В математике, линеаризация находит линейное приближение к функции в заданная точка. Линейное приближение функции - это разложение Тейлора первого порядка вокруг интересующей точки. При исследовании динамических систем линеаризация - это метод оценки локальной устойчивости точки равновесия системы системы из нелинейные дифференциальные уравнения или дискретные динамические системы. Этот метод используется в таких областях, как инженерия, физика, экономика и экология.
Содержание
- 1 Линеаризация функции
- 2 Пример
- 3 Линеаризация функции многих переменных
- 4 Использование линеаризации
- 4.1 Анализ устойчивости
- 4.2 Микроэкономика
- 4.3 Оптимизация
- 4.4 Мультифизика
- 5 См. Также
- 6 Ссылки
- 7 Внешние ссылки
- 7.1 Учебные пособия по линеаризации
Линеаризация функции
Линеаризация функции - это строки - обычно строки, которые могут использоваться для расчетов. Линеаризация - эффективный метод аппроксимации вывода функции  при любом
при любом  на основе значения и наклона функции в
на основе значения и наклона функции в  , учитывая, что
, учитывая, что  дифференцируемо на
дифференцируемо на ![[a, b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935) (или
(или ![[b, a]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3015146003c7dab01d939e34e07159fa9604bc3) ) и что
) и что  близко к
близко к  . Короче говоря, линеаризация приближает результат функции около .
. Короче говоря, линеаризация приближает результат функции около .
Например,  . Однако что было бы хорошим приближением
. Однако что было бы хорошим приближением  ?
?
для любой данной функции , можно приблизить, если он находится рядом с известной дифференцируемой точкой. Самым основным требованием является то, что  , где
, где  - это линеаризация в . Форма точка-наклон уравнения образует уравнение прямой с заданной точкой
- это линеаризация в . Форма точка-наклон уравнения образует уравнение прямой с заданной точкой  и наклоном
и наклоном  . Общая форма этого уравнения:
. Общая форма этого уравнения:  .
.
Использование точки  , становится
, становится  . Поскольку дифференцируемые функции локально линейны, лучшим наклоном для замены будет наклон прямой касательной к at .
. Поскольку дифференцируемые функции локально линейны, лучшим наклоном для замены будет наклон прямой касательной к at .
Хотя концепция локальной линейности наиболее применима к точкам , произвольно близким к , относительно близкие значения относительно хорошо работают для линейных приближений. Наклон должен быть наиболее точно наклоном касательной в точке .
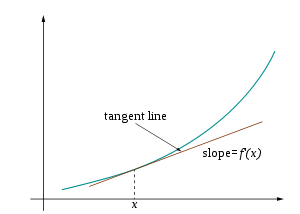
аппроксимация f (x) = x ^ 2 at (x, f (x))
Визуально на прилагаемой диаграмме показана касательная к в  . В
. В  , где
, где  - любое небольшое положительное или отрицательное значение, очень близко к значению касательной в точке
- любое небольшое положительное или отрицательное значение, очень близко к значению касательной в точке  .
.
Окончательное уравнение для линеаризации функции при равно:

для ,  . производная от равна
. производная от равна  , а наклон в равен
, а наклон в равен  .
.
Пример
Чтобы найти  , мы можем используйте тот факт, что . Линеаризация
, мы можем используйте тот факт, что . Линеаризация  в равно
в равно  , потому что функция
, потому что функция  определяет наклон функции в . Подставляя в
определяет наклон функции в . Подставляя в  , линеаризация в 4 составляет
, линеаризация в 4 составляет  . В данном случае
. В данном случае  , поэтому приблизительно равно
, поэтому приблизительно равно  . Истинное значение близко к 2.00024998, поэтому приближение линеаризации имеет относительную ошибку менее 1 миллионной доли процента.
. Истинное значение близко к 2.00024998, поэтому приближение линеаризации имеет относительную ошибку менее 1 миллионной доли процента.
Линеаризация функции многих переменных
Уравнение для линеаризации функции  в точке
в точке  равно:
равно:

общее уравнение для линеаризации функции многих переменных  в точке
в точке  :
:

где  - вектор переменных, а - интересующая точка линеаризации.
- вектор переменных, а - интересующая точка линеаризации.
Использование линеаризации
Линеаризация позволяет использовать инструменты для изучения линейных систем для анализа поведения нелинейной функции вблизи заданной точки. Линеаризация функции - это член первого порядка ее разложения Тейлора вокруг интересующей точки. Для системы, определяемой уравнением
 ,
,
линеаризованная система может быть записана как

где  - достопримечательность, а
- достопримечательность, а  - якобиан из
- якобиан из  с оценкой .
с оценкой .
Анализ стабильности
В анализе устойчивости автономных систем можно использовать собственные значения матрицы якобиана, вычисленные в точке гиперболического равновесия, чтобы определить природу этого равновесия. Это содержание теоремы о линеаризации. Для изменяющихся во времени систем линеаризация требует дополнительного обоснования.
Микроэкономика
В микроэкономике, правила принятия решений могут быть аппроксимированы пространством состояний подход к линеаризации. При таком подходе уравнения Эйлера задачи максимизации полезности линеаризуются вокруг стационарного устойчивого состояния. Затем находится уникальное решение результирующей системы динамических уравнений.
Оптимизация
В математической оптимизации функции затрат и нелинейные компоненты внутри могут быть линеаризованы по порядку применить метод линейного решения, такой как симплексный алгоритм. Оптимизированный результат достигается гораздо более эффективно и детерминирован как глобальный оптимум.
Мультифизика
В мультифизических системах - системах, включающих несколько физических полей, которые взаимодействуют друг с другом - линеаризация по отношению к каждому из физических полей. Эта линеаризация системы по отношению к каждому из полей приводит к линеаризованной монолитной системе уравнений, которую можно решить с использованием процедур монолитного итерационного решения, таких как метод Ньютона-Рафсона. Примеры этого включают сканеры МРТ, которые создают систему электромагнитных, механических и акустических полей.
См. Также
Ссылки
Внешние ссылки
Учебные пособия по линеаризации

 аппроксимация f (x) = x ^ 2 at (x, f (x))
аппроксимация f (x) = x ^ 2 at (x, f (x))