что все функции аналитические, и в процессе обнаружил условие нерезонансности. Если λ 1,..., λ ν являются собственными значениями J, они будут резонансными, если одно собственное значение является целочисленной линейной комбинацией двух или более других. Поскольку члены формы λ i - ∑ (кратные другим собственным значениям) встречаются в знаменателе членов функции h, условие нерезонансности также известно как проблема малых делителей.
Результаты существования решения уравнения сопряжения зависят от собственных значений J и степени гладкости, требуемой от h. Поскольку J не нуждается в каких-либо специальных симметриях, его собственные значения обычно будут комплексными числами. Когда собственные значения J не находятся в единичной окружности, динамика вблизи фиксированной точки x 0 F называется гиперболической, а когда собственные значения находятся на единичной окружности и являются комплексными, динамика называется эллиптической.
В гиперболическом случае теорема Хартмана – Гробмана дает условия существования непрерывной функции, отображающей окрестность неподвижной точки отображения в линейное отображение J · x. Гиперболический случай также структурно устойчив. Небольшие изменения в векторном поле будут производить только небольшие изменения в отображении Пуанкаре, и эти небольшие изменения будут отражаться в небольших изменениях положения собственных значений J в комплексной плоскости, подразумевая, что карта все еще является гиперболической.
Теорема Колмогорова – Арнольда – Мозера (КАМ) дает поведение вблизи эллиптической точки.
Когда карта эволюции Φ (или векторное поле, из которого она получена) зависит от параметра μ, структура фазового пространства также будет зависеть по этому параметру. Небольшие изменения могут не вызывать качественных изменений в фазовом пространстве, пока не будет достигнуто особое значение μ 0. В этот момент фазовое пространство качественно меняется, и говорят, что динамическая система пережила бифуркацию.
Теория бифуркации рассматривает структуру в фазовом пространстве (обычно фиксированную точку, периодическую орбиту или инвариантный тор ) и изучает ее поведение как функцию параметр μ. В точке бифуркации структура может изменить свою устойчивость, разделиться на новые структуры или слиться с другими структурами. Используя аппроксимацию карт рядами Тейлора и понимание различий, которые могут быть устранены путем изменения координат, можно каталогизировать бифуркации динамических систем.
Бифуркации гиперболической фиксированной точки x 0 семейства систем F μ могут быть охарактеризованы собственными значениями первой производной система DF μ(x0), вычисленная в точке бифуркации. Для карты бифуркация произойдет, когда на единичной окружности есть собственные значения DF μ. Для потока это произойдет, когда на мнимой оси есть собственные значения. Для получения дополнительной информации см. Основную статью по теории бифуркаций.
Некоторые бифуркации могут привести к очень сложным структурам в фазовом пространстве. Например, описывает, как периодическая орбита раздваивается на тор, а тор на странный аттрактор. В другом примере удвоение периода Фейгенбаума описывает, как стабильная периодическая орбита проходит через серию бифуркаций удвоения периода.
Во многих динамических системах это Можно выбрать координаты системы так, чтобы объем (на самом деле ν-мерный объем) в фазовом пространстве был инвариантным. Это происходит с механическими системами, выведенными из законов Ньютона, если координатами являются положение и импульс, а объем измеряется в единицах (положение) × (импульс). Поток переводит точки подмножества A в точки Φ (A), и инвариантность фазового пространства означает, что

В гамильтоновом формализме для заданной координаты возможно для получения соответствующего (обобщенного) импульса, при котором связанный объем сохраняется потоком. Говорят, что объем вычисляется с помощью меры Лиувилля.
. В гамильтоновой системе не все возможные конфигурации положения и импульса могут быть достигнуты из начального условия. Из-за сохранения энергии доступны только состояния с той же энергией, что и начальное условие. Состояния с одинаковой энергией образуют энергетическую оболочку Ω, подмногообразие фазового пространства. Объем энергетической оболочки, вычисленный с использованием меры Лиувилля, сохраняется при эволюции.
Для систем, в которых объем сохраняется потоком, Пуанкаре открыл теорему о возвращении : предположим, что фазовое пространство имеет конечный лиувиллевский объем, и пусть F будет отображением фазового пространства, сохраняющим объем, и Подмножество фазового пространства. Тогда почти каждая точка A возвращается в A бесконечно часто. Цермело использовал теорему Пуанкаре о возвращении, чтобы возразить против вывода Больцмана об увеличении энтропии в динамической системе сталкивающихся атомов.
Одним из вопросов, поднятых работой Больцмана, было возможное равенство между средними по времени и средними по пространству, что он назвал эргодической гипотезой. Гипотеза утверждает, что время, в течение которого типичная траектория проходит в области A, составляет объем (A) / объем (Ω).
Эргодическая гипотеза оказалась несущественным свойством, необходимым для развития статистической механики, и ряд других эргодических свойств был введен для отражения соответствующих аспектов физических систем. Купман подошел к изучению эргодических систем с помощью функционального анализа. Наблюдаемая a - это функция, которая с каждой точкой фазового пространства связывает число (например, мгновенное давление или среднюю высоту). Значение наблюдаемой можно вычислить в другое время, используя функцию эволюции φ. Это вводит оператор U, оператор передачи ,

Изучая спектральные свойства линейного оператора U, становится возможным классифицировать эргодический свойства Φ. При использовании подхода Купмана, рассматривающего действие потока на наблюдаемую функцию, конечномерная нелинейная задача, включающая Φ, преобразуется в бесконечномерную линейную задачу, включающую U.
Мера Лиувилля, ограниченная энергией поверхность Ω является основой для средних значений, вычисленных в статистической механике равновесия. Среднее по времени вдоль траектории эквивалентно среднему по пространству, вычисленному с помощью фактора Больцмана exp (−βH). Эта идея была обобщена Синаем, Боуэном и Рюэлем (SRB) на более широкий класс динамических систем, который включает диссипативные системы. заменяют фактор Больцмана, и они определяются на аттракторах хаотических систем.
Простые нелинейные динамические системы и даже кусочно-линейные системы могут демонстрировать совершенно непредсказуемое поведение, которое может показаться случайным, несмотря на то, что они по своей сути детерминированы. Это, казалось бы, непредсказуемое поведение получило название хаос. Гиперболические системы - это точно определенные динамические системы, которые проявляют свойства, приписываемые хаотическим системам. В гиперболических системах касательное пространство, перпендикулярное траектории, может быть хорошо разделено на две части: одну с точками, сходящимися к орбите (устойчивое многообразие), и другую с точками, расходящимися с орбиты (неустойчивое многообразие).
Этот раздел математики имеет дело с долгосрочным качественным поведением динамических систем. Здесь основное внимание уделяется не поиску точных решений уравнений, определяющих динамическую систему (что часто безнадежно), а, скорее, ответам на такие вопросы, как «успокоится ли система до устойчивого состояния в долгосрочной перспективе, и если да, то каковы возможные аттракторы ? " или «Зависит ли долгосрочное поведение системы от ее начального состояния?»
Обратите внимание, что проблема не в хаотическом поведении сложных систем. Метеорология уже много лет известна своим сложным - даже хаотичным - поведением. Теория хаоса была настолько удивительной, потому что хаос можно найти в почти тривиальных системах. Логистическая карта - это полином только второй степени; отображение подковы кусочно линейно.
Динамическая система - это кортеж 



динамическая система может быть определенным формально, как сохраняющее меру преобразование сигма-алгебры, квадруплета (X, Σ, μ, τ). Здесь X - это множество, а Σ - это сигма-алгебра на X, так что пара (X, Σ) является измеримым пространством. μ - это конечная мера на сигма-алгебре, так что тройка (X, Σ, μ) является вероятностным пространством. Отображение τ: X → X называется Σ-измеримой тогда и только тогда, когда для каждого σ ∈ Σ выполняется 

Карта τ воплощает эволюцию динамической системы во времени. Таким образом, для дискретных динамических систем повторяет 
Динамические системы определяются по одной независимой переменной, обычно называемой временем. Более общий класс систем определяется над несколькими независимыми переменными и поэтому называется многомерными системами. Такие системы полезны для моделирования, например, обработки изображений.
| На Викискладе есть материалы, связанные с Динамическими системами. |