
Войти
A нормальный режим колебательной системы - это модель движения, в которой все части системы перемещайте синусоидально с той же частотой и с фиксированным соотношением фаз. Свободное движение, описываемое нормальными модами, происходит на фиксированных частотах. Эти фиксированные частоты нормальных режимов системы известны как ее собственные частоты или резонансные частоты. Физический объект, такой как здание, мост или молекула, имеет набор нормальных режимов и их собственные частоты, которые зависят от его структуры, материалов и граничных условий. В музыке обычные формы вибрирующих инструментов (струн, воздуховодов, барабанов и т. Д.) Называются «гармониками» или «обертонами».
Наиболее общее движение системы - это суперпозиция ее нормальных режимов. Эти моды являются нормальными в том смысле, что они могут перемещаться независимо, то есть возбуждение одной моды никогда не вызовет движение другой моды. С математической точки зрения, нормальные режимы ортогональны друг другу.
 Вибрация одиночной нормальной моды круглого диска с закрепленным граничным условием по всей внешней кромке. См. Другие режимы.
Вибрация одиночной нормальной моды круглого диска с закрепленным граничным условием по всей внешней кромке. См. Другие режимы. Фотовспышка чашки черного кофе, вибрирующей в нормальных режимах
Фотовспышка чашки черного кофе, вибрирующей в нормальных режимах  Воспроизведение мультимедиа Возбуждение в нормальных режимах в капле воды во время эффекта Лейденфроста
Воспроизведение мультимедиа Возбуждение в нормальных режимах в капле воды во время эффекта Лейденфроста В волновая теория физики и техники, мода в динамической системе - это стоячая волна состояние возбуждения, в котором все компоненты системы будет изменяться синусоидально на фиксированной частоте, связанной с этим режимом.
Поскольку ни одна реальная система не может идеально вписаться в структуру стоячей волны, концепция режима используется как общая характеристика конкретных состояний колебаний, таким образом, динамическая система рассматривается в линейном виде, в котором линейный может выполняться суперпозиция состояний.
Классические примеры включают
Большинство динамических систем могут возбуждаться в нескольких режимах, возможно одновременно. Каждая мода характеризуется одной или несколькими частотами в зависимости от поля модальных переменных. Например, вибрирующий канат в двухмерном пространстве определяется одной частотой (одномерное осевое смещение), а колеблющийся канат в трехмерном пространстве определяется двумя частотами (двухмерное осевое смещение).
Для заданной амплитуды модальной переменной каждый режим будет сохранять определенное количество энергии из-за синусоидального возбуждения.
Нормальный или доминирующий режим системы с несколькими режимами будет режимом, сохраняющим минимальное количество энергии для данной амплитуды модальной переменной, или, что эквивалентно, для данного сохраненного количества энергии, доминирующим mode будет режимом, устанавливающим максимальную амплитуду модальной переменной.
Режим вибрации характеризуется модальной частотой и формой моды. Он нумеруется в соответствии с количеством полуволн в вибрации. Например, если вибрирующая балка с обоими закрепленными концами отображает форму моды, равную половине синусоидальной волны (один пик на вибрирующей балке), она будет вибрировать в режиме 1. Если бы у нее была полная синусоида (один пик и одна впадина).) он будет вибрировать в режиме 2.
В системе с двумя или более измерениями, такой как изображенный диск, каждому измерению присваивается номер режима. Используя полярные координаты, мы получаем радиальную координату и угловую координату. Если один измеряется от центра наружу по радиальной координате, можно встретить полную волну, поэтому номер моды в радиальном направлении равен 2. Другое направление сложнее, потому что только половина диска рассматривается из-за антисимметричной ( также называется кососимметрией ) характер колебания диска в угловом направлении. Таким образом, измеряя 180 ° в угловом направлении, вы столкнетесь с полуволной, поэтому номер моды в угловом направлении равен 1. Таким образом, номер моды системы составляет 2–1 или 1-2, в зависимости от того, какая координата считается «первая» и которая считается «второй» координатой (поэтому важно всегда указывать, какой номер режима соответствует каждому направлению координат).
В линейных системах каждый режим полностью независим от всех других режимов. В общем, все режимы имеют разные частоты (более низкие моды имеют более низкие частоты) и разные формы колебаний.
 Форма колебаний барабанной мембраны с узловыми линиями, показанными бледно-зеленым
Форма колебаний барабанной мембраны с узловыми линиями, показанными бледно-зеленым В одномерной системе в данном режиме вибрация будет иметь узлы или места, где происходит смещение. всегда ноль. Эти узлы соответствуют точкам формы колебаний, где форма колебаний равна нулю. Поскольку вибрация системы задается формой моды, умноженной на функцию времени, смещение узловых точек всегда остается нулевым.
При расширении до двухмерной системы эти узлы становятся линиями, где смещение всегда равно нулю. Если вы посмотрите анимацию выше, вы увидите два круга (один примерно на полпути между краем и центром, а другой - на самом краю) и прямую линию, разделяющую диск пополам, где смещение близко к нулю. В идеализированной системе эти линии в точности равны нулю, как показано справа.
Рассмотрим два равных тела (не подверженных гравитации), каждое из масс м, прикрепленных к трем пружинам, каждый с жесткостью пружины k. Они прикрепляются следующим образом, образуя систему, которая является физически симметричной:

, где краевые точки зафиксированы и не могут двигаться. Мы будем использовать x 1 (t) для обозначения горизонтального смещения левой массы и x 2 (t) для обозначения смещения правой масса.
Если один обозначает ускорение (вторая производная от x (t) по времени) как 

Поскольку мы ожидаем колебательное движение нормального режима (где ω одинаково для обеих масс), мы пытаемся:

Подставляя их в уравнения движения, мы получаем:

Поскольку экспоненциальный множитель является общим для всех членов, мы опускаем его и упрощаем:

И в матрице представление:

Если матрица слева обратима, единственное решение - это тривиальное решение (A 1, A 2) = (x 1, x 2) = (0, 0). Нетривиальные решения должны быть найдены для тех значений ω, при которых матрица слева является сингулярной, т.е. не обратима. Отсюда следует, что определитель матрицы должен быть равен 0, поэтому:

Решая для 

Если мы подставим ω 1 в матрицу и решим для (A 1, A 2), получаем (1, 1). Если мы подставим ω 2, получим (1, −1). (Эти векторы являются собственными векторами, а частоты являются собственными значениями.)
Первая нормальная мода:

Что соответствует двум массам, движущимся в одном направлении одновременно. Этот режим называется антисимметричным.
Второй нормальный режим:

Это соответствует к массам, движущимся в противоположных направлениях, при этом центр масс остается неподвижным. Этот режим называется симметричным.
Общее решение - это суперпозиция нормальных режимов, где c 1, c 2, φ 1 и φ 2 определяются начальными условиями задачи.
Продемонстрированный здесь процесс можно обобщить и сформулировать, используя формализм лагранжевой механики или гамильтоновой механики.
A стоячая волна представляет собой непрерывную форму нормального режима. В стоячей волне все элементы пространства (т.е. координаты (x, y, z)) колеблются с одной и той же частотой и в фазе (достигая равновесия точки вместе), но у каждого разная амплитуда.

Общая форма стоячей волны:

где ƒ (x, y, z) представляет собой зависимость амплитуды от местоположение и косинус \ синус - колебания во времени.
Физически стоячие волны образуются в результате интерференции (суперпозиции) волн и их отражений (хотя можно также сказать и обратное: движущаяся волна представляет собой суперпозицию стоячих волн). Геометрическая форма среды определяет, что будет интерференционной картиной, таким образом, определяет форму ƒ (x, y, z) стоячей волны. Эта пространственная зависимость называется нормальным режимом .
Обычно для задач с непрерывной зависимостью от (x, y, z) нет единственного или конечного числа нормальных режимов, но существует бесконечно много нормальных режимов. Если проблема ограничена (т.е. определена на конечном участке пространства), существует счетное количество нормальных режимов (обычно пронумерованных n = 1, 2, 3,...). Если проблема не ограничена, существует непрерывный спектр нормальных режимов.
В любом твердом теле при любой температуре первичные частицы (например, атомы или молекулы) не являются стационарными, а скорее колеблются относительно средних положений. В изоляторах способность твердого тела накапливать тепловую энергию почти полностью обусловлена этими колебаниями. Многие физические свойства твердого тела (например, модуль упругости) можно предсказать, зная частоты, с которыми колеблются частицы. Простейшее предположение (Эйнштейна) состоит в том, что все частицы колеблются вокруг своего среднего положения с одной и той же собственной частотой ν. Это эквивалентно предположению, что все атомы независимо колеблются с частотой ν. Эйнштейн также предположил, что разрешенные энергетические состояния этих колебаний являются гармониками или целыми кратными hν. Спектр форм волны может быть описан математически с использованием ряда Фурье синусоидальных флуктуаций плотности (или тепловых фононов ).
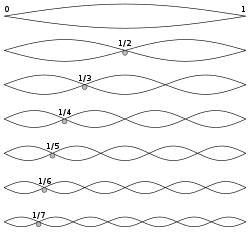 основной тон и первые шесть обертонов вибрирующей струны. Математика распространения волны в кристаллических твердых телах состоит из рассмотрения гармоник как идеального ряда Фурье синусоидальных флуктуаций плотности (или атомных смещений волны).
основной тон и первые шесть обертонов вибрирующей струны. Математика распространения волны в кристаллических твердых телах состоит из рассмотрения гармоник как идеального ряда Фурье синусоидальных флуктуаций плотности (или атомных смещений волны). Впоследствии Дебай признал, что каждый осциллятор всегда тесно связан со своими соседними осцилляторами. Таким образом, заменив идентичные несвязанные осцилляторы Эйнштейна на такое же количество связанных осцилляторов, Дебай коррелировал упругие колебания одномерного твердого тела с числом математически особых видов колебаний натянутой струны (см. Рисунок). Чистый тон самого низкого тона или частоты называется основным, а кратные этой частоте - его гармоническими обертонами. Он присвоил одному из осцилляторов частоту основной вибрации всего блока твердого тела. Он назначил оставшимся осцилляторам частоты гармоник этой основной гармоники, причем самая высокая из всех этих частот ограничивалась движением самого маленького первичного блока.
Нормальные режимы вибрации кристалла, как правило, представляют собой суперпозицию многих обертонов, каждый из которых имеет соответствующую амплитуду и фазу. Более длинноволновые (низкие частоты) фононы - это как раз те акустические колебания, которые рассматриваются в теории звука. Как продольные, так и поперечные волны могут распространяться через твердое тело, в то время как, как правило, только продольные волны поддерживаются жидкостями.
В продольной моде смещение частиц из их положений равновесия совпадает с направлением распространения волны. Механические продольные волны также называют волнами сжатия. Для поперечных мод отдельные частицы движутся перпендикулярно распространению волны.
Согласно квантовой теории, средняя энергия нормальной моды колебаний кристаллического твердого тела с характеристической частотой ν равна:

Член (1/2) hν представляет "нулевой -точная энергия », или энергия, которую осциллятор будет иметь при абсолютном нуле. E (ν) стремится к классическому значению kT при высоких температурах
![E (v) = kT \ left [1 + {\ frac {1} {12}} \ left ({\ frac { hv} {kT}} \ right) ^ {2} + O \ left ({\ frac {hv} {kT}} \ right) ^ {4} + \ cdots \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e66e51588cd9349e495e59f92b1cd3a75c36aee6)
Зная термодинамическую формулу,

энтропия для нормального режима:
![{\ begin {align} S \ left (v \ right) = \ int _ {0} ^ {T} {\ frac {d} {dT}} E \ left (v \ right) { \ frac {dT} {T}} \\ [10pt] = {\ frac {E \ left (v \ right)} {T}} - k \ log \ left (1-e ^ {- {\ frac { час v} {kT}}} \ right) \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a96a54afcf6f98c1fc7ab08dec312ecfcb00fa16)
Свободная энергия равна:

который для kT>>hν стремится к:

Чтобы вычислить внутреннюю энергию и удельную теплоемкость, мы должны знать количество нормальных форм колебаний и частоту между значениями ν и ν + dν. Пусть это число будет f (ν) dν. Поскольку общее количество нормальных режимов равно 3N, функция f (ν) определяется выражением:

Интегрирование производится по всем частотам кристалла. Тогда внутренняя энергия U будет определяться следующим образом:

В квантовой механике состояние 



- это плотность вероятности для измерения частицы в месте x в время t.
Обычно, когда задействован какой-то потенциал, волновая функция раскладывается на суперпозицию энергетических собственных состояний, каждое из которых колеблется с частотой 

Собственные состояния имеют физический смысл дальше, чем ортонормированный базис. Когда энергия системы измерена, волновая функция коллапсирует до одного из своих собственных состояний, и поэтому волновая функция частицы описывается чистым собственным состоянием, соответствующим измеренной энергии.
Нормальные моды генерируются в земле из-за длинноволновых сейсмических волн от сильных землетрясений, мешающих формированию стоячих волн.
Для упругой, изотропной, однородной сферы возникают сфероидальные, тороидальные и радиальные (или дышащие) режимы. Сфероидальные моды включают только волны P и SV (например, волны Рэлея ) и зависят от номера обертона n и углового порядка l, но имеют вырождение азимутального порядка m. Увеличение l концентрирует фундаментальную ветвь ближе к поверхности, а при больших l стремится к волнам Рэлея. Тороидальные моды включают только волны SH (например, волны Лява ) и не существуют во внешнем ядре жидкости. Радиальные моды - это всего лишь подмножество сфероидальных мод с l = 0. Вырождения не существует на Земле, поскольку оно нарушается вращением, эллиптичностью и трехмерной неоднородной структурой скорости и плотности.
Мы либо предполагаем, что каждая мода может быть изолирована, приближение самосвязи, либо что многие моды близки по частоте резонансной, приближение перекрестной связи. Самосвязывание изменит только фазовую скорость, а не количество волн вокруг большого круга, что приведет к растяжению или сжатию структуры стоячих волн. Перекрестная связь может быть вызвана вращением Земли, приводящим к смешению основных сфероидальных и тороидальных мод, или асферической структурой мантии или эллиптичностью Земли.