
Войти
В векторном исчислении, curl является векторным оператором , который описывает бесконечно малое вращение векторного поля в трех -мерное евклидово пространство. В каждой точке поля изгиб этой точки представлен вектором . Атрибуты этого вектора (длина и направление) характеризуют поворот в этой точке.
Направление изгиба - это ось вращения, как определено правилом правой руки, а величина изгиба - это величина вращения. Если векторное поле представляет собой скорость потока движущейся текучей среды, то завихрение представляет собой циркуляционную плотность текучей среды. Векторное поле, ротор которого равен нулю, называется безвихревым. Curl - это форма дифференцирования для векторных полей. Соответствующая форма основной теоремы исчисления - это теорема Стокса, которая связывает поверхностный интеграл ротора векторного поля с линией . интеграл векторного поля вокруг граничной кривой.
Альтернативная терминология вращение или вращение и альтернативные обозначения rot F и ∇ × F часто используются (первое, особенно во многих европейских странах, второе, с использованием оператор del (или набла) и перекрестное произведение , больше используется в других странах) для curl F.
В отличие от градиента и дивергенции, curl не обобщается просто на другие измерения; некоторые обобщения возможны, но только в трех измерениях геометрически определенный ротор векторного поля снова является векторным полем. Это явление аналогично трехмерному перекрестному произведению , и связь отражена в обозначении ∇ × для локона.
Название «завиток» было впервые предложено Джеймсом Клерком Максвеллом в 1871 году, но, по-видимому, впервые эта концепция была использована при построении теории оптического поля Джеймсом МакКуллагом в 1839 г.
 Компоненты F в позиции r, нормальные и касательные к замкнутой кривой C на плоскости, охватывающей плоскую векторную область
Компоненты F в позиции r, нормальные и касательные к замкнутой кривой C на плоскости, охватывающей плоскую векторную область  .
.Ротор векторного поля F, обозначаемый curl F, или ∇ × F, или rot F, в точке определяется в терминах ее проекции на различные прямые, проходящие через точку. Если 
Оператор rot переводит непрерывно дифференцируемые функции f: ℝ → в непрерывные функции g: ℝ →, и, в частности, он отображает C функций в ℝ в C-функции в.
 Соглашение о векторной ориентации линейного интеграла
Соглашение о векторной ориентации линейного интеграла Неявно определяется curl:

где ∮ CF⋅ d r - линейный интеграл вдоль границы рассматриваемой области области, и | A | - величина площади. Это уравнение определяет проекцию изгиба F на
 Правило правой руки для ориентации кривой. Большой палец указывает в направлении , а пальцы сгибаются в направлении C.
Правило правой руки для ориентации кривой. Большой палец указывает в направлении , а пальцы сгибаются в направлении C. Формула выше означает, что ротор векторного поля определяется как бесконечно малая плотность площади циркуляции этого поля. Этому определению, естественно,
![{\ displaystyle {\ begin {align} (\ operatorname {curl} \ mathbf {F}) _ {1} = {\ frac {1} {h_ {2} h_ {3}}} \ left ({\ frac {\ partial (h_ {3} F_ {3})} {\ partial u_ {2}}} - {\ frac {\ partial (h_ {2} F_ {2})} {\ partial u_ {3}}} \ right), \\ [5pt] (\ operatorname {curl} \ mathbf {F}) _ {2} = {\ frac {1} {h_ {3} h_ {1}}} \ left ({\ frac {\ partial (h_ {1} F_ {1})} {\ partial u_ {3}}} - {\ frac {\ partial (h_ {3} F_ {3})} {\ partial u_ {1}}} \ right), \\ [5pt] (\ operator имя {curl} \ mathbf {F}) _ {3} = {\ frac {1} {h_ {1} h_ {2}}} \ left ({\ frac {\ partial (h_ {2} F_ {2}))} {\ partial u_ {1}}} - {\ frac {\ partial (h_ {1} F_ {1})} {\ partial u_ {2}}} \ right). \ end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/72c5af513489cd914b40cf463007656bc9a9cd3c)
Уравнение для каждого компонента (curl F)kможет быть получено заменой каждого вхождения нижнего индекса 1, 2, 3 в циклической перестановке: 1 → 2, 2 → 3, и 3 → 1 (где нижние индексы представляют соответствующие индексы).
If (x 1, x 2, x 3) - декартовы координаты и (u 1, u 2, u 3) - ортогональные координаты, тогда

- длина вектора координат, соответствующего u i. Остальные два компонента curl являются результатом циклической перестановки индексов : 3,1,2 → 1,2,3 → 2,3,1.
Предположим, векторное поле описывает поле скорости потока жидкости (например, большой резервуар с жидкостью или газ ), а небольшой шарик находится внутри жидкости или газа (центр шарика закреплен в определенной точке). Если шар имеет шероховатую поверхность, жидкость, протекающая мимо него, заставит его вращаться. Ось вращения (ориентированная согласно правилу правой руки) указывает в направлении завитка поля в центре мяча, а угловая скорость вращения составляет половину величины завитка в этой точке.
Ротор вектора в любой точке задается вращением бесконечно малой области в плоскости xy (для компонента локона по оси z), плоскости zx (для компонента по оси y в изгибе) и yz-plane (для компонента оси x вектора локона). Это хорошо видно на примерах ниже.
На практике приведенное выше определение используется редко, потому что практически во всех случаях оператор curl может применяться с использованием некоторого набора криволинейных координат, для которого получены более простые представления.
Обозначение ∇ × F происходит от сходства с трехмерным перекрестным произведением, и его можно использовать как мнемонику в декартовых координатах, если ∇ взят как вектор дифференциальный оператор del. Такая запись, включающая операторы, обычна в физике и алгебре.
Расширенный в 3-мерных декартовых координатах (см. Del в цилиндрических и сферические координаты для сферических и цилиндрических координатных представлений), ∇ × F для F состоит из [F x, F y, F z ]:
![{\ displaystyle \ nabla \ times \ mathbf {F} = {\ begin {vmatrix} {\ boldsymbol {\ hat {\ imath}}} {\ boldsymbol {\ hat {\ jmath}}} {\ жирный символ {\ hat {k}}} \\ [5pt] {\ dfrac {\ partial} {\ partial x}} {\ dfrac {\ partial} {\ partial y}} {\ dfrac {\ partial} { \ partial z}} \\ [10pt] F_ {x} F_ {y} F_ {z} \ end {vmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7cb295cbe1c98d362263a79bc541e3091f7e6405)
где i, jи k - это единичные векторы для осей x, y и z соответственно. Это расширяется следующим образом:

Хотя выражается в координатах, результат инвариантен при правильном повороте осей координат, но результат инвертируется при отражении ион.
В общей системе координат изгиб задается формулой

где ε обозначает тензор Леви-Чивиты, а ∇ ковариантная производная, метрический тензор используется для понижения индекса на F, а соглашение о суммировании Эйнштейна подразумевает, что повторяющиеся индексы подытожил. В декартовой системе координат ковариантная производная сводится к частной производной. Эквивалентно,

где ek- координатные векторные поля. Эквивалентно, используя внешнюю производную, локон можно выразить как:

Здесь ♭ и ♯ - музыкальные изоморфизмы, а ★ - это звездный оператор Ходжа. Эта формула показывает, как вычислить ротор F в любой системе координат и как расширить ротор до любого ориентированного трехмерного риманова многообразия. Поскольку это зависит от выбора ориентации, curl - это операция киральной. Другими словами, если ориентация меняется на противоположную, то направление завивки также меняется на противоположное.
Возьмем векторное поле :

Для ясности, это можно разложить следующим образом:

Соответствующий график:

При визуальном осмотре поле можно описать как «вращающееся». Если бы векторы поля представляли линейную силу, действующую на объекты, присутствующие в этой точке, и объект должен был быть помещен внутри поля, объект начал бы вращаться по часовой стрелке вокруг себя. Это верно независимо от того, где размещен объект.
Вычисление локона:

Результирующее векторное поле, описывающее завиток, будет равномерно двигаться в отрицательном направлении z. Результаты этого уравнения совпадают с тем, что можно было бы предсказать, используя правило правой руки с использованием правой системы координат. Будучи однородным векторным полем, описанный выше объект будет иметь одинаковую интенсивность вращения независимо от того, где он находится.
График, описывающий завиток F:

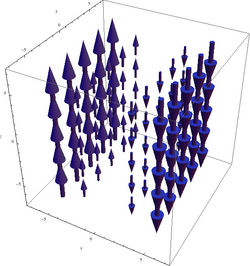
Возьмем векторное поле:

Соответствующий график:

При первоначальной проверке curl, существующий в этом графе, не будет очевиден. Однако если взять объект в предыдущем примере и поместить его в любое место на линии x = 3, сила, приложенная к правой стороне, будет немного больше, чем сила, приложенная к левой, заставляя его вращаться по часовой стрелке. Используя правило правой руки, можно предсказать, что результирующий изгиб будет прямым в отрицательном направлении z. И наоборот, если поместить на x = −3, объект будет вращаться против часовой стрелки, и правило правой руки приведет к положительному направлению z.
Вычисление ротации:

Как и предполагалось, точки скручивания в отрицательном направлении z, когда x положительный, и наоборот. В этом поле интенсивность вращения будет больше по мере удаления объекта от плоскости x = 0.
График, описывающий завихрение F:
.
В общем криволинейные координаты (не только в декартовых координатах), ротор перекрестного произведения векторных полей v и F можно показать как

Меняя местами векторное поле v и оператор ∇, мы приходим к перекрестному произведению векторного поля на ротор векторного поля:

где ∇ F- это обозначение индекса Фейнмана, которое учитывает только изменение, обусловленное векторным полем F (т.е. в этом случае v рассматривается как постоянное в пространстве).
Другой пример - завиток завитка векторного поля. Можно показать, что в общих координатах

, и это тождество определяет векторный лапласиан из F, обозначается как ∇ F.
Ротор градиента любого скалярного поля φ всегда является полем нулевого вектора

, что следует из антисимметрии в определении ротора и симметрии вторых производных.
Если φ - скалярная функция, а F - векторное поле, то

Операции векторного исчисления для grad, curl и div проще всего выполнить. Это делается в контексте дифференциальных форм, что включает в себя ряд шагов. Короче говоря, они соответствуют производным от 0-форм, 1-форм и 2-форм соответственно. Геометрическая интерпретация curl как вращения соответствует идентификации бивекторов (2-векторов) в трех измерениях с помощью специальной ортогональной алгебры Ли 
В трех измерениях дифференциальная 0-форма - это просто функция f (x, y, z); дифференциальная 1-форма - это следующее выражение:

дифференциальная 2-форма - это формальная сумма:

, а дифференциальная 3-форма определяется одиночный член:

(Здесь a-коэффициенты являются действительными функциями; «произведения клина», например dx ∧ dy, можно интерпретировать как своего рода ориентированные элементы площади, dx ∧ dy = −dy ∧ dx и т. д.)
внешняя производная k-формы в ℝ определяется как (k + 1) -форма сверху - и в, если, например,
, то внешняя производная d приводит к
Внешняя производная 1-формы, следовательно, 2-формы, а 2-формы - 3-формы. С другой стороны, из-за взаимозаменяемости смешанных производных, например поскольку

двойное применение внешней производной приводит к 0.
Таким образом, обозначая пространство k-форм через Ω (ℝ) и внешней производной по d получается последовательность:

Здесь Ω (ℝ) - пространство сечений внешней алгебры Λ (ℝ) векторного расслоения над ℝ, размерность которого является биномом коэффициент (. k); обратите внимание, что Ω (ℝ) = 0 для k>3 или k < 0. Writing only dimensions, one obtains a row of треугольник Паскаля :
одномерные слои соответствуют скалярным полям, а 3 -мерные слои в векторные поля, как описано ниже. По модулю подходящих отождествлений три нетривиальных вхождения внешней производной соответствуют grad, curl и div.
Дифференциальные формы и дифференциал могут быть определены на любом евклидовом пространстве или на любом многообразии без какого-либо понятия римановой метрики. На римановом многообразии или, в более общем смысле, псевдоримановом многообразии k-формы можно отождествить с k-векторными полями (k-формы являются k-ковекторными поля, а псевдориманова метрика дает изоморфизм между векторами и ковекторами), а в ориентированном векторном пространстве с невырожденной формой (изоморфизм между векторами и ковекторами) существует изоморфизм между k-векторами и (n - k) -векторы; в частности, на (касательном пространстве) ориентированного псевдориманова многообразия. Таким образом, на ориентированном псевдоримановом многообразии можно менять местами k-формы, k-векторные поля, (n - k) -формы и (n - k)-векторные поля; это известно как двойственность Ходжа. Конкретно, на ℝ это задается:
Таким образом, идентифицируя 0-формы и 3-формы со скалярными полями, а 1-формы и 2-формы с векторными полями:
С другой стороны, тот факт, что d = 0 соответствует тождествам

для любого скалярного поля f и

для любого векторного поля v.
Grad и div обобщают на все ориентированные псевдоримановы многообразия с той же геометрической интерпретацией, потому что пространства 0-форм и n-форм всегда (послойно) одномерны и можно отождествить со скалярными полями, тогда как пространства 1-форм и (n - 1) -форм всегда послойно n-мерны и могут быть отождествлены с векторными полями.
Curl не обобщает таким образом до 4 или более измерений (или до 2 или менее измерений); в 4-мерном измерении размерности равны
так что ротор 1-векторного поля (послойно 4-мерный) является 2-векторным полем, которое послойно 6-мерное,
, что дает сумму шести независимых членов и не может быть отождествлено с 1-векторным полем. Также нельзя осмысленно перейти от 1-векторного поля к 2-векторному полю к 3-векторному полю (4 → 6 → 4), поскольку двойное взятие дифференциала дает ноль (d = 0). Таким образом, не существует ротационной функции из векторных полей в векторные поля в других измерениях, возникающих таким образом.
Однако можно определить ротор векторного поля как 2-векторное поле в целом, как описано ниже.
2-вектора соответствуют внешней мощности ΛV; при наличии внутреннего продукта в координатах это кососимметричные матрицы, которые геометрически рассматриваются как специальная ортогональная алгебра Ли
Ротор трехмерного векторного поля, который зависит только от двух координат (скажем, x и y), является просто вертикальным векторным полем (в направлении z), величина которого является завитком 2-мерного вектора. поле, как в примерах на этой странице.
Рассмотрение curl как 2-векторного поля (антисимметричный 2-тензор) было использовано для обобщения векторного исчисления и связанной с ним физики на более высокие измерения.
В случай, когда дивергенция векторного поля V равна нулю, тогда существуют векторные поля W такие, что curl (W ) = V.
If W - одно векторное поле с curl (W ) = V, тогда добавление любого градиентного векторного поля grad (f) к W приведет к другому векторное поле W + grad (f) такое, что curl (W + grad (f)) также = V . Резюмируя это, можно сказать, что обратный rot трехмерного векторного поля может быть получен с точностью до постоянной интегрирования и неизвестного безвихревого поля с помощью Закон Био – Савара.