
Войти
 Двумерный поток, который в выделенной точке имеет только компонент скорости деформации, без средней скорости или компонента вращения.
Двумерный поток, который в выделенной точке имеет только компонент скорости деформации, без средней скорости или компонента вращения. В механике сплошной среды, то тензор деформации скорости или скорости изменения напряжения тензор является физической величиной, которая описывает скорость изменения от деформации материала в окрестности некоторой точки, в определенный момент времени. Она может быть определена как производная от тензора деформации по отношению к времени, или в качестве симметричного компонента градиента (производной по отношению к положению) от скорости потока. В механике жидкости это также можно описать как градиент скорости, меру того, как скорость жидкости изменяется между различными точками внутри жидкости. Хотя этот термин может относиться к различиям в скорости между слоями потока в трубе, он часто используется для обозначения градиента скорости потока относительно его координат. Эта концепция имеет значение в различных областях физики и техники, включая магнитогидродинамику, горное дело и водоочистку.
Тензор скорости деформации - это чисто кинематическая концепция, описывающая макроскопическое движение материала. Следовательно, это не зависит от природы материала или от сил и напряжений, которые могут на него действовать; и это применимо к любой непрерывной среде, будь то твердой, жидкой или газовой.
С другой стороны, для любой жидкости, кроме сверхтекучей, любое постепенное изменение ее деформации (т. Е. Ненулевой тензор скорости деформации) приводит к возникновению вязких сил внутри ее из-за трения между соседними жидкостными элементами, которые стремятся противодействовать этому изменению.. В любой точке жидкости эти напряжения могут быть описаны тензором вязких напряжений, который почти всегда полностью определяется тензором скорости деформации и некоторыми внутренними свойствами жидкости в этой точке. Вязкое напряжение также возникает в твердых телах в дополнение к упругому напряжению, наблюдаемому при статической деформации; когда он слишком велик, чтобы его можно было игнорировать, материал называют вязкоупругим.
Выполняя анализ размеров, можно определить размеры градиента скорости. Размеры скорости есть, а размеры расстояния есть. Поскольку градиент скорости можно выразить как. Таким образом, градиент скорости имеет те же размеры, что и это соотношение, то есть.
В 3-х измерениях градиент скорости представляет собой тензор второго порядка (см. Ниже), который можно транспонировать как матрицу :
можно разложить на сумму симметричной матрицы и кососимметричной матрицы следующим образом
называется тензором скорости деформации и описывает скорость растяжения и сдвига. называется тензором спина и описывает скорость вращения.
Сэр Исаак Ньютон предположил, что напряжение сдвига прямо пропорционально градиенту скорости:
Константа пропорциональности,, называется динамической вязкостью.
Рассмотрим материальное тело, твердое или жидкое, которое течет и / или движется в пространстве. Пусть v - поле скорости внутри тела; то есть гладкая функция из ℝ 3 × ℝ такая, что v ( p, t) - это макроскопическая скорость материала, проходящего через точку p в момент времени t.
Скорость v ( p + r, t) в точке, смещенной от p на небольшой вектор r, можно записать в виде ряда Тейлора :
где ∇ v градиент поля скорости, понимаемый как линейная карта, которая переводит вектор смещения r в соответствующее изменение скорости.
 Общее поле v ( p + r).
Общее поле v ( p + r).  Постоянная часть v ( p).
Постоянная часть v ( p).  Линейная часть (∇ v) ( p, t) ( r).
Линейная часть (∇ v) ( p, t) ( r).  Нелинейная невязка. Поле скоростей v ( p + r, t) произвольного обтекания точки p (красная точка) в некоторый момент t и члены его приближения Тейлора первого порядка относительно p. Третья компонента скорости (вне экрана) везде считается равной нулю.
Нелинейная невязка. Поле скоростей v ( p + r, t) произвольного обтекания точки p (красная точка) в некоторый момент t и члены его приближения Тейлора первого порядка относительно p. Третья компонента скорости (вне экрана) везде считается равной нулю. В произвольной системе отсчета, ∇ v связана с матрицы Якоби поля, а именно в 3 -х измерениях это матрица 3 × 3
где v i - компонент v, параллельный оси i, а ∂ j f обозначает частную производную функции f по пространственной координате x j. Обратите внимание, что J является функцией p и t.
В этой системе координат приближение Тейлора для скорости вблизи p имеет вид
или просто
если v и r рассматриваются как матрицы 3 × 1.
 Симметричная часть E ( p, t) ( r) (скорость деформации) линейного члена примера потока.
Симметричная часть E ( p, t) ( r) (скорость деформации) линейного члена примера потока.  Антисимметричная часть R ( p, t) ( r) (вращение) линейного члена.
Антисимметричная часть R ( p, t) ( r) (вращение) линейного члена. Любую матрицу можно разложить на сумму симметричной матрицы и антисимметричной матрицы. Применяя это к матрице Якоби J = (∇ v) T с симметричной и антисимметричной компонентами E и R соответственно:
Это разложение не зависит от системы координат и поэтому имеет физическое значение. Тогда поле скоростей можно аппроксимировать как
то есть,
Антисимметричный член R представляет собой жесткое вращение жидкости вокруг точки p. Его угловая скорость равна
Произведение ∇ × v называется ротором вращения векторного поля. Жесткое вращение не изменяет относительного положения элементов жидкости, поэтому антисимметричный член R градиента скорости не влияет на скорость изменения деформации. Таким образом, фактическая скорость деформации описывается симметричным членом E, который является тензором скорости деформации.
 Скалярная часть D ( p, t) ( r) (скорость равномерного расширения или сжатия) тензора скорости деформации E ( p, t) ( r).
Скалярная часть D ( p, t) ( r) (скорость равномерного расширения или сжатия) тензора скорости деформации E ( p, t) ( r). 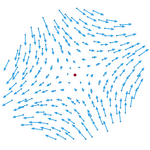 Бесследная часть S ( p, t) ( r) (скорость сдвига) тензора скорости деформации E ( p, t) ( r).
Бесследная часть S ( p, t) ( r) (скорость сдвига) тензора скорости деформации E ( p, t) ( r). Симметричный член E градиента скорости (тензор скорости деформации) может быть далее разбит как сумма скаляра, умноженного на единичный тензор, что представляет собой постепенное изотропное расширение или сжатие; и бесследный симметричный тензор, который представляет собой постепенную деформацию сдвига без изменения объема:
То есть,
Здесь δ - единичный тензор, такой, что δ ij равно 1, если i = j, и 0, если i ≠ j. Это разложение не зависит от выбора системы координат и, следовательно, имеет физическое значение.
Тензор скорости расширения равен 1/3от дивергенции поля скоростей:
это скорость, с которой объем фиксированного количества жидкости увеличивается в этой точке.
Тензор скорости сдвига представлен симметричной матрицей 3 × 3 и описывает поток, который объединяет потоки сжатия и расширения вдоль трех ортогональных осей, так что объем не изменяется. Этот тип потока возникает, например, когда резиновую полоску растягивают за концы, или когда мед падает с ложки гладкой непрерывной струей.
Для двумерного потока дивергенция v имеет только два члена и количественно определяет изменение площади, а не объема. Фактор 1/3 в члене коэффициента расширения следует заменить на1/2 в таком случае.
Изучение градиентов скорости полезно при анализе материалов, зависящих от траектории, и при последующем изучении напряжений и деформаций; например, пластическая деформация из металлов. Пристенный градиент скорости несгоревших реагентов, вытекающих из трубы, является ключевым параметром для характеристики стабильности пламени. Градиент скорости плазмы может определять условия для решений основных уравнений магнитной гидродинамики.
Рассмотрим поле скоростей жидкости, текущей по трубе. Слой жидкости, контактирующий с трубой, обычно находится в состоянии покоя по отношению к трубе. Это называется условием прилипания. Если разница скоростей между слоями жидкости в центре трубы и по сторонам трубы достаточно мала, то течение жидкости наблюдается в виде сплошных слоев. Этот тип течения называется ламинарным.
Скорость потока разность между соседними слоями может быть измерена в терминах градиента скорости, задается. Где - разница в скорости потока между двумя слоями, а - расстояние между слоями.












 .
.














