
Войти
Шестимерное пространство - это любое пространство, имеющее шесть измерений, шесть степеней свободы и требующее шести частей. данных или координат, чтобы указать местоположение в этом пространстве. Их бесконечно много, но наибольший интерес представляют более простые модели, моделирующие некоторые аспекты окружающей среды. Особый интерес представляет шестимерное евклидово пространство, в котором построены 6-многогранники и 5-сфера. Также изучаются шестимерные эллиптические пространства и гиперболические пространства с постоянной положительной и отрицательной кривизной.
Формально шестимерное евклидово пространство, ℝ, генерируется путем рассмотрения всех вещественных 6- кортежей как 6- векторов в этом пространстве.. Таким образом, он обладает свойствами всех евклидовых пространств, поэтому он линейен, имеет метрику и полный набор векторных операций. В частности, скалярное произведение между двумя 6-векторами легко определяется и может использоваться для вычисления метрики. Матрицы 6 × 6 могут использоваться для описания преобразований, таких как вращения, которые сохраняют исходную точку фиксированной.
В более общем плане любое пространство, которое может быть описано локально шестью координатами, не обязательно евклидовыми, является шестимерным. Одним из примеров является поверхность 6-сферы S. Это набор всех точек в семимерном пространстве (евклидово) ℝ, которые находятся на фиксированном расстоянии от начала координат. Это ограничение уменьшает количество координат, необходимых для описания точки на 6-сфере, на одну, поэтому она имеет шесть измерений. Такие неевклидовы пространства гораздо более распространены, чем евклидовы пространства, и в шести измерениях имеют гораздо больше приложений.
A Многогранник в шести измерениях называется 6-многогранником. Наиболее изучены правильные многогранники, из которых всего три в шести измерениях : 6-симплекс, 6-куб и 6-ортоплекс. Более широкое семейство - это однородные 6-многогранники, построенные из областей фундаментальной симметрии отражения, каждая область определяется группой Кокстера. Каждый равномерный многогранник определяется окольцованной диаграммой Кокстера-Дынкина. 6-полукуб - уникальный многогранник из семейства D6, а многогранники 221 и 122 из семейства E6.
| A6 | B6 | D6 | E6 | ||
|---|---|---|---|---|---|
 . 6-симплекс. . 6-симплекс. |  . 6-кубик. . 6-кубик. |  . 6-ортоплекс. . 6-ортоплекс. |  . 6-полукуб. . 6-полукуб. | 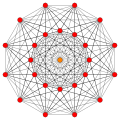 . 221. . 221. |  . 122. . 122. |
5-сфера, или гиперсфера в шести измерениях, - это пятимерная поверхность, равноудаленная от точки. Он имеет символ S, а уравнение для 5-сферы, радиус r, центр начала координат:

Объем шестимерного пространства ограничен этой 5-сферой будет

, равно 5,16771 × r, или 0,0807 наименьшего 6-куба, содержащего 5-сферу.
6-сфера, или гиперсфера в семи измерениях, - это шестимерная поверхность, равноудаленная от точки. Он имеет символ S, а уравнение для 6-сферы, радиус r, центр начала координат:

Объем пространства, ограниченного этим 6-сфера - это

который равно 4,72477 × r, или 0,0369 наименьшего 7-куба, содержащего 6-сферу.
В трехмерном пространстве жесткое преобразование имеет шесть степеней свободы, три смещения по трем координатным осям и три из группы вращения SO (3). Часто эти преобразования обрабатываются отдельно, поскольку они имеют очень разные геометрические структуры, но есть способы справиться с ними, которые рассматривают их как единый шестимерный объект.
В теории винта угловая и линейная скорости объединены в один шестимерный объект, называемый скручиванием . Подобный объект, называемый гаечным ключом, объединяет силы и крутящие моменты в шести измерениях. Их можно рассматривать как шестимерные векторы, которые линейно трансформируются при изменении системы отсчета. Сдвиги и вращения не могут быть выполнены таким образом, но связаны с поворотом посредством возведения в степень.
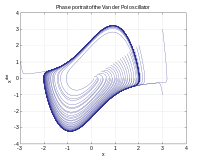 Фазовый портрет осциллятора Ван дер Поля
Фазовый портрет осциллятора Ван дер Поля Фазовое пространство - это пространство, состоящее из положение и импульс частицы, которые могут быть изображены вместе на фазовой диаграмме, чтобы выделить взаимосвязь между величинами. Обычная частица, движущаяся в трех измерениях, имеет фазовое пространство с шестью измерениями, слишком много для построения, но их можно проанализировать математически.
Группа вращения в четырех измерениях, SO (4) имеет шесть степеней свободы. Это можно увидеть, рассматривая матрицу 4 × 4, которая представляет поворот: поскольку это ортогональная матрица , матрица определяется с точностью до изменения знака, например, шесть элементов над главной диагональю. Но эта группа не является линейной и имеет более сложную структуру, чем другие приложения, которые видели до сих пор.
Другой способ взглянуть на эту группу - использовать умножение кватерниона . Каждое вращение в четырех измерениях может быть достигнуто умножением на пару единичных кватернионов, один до и один после вектора. Эти кватернионы уникальны, вплоть до смены знака для них обоих, и при таком использовании генерируют все вращения, поэтому произведение их групп S × S является двойным покрытием SO (4), который должен иметь шесть измерений.
Хотя пространство, в котором мы живем, считается трехмерным, у четырехмерного пространства есть практические приложения. Кватернионы, один из способов описания вращения в трех измерениях, состоят из четырехмерного пространства. Вращения между кватернионами, например, для интерполяции, происходят в четырех измерениях. Пространство-время, которое имеет три пространственных измерения и одно временное измерение, также четырехмерное, но с другой структурой, чем Евклидово пространство.
В электромагнетизме, электромагнитное поле обычно считается состоящим из двух вещей: электрического поля и магнитного поля. Оба они представляют собой трехмерные векторные поля, связанные друг с другом уравнениями Максвелла. Второй подход состоит в объединении их в один объект, шестимерный электромагнитный тензор, тензор или бивекторное представление электромагнитного поля. С помощью этого уравнения Максвелла можно сжать из четырех уравнений в одно особенно компактное уравнение:

где F - это бивекторная форма электромагнитного тензора, J - четырехтоковый, а ∂ - подходящий дифференциальный оператор.
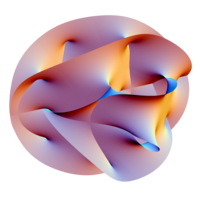 Калаби -Многообразие Яу (3D-проекция )
Калаби -Многообразие Яу (3D-проекция )В физике теория струн - это попытка описать общую теорию относительности и квантовую механику с помощью одного математическая модель. Хотя это попытка смоделировать нашу Вселенную, она имеет место в пространстве с большим количеством измерений, чем четыре пространства-времени, с которыми мы знакомы. В частности, ряд теорий струн имеет место в десятимерном пространстве, добавляя дополнительные шесть измерений. Эти дополнительные измерения требуются теорией, но, поскольку они не могут быть обнаружены, считаются совершенно другими, возможно компактифицированными, чтобы сформировать шестимерный спа ce с определенной геометрией, слишком малой для наблюдения.
С 1997 года появилась другая теория струн, которая работает в шести измерениях. Маленькие теории струн - это негравитационные теории струн в пяти и шести измерениях, возникающие при рассмотрении пределов десятимерной теории струн.
Ряд вышеупомянутых приложений могут быть связаны друг с другом алгебраически, рассматривая реальные шестимерные бивекторы в четырех измерениях. Их можно записать как Λℝ для множества бивекторов в евклидовом пространстве или Λℝ для множества бивекторов в пространстве-времени. Координаты Плюккера являются бивекторами в, тогда как электромагнитный тензор, обсуждаемый в предыдущем разделе, является бивектором в. Бивекторы могут использоваться для создания поворотов в или ℝ через экспоненциальное отображение (например, применение экспоненциального отображения всех бивекторов в Λℝ генерирует все вращения в). Они также могут быть связаны с общими преобразованиями в трех измерениях через однородные координаты, которые можно рассматривать как модифицированные вращения в.
Бивекторы возникают из суммы всех возможных произведений клина между парами 4-векторов. Следовательно, они имеют C4. 2 = 6 компонентов и в большинстве случаев могут быть записаны как

Они первые бивекторы, которые не могут быть все порождены произведением пар векторов. Те, которые могут быть простыми бивекторами, и вращениями, которые они создают, являются простыми вращениями. Другие вращения в четырех измерениях - это двойные и изоклинические вращения и соответствуют непростым бивекторам, которые не могут быть созданы с помощью одного клина.
6-векторы - это просто векторы шестимерного евклидова пространства. Как и другие подобные векторы, они являются линейными, их можно складывать, вычитать и масштабировать, как в других измерениях. Вместо использования букв алфавита в более высоких измерениях обычно используются суффиксы для обозначения размеров, поэтому общий шестимерный вектор можно записать a = (a 1, a 2, a 3, a 4, a 5, a 6). Записанные таким образом шесть базисных векторов : (1, 0, 0, 0, 0, 0), (0, 1, 0, 0, 0, 0), (0, 0, 1, 0, 0, 0), (0, 0, 0, 1, 0, 0), (0, 0, 0, 0, 1, 0) и (0, 0, 0, 0, 0, 1).
Из векторных операторов перекрестное произведение нельзя использовать в шести измерениях; вместо этого произведение клина двух 6-векторов приводит к бивектору с 15 измерениями. скалярное произведение двух векторов равно

Его можно использовать для определения угла между двумя векторами и нормой ,

Это можно использовать, например, для вычисления диагонали 6-куба ; с одним углом в начале координат, ребрами, выровненными по осям и длиной стороны 1, противоположный угол может быть в (1, 1, 1, 1, 1, 1), норма которого составляет

что является длиной вектор и так диагонали 6-куба.
В 1901 году Дж. Гиббс опубликовал работу о векторах, включающую шестимерную величину, которую он назвал бивектором. Он состоял из двух трехмерных векторов в одном объекте, который он использовал для описания эллипсов в трех измерениях. Он вышел из употребления, поскольку были разработаны другие методы, и теперь название бивектор более тесно связано с геометрической алгеброй.