
Войти
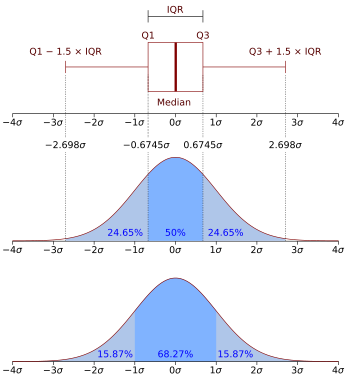 График и плотность вероятности функция нормального распределения N (0, σ).
График и плотность вероятности функция нормального распределения N (0, σ).  Геометрическая визуализация режима , медианы и среднего произвольная функция плотности вероятности.
Геометрическая визуализация режима , медианы и среднего произвольная функция плотности вероятности. В теории вероятностей, функция плотности вероятности (PDF ) или плотность из непрерывная случайная величина, является функцией , значение которой в любой заданной выборке (или точке) в пространстве выборки (набор возможных значений, принимаемых случайной величиной) может интерпретироваться как обеспечение относительной вероятности того, что значение случайной величины будет равно этой выборке. Другими словами, хотя абсолютная вероятность того, что непрерывная случайная переменная примет какое-либо конкретное значение, равна 0 (поскольку существует бесконечный набор возможных значений для начала), значение PDF для двух разных выборок может использоваться для вывода, насколько более вероятно, что случайная величина будет равна одной выборке по сравнению с другой выборкой, при любом конкретном розыгрыше случайной величины.
В более точном смысле PDF используется для определения вероятности попадания случайной величины в конкретный диапазон значений, в отличие от принятия какого-либо одного значения. Эта вероятность дается интегралом PDF этой переменной в этом диапазоне, то есть она дается площадью под функцией плотности, но над горизонтальной осью и между наименьшим и наибольшим значениями диапазона. Функция плотности вероятности везде неотрицательна, и ее интеграл по всему пространству равен 1.
Термины «функция распределения вероятностей» и «функция вероятности» также иногда использовались для обозначения функции плотности вероятности. Однако такое использование не является стандартным среди специалистов по теории вероятностей и статистиков. В других источниках «функция распределения вероятностей» может использоваться, когда распределение вероятностей определяется как функция по общим наборам значений, или оно может относиться к кумулятивной функции распределения, или может быть функцией вероятности и массы (PMF), а не плотностью. Сама «функция плотности» также используется для функции массы вероятности, что ведет к дальнейшему недоразумению. Однако в целом PMF используется в контексте дискретных случайных величин (случайных величин, принимающих значения в счетном наборе), в то время как PDF используется в контексте непрерывных случайных величин.
Предположим, бактерии определенного вида обычно живут от 4 до 6 часов. Вероятность того, что бактерия живет ровно 5 часов, равна нулю. Многие бактерии живут приблизительно 5 часов, но нет никаких шансов, что какая-либо конкретная бактерия погибнет ровно в 5.0000000000... часов. Однако вероятность того, что бактерия погибнет в период от 5 часов до 5,01 часа, поддается количественной оценке. Предположим, ответ 0,02 (т.е. 2%). Тогда вероятность того, что бактерия погибнет в период от 5 часов до 5,001 часа, должна быть около 0,002, поскольку этот временной интервал в десять раз меньше предыдущего. Вероятность того, что бактерия погибнет в период от 5 часов до 5.0001 часа, должна быть около 0,0002 и так далее.
В этих трех примерах соотношение (вероятность смерти во время интервала) / (продолжительность интервала) приблизительно постоянное и равно 2 в час (или 2 часа). Например, вероятность смерти 0,02 в интервале 0,01 часа от 5 до 5,01 часа, а (вероятность 0,02 / 0,01 часа) = 2 часа. Это количество в 2 часа называется плотностью вероятности смерти примерно через 5 часов. Следовательно, вероятность того, что бактерия погибнет через 5 часов, может быть записана как (2 часа) dt. Это вероятность того, что бактерия погибнет в бесконечно малом временном окне около 5 часов, где dt - продолжительность этого окна. Например, вероятность того, что он живет дольше 5 часов, но меньше (5 часов + 1 наносекунда), составляет (2 часа) × (1 наносекунда) ≈ 6 × 10 (с использованием преобразования единиц измерения 3,6 × 10 наносекунд = 1 час).
Существует функция плотности вероятности f с f (5 часов) = 2 часа. интеграл от f для любого временного окна (не только бесконечно малых, но и больших окон) - это вероятность того, что бактерия погибнет в этом окне.
Функция плотности вероятности чаще всего связана с абсолютно непрерывными одномерными распределениями. A случайная величина 

![\Pr[a\leq X\leq b]=\int _{a}^{b}f_{X}(x)\,dx.](https://wikimedia.org/api/rest_v1/media/math/render/svg/45fd7691b5fbd323f64834d8e5b8d4f54c73a6f8)
Следовательно, если 

и (если 

Интуитивно можно представить себе 
![[x,x+dx]](https://wikimedia.org/api/rest_v1/media/math/render/svg/f07271dbe3f8967834a2eaf143decd7e41c61d7a)
(Это определение может быть расширено до любого распределения вероятностей с использованием теории меры определение вероятности.)
A случайная величина 



То есть f - это любая измеримая функция со следующим свойством:
![\Pr[X\in A]=\int _{X^{-1}A}\,dP=\int _{A}f\,d\mu](https://wikimedia.org/api/rest_v1/media/math/render/svg/591b4a96fefea18b28fe8eb36d3469ad6b33a9db)
для любого измеримого множества
В непрерывном одномерном случае выше эталонной мерой является мера Лебега. Функция вероятности и массы дискретной случайной величины представляет собой плотность относительно счетной меры в пространстве выборки (обычно набор целых чисел или некоторые его подмножества).
Невозможно определить плотность со ссылкой на произвольную меру (например, нельзя выбрать счетную меру в качестве эталона для непрерывной случайной величины). Более того, когда он действительно существует, плотность почти везде уникальна.
В отличие от вероятности функция плотности вероятности может принимать значения больше единицы; например, равномерное распределение на интервале [0, ½] имеет плотность вероятности f (x) = 2 для 0 ≤ x ≤ ½ и f (x) = 0 в другом месте.
Стандартное нормальное распределение имеет плотность вероятности

Если задана случайная величина X и его распределение допускает функцию плотности вероятности f, то ожидаемое значение X (если ожидаемое значение существует) может быть вычислено как
![\operatorname {E} [X]=\int _{-\infty }^{\infty }x\,f(x)\,dx.](https://wikimedia.org/api/rest_v1/media/math/render/svg/00ce7a00fac378eafc98afb88de88d619e15e996)
Не каждое распределение вероятностей имеет функцию плотности: распределения дискретных случайных величин - нет; равно как и распределение Кантора, даже при том, что оно не имеет дискретной составляющей, т.е. не присваивает положительную вероятность какой-либо отдельной точке.
Распределение имеет функцию плотности тогда и только тогда, когда его кумулятивная функция распределения F (x) абсолютно непрерывна. В этом случае: F почти всюду дифференцируемо, и его производная может использоваться как плотность вероятности:

Если распределение вероятностей допускает плотность, то вероятность каждого одноточечного набора {a} равна нулю; то же самое верно для конечных и счетных множеств.
Две плотности вероятности f и g представляют одно и то же распределение вероятностей, если они различаются только на наборе Лебега нулевой меры.
в поле в статистической физике, неформальная переформулировка приведенного выше отношения между производной кумулятивной функции распределения и функцией плотности вероятности обычно используется в качестве определения функции плотности вероятности. Это альтернативное определение выглядит следующим образом:
Если dt - бесконечно малое число, вероятность того, что X входит в интервал (t, t + dt), равна f (t) dt, или:
Можно представить определенные дискретные случайные величины, а также случайные величины, включающие как непрерывную, так и дискретную часть, с помощью обобщенного функция плотности вероятности с использованием дельта-функции Дирака. (Это невозможно с функцией плотности вероятности в смысле, определенном выше, это может быть выполнено с распределением.) Например,, рассмотрим двоичную дискретную случайную величину, имеющую распределение Радемахера, то есть принимающее -1 или 1 для значений с вероятностью 1/2 каждое. Плотность вероятности, связанная с этой переменной, равна:

Более общие y, если дискретная переменная может принимать n различных значений среди действительных чисел, тогда соответствующая функция плотности вероятности имеет вид:

где 

Это существенно унифицирует обработку дискретных и непрерывных распределений вероятностей. Например, приведенное выше выражение позволяет определять статистические характеристики такой дискретной переменной (такие как ее среднее, ее дисперсия и ее эксцесс ), начиная с приведены формулы для непрерывного распределения вероятности.
Обычно функции плотности вероятности (и функции массы вероятности ) параметризуются, то есть характеризуются неопределенными параметрами . Например, нормальное распределение параметризуется в терминах среднего и дисперсии, обозначенных 

Важно помнить о различии между доменом семейства плотностей и параметров семейства. Разные значения параметров описывают разные распределения разных случайных величин на одном и том же пространстве выборки (один и тот же набор всех возможных значений переменной); это пространство выборки является областью семейства случайных величин, которое описывает это семейство распределений. Данный набор параметров описывает единичное распределение внутри семейства, разделяющее функциональную форму плотности. С точки зрения данного распределения параметры являются константами, а члены функции плотности, которые содержат только параметры, но не переменные, являются частью коэффициента нормализации распределения (мультипликативный коэффициент, который гарантирует, что площадь под плотностью - вероятность того, что что-то произойдет в области - равна 1). Этот коэффициент нормализации находится за пределами ядра распределения.
Поскольку параметры являются константами, повторная параметризация плотности в терминах различных параметров, чтобы дать характеристику другой случайной переменной в семействе, означает простую замену новых значений параметров в формулу вместо старых.. Однако изменение области определения плотности вероятности сложнее и требует дополнительных усилий: см. Раздел ниже, посвященный замене переменных.
Для непрерывных случайных величин X1,..., X n также можно определить плотность вероятности функция, связанная с множеством в целом, часто называемая совместной функцией плотности вероятности . Эта функция плотности определяется как функция n переменных, так что для любой области D в n-мерном пространстве значений переменных X 1,..., X n, вероятность того, что реализация набора переменных попадет в область D, равна

Если F (x 1,..., x n) = Pr (X 1 ≤ x 1,..., X n ≤ x n) - это кумулятивная функция распределения вектора (X 1,..., X n), тогда совместная функция плотности вероятности может быть вычислена как частная производная

Для i = 1, 2,..., n пусть f Xi(xi) будет функцией плотности вероятности, связанной только с переменной X i. Это называется функцией предельной плотности, и ее можно вывести из плотности вероятности, связанной со случайными величинами X 1,..., X n, путем интегрирования по всем значениям других n - 1 переменная:

Непрерывные случайные величины X 1,..., X n, допускающие плотность соединений все независимы друг от друга тогда и только тогда, когда

Если совместная функция плотности вероятности вектора из n случайных величин может быть разложена на произведение n функций одной переменной

(где каждое f i не обязательно является плотностью), то все n переменных в наборе независимы друг от друга, и функция предельной плотности вероятности каждой из них задается как

Этот элементарный пример иллюстрирует приведенное выше определение многомерных функций плотности вероятности в простом случае функции от набора двух переменных. Назовем 

Если функция плотности вероятности случайной величины (или вектора) X задана как f X (x), можно (но часто не обязательно; см. Ниже) вычислить функцию плотности вероятности некоторой переменной Y = g (X). Это также называется «заменой переменной» и на практике используется для генерации случайной величины произвольной формы f g (X) = f Y с использованием известного (например, равномерного) генератора случайных чисел.
Заманчиво думать, что для того, чтобы найти математическое ожидание E (g (X)), нужно сначала найти плотность вероятности f g (X) новой случайной величины Y = g (X). Однако вместо вычисления

вместо этого можно найти

Значения двух интегралов одинаковы во всех случаях, когда и X, и g (X) фактически имеют функции плотности вероятности. Необязательно, чтобы g была однозначной функцией. В некоторых случаях последний интеграл вычисляется намного проще, чем первый. См. Закон бессознательного статистика.
Пусть 

Здесь g обозначает обратную функцию.
Это следует из того факта, что вероятность, содержащаяся в дифференциальной области, должна быть инвариантным относительно замены переменных. То есть

или

Для функций, которые не являются монотонными, функция плотности вероятности для y равна

где n (y) - количество решения по x уравнения 

Вышеупомянутые формулы могут быть обобщены для переменных (которые мы снова будем называть y) в зависимости от более чем одной другой переменной. f (x 1,..., x n) должно обозначать функцию плотности вероятности переменных, от которых зависит y, и зависимость должна быть y = g (x 1,…, x n). Тогда результирующая функция плотности будет

где интеграл берется по всему (n - 1) -мерному решению уравнения с индексами, а символическое dV должно быть заменено параметризацией этого решения для конкретного вычисления; переменные x 1,..., x n в таком случае, конечно, являются функциями этой параметризации.
Это происходит из следующего, возможно, более интуитивного представления: Предположим, x - это n-мерная случайная величина с совместной плотностью f. Если y = H (x ), где H - биективная, дифференцируемая функция, то y имеет плотность g:
![{\displaystyle g(\mathbf {y})=f{\Big (}H^{-1}(\mathbf {y}){\Big)}\left\vert \det \left[{\frac {dH^{-1}(\mathbf {z})}{d\mathbf {z} }}{\Bigg \vert }_{\mathbf {z} =\mathbf {y} }\right]\right\vert }](https://wikimedia.org/api/rest_v1/media/math/render/svg/c6d564757b3f48359e65d6c05fe801fa60aaa72d)
с дифференциалом, рассматриваемым как якобиан обратной величины H (.), Вычисляемой как y.
. Например, в двумерном случае x = (x 1, x 2), предположим, что преобразование H задано как y 1 = H 1(x1, x 2), y 2 = H 2(x1, x 2) с обратными x 1 = H 1(y1, y 2), x 2 = H 2(y1, y 2). Совместное распределение для y = (y 1, y 2) имеет плотность

Пусть 






Этот результат приводит к Закону бессознательного статистика :
![{\displaystyle \operatorname {E} _{Y}[Y]=\int _{\mathbb {R} }yf_{Y}(y)dy=\int _{\mathbb {R} }y\int _{{\mathbb {R} }^{n}}f_{X}(\mathbf {x})\delta {\big (}y-V(\mathbf {x}){\big)}\,d\mathbf {x} dy=\int _{{\mathbb {R} }^{n}}\int _{\mathbb {R} }yf_{X}(\mathbf {x})\delta {\big (}y-V(\mathbf {x}){\big)}\,dyd\mathbf {x} =\int _{{\mathbb {R} }^{n}}V(\mathbf {x})f_{X}(\mathbf {x})d\mathbf {x} =\operatorname {E} _{X}[V(X)].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0cd5acec96860375eea687a2904e06361df92c61)
Доказательство:
Пусть 



 .
.Ясно, что 
 ,
,который является верхним треугольная матрица с единицами на главной диагонали, поэтому ее определитель равен 1. Применяя теорему о замене переменной из предыдущего раздела, получаем, что
 ,
,который, если его маргинализировать более чем
Функция плотности вероятности суммы двух независимых случайных величин U и V, каждая из которых имеет функцию плотности вероятности, является свертка их отдельных функций плотности:

Можно обобщить предыдущее соотношение на сумму N независимых случайных величин с плотностями U 1,..., U N:

Это можно получить из двухсторонней замены переменных с участием Y = U + V и Z = V, аналогично приведенному ниже примеру для частного независимых случайных величин.
Даны две независимые случайные величины U и V, каждая из которых имеет функцию плотности вероятности, плотность произведения Y = UV и частное Y = U / V можно вычислить заменой переменных.
Чтобы вычислить частное Y = U / V двух независимых случайных величин U и V, определите следующее преобразование:


Тогда совместная плотность p (y, z) может быть вычислена заменой переменных с U, V на Y, Z, и Y может быть получен путем маргинализации Z из плотности соединения.
Обратное преобразование:


Матрица Якоби 

Таким образом:

И распределение Y может быть вычислено путем маргинализации Z:

Этот метод критически требует, чтобы преобразование из U, V в Y, Z было биективным. Вышеупомянутое преобразование соответствует этому, потому что Z может быть отображено непосредственно обратно в V, и для данного V отношение U / V является монотонным. То же самое и для суммы U + V, разности U - V и произведения UV.
Точно такой же метод можно использовать для вычисления распределения других функций от нескольких независимых случайных величин.
Для двух стандартных нормальных переменных U и V, частное можно вычислить следующим образом. Во-первых, переменные имеют следующие функции плотности:


Преобразуем, как описано выше:
Это приводит к:
![{\displaystyle {\begin{aligned}p(y)=\int _{-\infty }^{\infty }p_{U}(yz)\,p_{V}(z)\,|z|\,dz\\[5pt]=\int _{-\infty }^{\infty }{\frac {1}{\sqrt {2\pi }}}e^{-{\frac {1}{2}}y^{2}z^{2}}{\frac {1}{\sqrt {2\pi }}}e^{-{\frac {1}{2}}z^{2}}|z|\,dz\\[5pt]=\int _{-\infty }^{\infty }{\frac {1}{2\pi }}e^{-{\frac {1}{2}}(y^{2}+1)z^{2}}|z|\,dz\\[5pt]=2\int _{0}^{\infty }{\frac {1}{2\pi }}e^{-{\frac {1}{2}}(y^{2}+1)z^{2}}z\,dz\\[5pt]=\int _{0}^{\infty }{\frac {1}{\pi }}e^{-(y^{2}+1)u}\,duu={\tfrac {1}{2}}z^{2}\\[5pt]=\left.-{\frac {1}{\pi (y^{2}+1)}}e^{-(y^{2}+1)u}\right]_{u=0}^{\infty }\\[5pt]={\frac {1}{\pi (y^{2}+1)}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/59d9a9e9626c22660b6e3e67169802d996cf0f1c)
This is the density of a standard Cauchy distribution.
