
Войти
В математике и науке нелинейная система система , в которой изменение выхода не пропорционально изменению входа. Нелинейные задачи интересуют инженеров, биологов, физиков, математиков и многих других ученых, потому что большинство системы по своей природе нелинейны. Нелинейные динамические системы, описывающие изменения переменных во времени, могут казаться хаотическими, непредсказуемыми или противоречащими интуиции, в отличие от гораздо более простых линейных систем.
Обычно поведение нелинейной системы описывается математикой. с помощью нелинейной системы уравнений, которая представляет собой совокупность одновременных уравнений, в которых неизвестные (или неизвестные функции в случае дифференциальных уравнений ) выглядят как переменные полинома степени выше единицы или в аргументе функции функции, которая не является полиномом первой степени. Другими словами, в нелинейной системе уравнений решаемое уравнение (я) не может быть записано как линейная комбинация неизвестных переменных или функций которые появляются в них. Системы могут быть определены как нелинейные, независимо от того, присутствуют ли в уравнениях известные линейные функции. В частности, дифференциальное уравнение является линейным, если оно линейно по отношению к неизвестной функции и ее производным, даже если оно нелинейно по отношению к другим переменным, входящим в него.
Поскольку нелинейные динамические уравнения трудно решить, нелинейные системы обычно аппроксимируются линейными уравнениями (линеаризация ). Это хорошо работает с некоторой точностью и некоторым диапазоном входных значений, но некоторые интересные явления, такие как солитоны, хаос и сингулярности, скрыты линеаризацией. Отсюда следует, что некоторые аспекты динамического поведения нелинейной системы могут показаться нелогичными, непредсказуемыми или даже хаотическими. Хотя такое хаотическое поведение может напоминать случайное поведение, на самом деле оно не случайное. Например, некоторые аспекты погоды кажутся хаотичными, когда простые изменения в одной части системы производят сложные эффекты повсюду. Эта нелинейность - одна из причин, по которой точные долгосрочные прогнозы невозможны с использованием современных технологий.
Некоторые авторы используют термин нелинейная наука для исследования нелинейных систем. Этот термин оспаривается другими:
Использование такого термина, как нелинейная наука, все равно что относиться к основной части зоологии как к изучению не слонов.
— Станислав УламВ математике, линейная карта (или линейная функция) 


Аддитивность подразумевает однородность для любого рационального α, а для непрерывных функций - для любое действительное α. Для комплекса α однородность не следует из аддитивности. Например, антилинейная карта является аддитивной, но не однородной. Условия аддитивности и однородности часто объединяются в принципе суперпозиции

Уравнение, записанное как

, называется linear, если 
Определение 
Нелинейные алгебраические уравнения, которые также называются полиномиальными уравнениями, определяются приравниванием полиномы (степени больше единицы) до нуля. Например,

Для одного полиномиального уравнения алгоритмы поиска корня могут использоваться для поиска решений уравнения (т. е. наборов значений переменных, удовлетворяющих уравнению). Однако системы алгебраических уравнений сложнее; их изучение - одна из причин, побуждающих к изучению алгебраической геометрии, сложного раздела современной математики. Трудно даже решить, имеет ли данная алгебраическая система сложные решения (см. Nullstellensatz Гильберта ). Тем не менее, в случае систем с конечным числом комплексных решений эти системы полиномиальных уравнений теперь хорошо изучены, и существуют эффективные методы их решения.
Нелинейное рекуррентное отношение определяет последовательные элементы последовательности как нелинейную функцию предыдущих членов. Примерами нелинейных рекуррентных отношений являются логистическая карта и отношения, которые определяют различные последовательности Хофштадтера. Нелинейные дискретные модели, которые представляют широкий класс нелинейных рекуррентных отношений, включают модель NARMAX (нелинейное авторегрессионное скользящее среднее с внешними входными данными) и связанную с ней идентификацию нелинейной системы и процедуры анализа. Эти подходы можно использовать для изучения широкого класса сложных нелинейных поведений во временной, частотной и пространственно-временной областях.
A Система из дифференциальных уравнений называется нелинейной, если она не является линейной системой. Задачи, связанные с нелинейными дифференциальными уравнениями, чрезвычайно разнообразны, и методы решения или анализа зависят от конкретной задачи. Примерами нелинейных дифференциальных уравнений являются уравнения Навье – Стокса в гидродинамике и уравнения Лотки – Вольтерры в биологии.
Одна из самых больших трудностей нелинейных задач состоит в том, что обычно невозможно объединить известные решения в новые решения. В линейных задачах, например, семейство линейно независимых решений может использоваться для построения общих решений с помощью принципа суперпозиции. Хорошим примером этого является одномерный перенос тепла с граничными условиями Дирихле, решение которых может быть записано как зависящая от времени линейная комбинация синусоид различных частот; это делает решения очень гибкими. Часто можно найти несколько очень конкретных решений нелинейных уравнений, однако отсутствие принципа суперпозиции препятствует построению новых решений.
Обыкновенные дифференциальные уравнения первого порядка часто точно решаются путем разделения переменных, особенно для автономных уравнений. Например, нелинейное уравнение

имеет 

, а левая часть уравнения не является линейной функцией от u и его производных. Обратите внимание, что если бы член u был заменен на u, проблема была бы линейной (проблема экспоненциального убывания ).
Обыкновенные дифференциальные уравнения второго и более высокого порядка (в более общем смысле, системы нелинейных уравнений) редко дают решения в замкнутой форме, хотя неявные решения и решения, содержащие неэлементарные интегралы, являются столкнулся.
Общие методы качественного анализа нелинейных обыкновенных дифференциальных уравнений включают:
Наиболее распространенный базовый подход к изучению нелинейных уравнений с частными производными - это изменение переменных (или иное преобразование проблемы) так что результирующая задача будет проще (возможно, даже линейной). Иногда уравнение может быть преобразовано в одно или несколько обыкновенных дифференциальных уравнений, как показано в разделе разделение переменных, что всегда полезно независимо от того, является ли результирующее обыкновенное дифференциальное уравнение (я) разрешимо.
Другая распространенная (хотя и менее математическая) тактика, часто применяемая в механике жидкости и тепла, - это использование анализа масштаба для упрощения общего естественного уравнения в определенном конкретном граничном значении. проблема. Например, (очень) нелинейные уравнения Навье-Стокса могут быть упрощены до одного линейного уравнения в частных производных в случае переходного, ламинарного, одномерного потока в круглой трубе; масштабный анализ обеспечивает условия, при которых поток является ламинарным и одномерным, а также дает упрощенное уравнение.
Другие методы включают в себя исследование характеристик и использование описанных выше методов для обыкновенных дифференциальных уравнений.
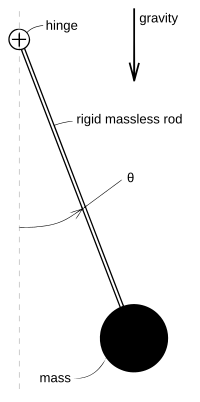 Иллюстрация маятника
Иллюстрация маятника  Линеаризации маятника
Линеаризации маятника Классической, широко изученной нелинейной задачей является динамика маятника под действием гравитация. Используя лагранжевую механику, можно показать, что движение маятника может быть описано безразмерным нелинейным уравнением

, где сила тяжести направлена «вниз» и 


, которое является неявным решением, включающим эллиптический интеграл. У этого «решения» обычно не так много применений, потому что большая часть природы решения скрыта в неэлементарном интеграле (неэлементарном, если 
Другой способ подойти к проблеме - линеаризовать любые нелинейности (член синусоидальной функции в данном случае) в различных точках интереса с помощью разложений Тейлора. Например, линеаризация при 

, поскольку 



, поскольку 


Еще одна интересная линеаризация возможна вокруг 


Это соответствует задаче свободного падения. Очень полезную качественную картину динамики маятника можно получить, собрав вместе такие линеаризации, как показано на рисунке справа. Для нахождения (точных) фазовых портретов и приблизительных периодов могут использоваться другие методы.