
Войти

Динамика полета - это наука ориентации и управления транспортным средством в воздухе в трех измерениях. Три критических параметра динамики полета - это углы поворота в трех измерениях относительно центра тяжести (cg) транспортного средства, известные как тангаж, крен и рыскание.
Системы управления регулируют ориентацию автомобиля относительно его центра тяжести. Система управления включает в себя управляющие поверхности, которые при отклонении создают момент (или пару от элеронов) вокруг ЦТ, который вращает самолет по тангажу, крену и рысканью. Например, момент тангажа возникает из-за силы, приложенной на расстоянии вперед или назад от cg, заставляя летательный аппарат наклоняться вверх или вниз.
Крен, тангаж и рыскание относятся к поворотам вокруг соответствующих осей, начиная с определенного состояния равновесия установившегося полета. Угол равновесного крена известен как уровень крыльев или нулевой угол крена.
Наиболее распространенное авиационное соглашение определяет крен как действие относительно продольной оси, положительное при опущенном правом (правом) крыле. Рыскание относительно вертикальной оси корпуса положительно, носом вправо. Шаг - это ось, перпендикулярная продольной плоскости симметрии, положительный нос вверх.
A самолет с неподвижным крылом увеличивает или уменьшает подъемную силу, создаваемую крыльями, когда он наклоняет нос вверх или вниз, увеличивая или уменьшая угол атаки (AOA). Угол крена также известен как угол крена на самолете с неподвижным крылом, который обычно «крен», чтобы изменить горизонтальное направление полета. Самолет имеет обтекаемую форму от носа до хвоста для уменьшения лобового сопротивления, что позволяет поддерживать угол бокового скольжения близким к нулю, хотя самолет может быть намеренно «смещен в сторону» для увеличения лобового сопротивления и скорости снижения во время при посадке, чтобы самолет оставался таким же, как курс ВПП во время посадки с боковым ветром и во время полета с асимметричной мощностью.
 рыскание
рыскание  тангаж
тангаж  крен
крен  рыскание или определение угла курса
рыскание или определение угла курса  тангаж определение угла
тангаж определение угла 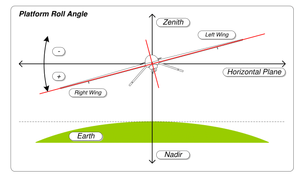 определение угла крена
определение угла крена Три правосторонних, декартовых систем координат часто используются в динамике полета. Первая система координат имеет начало координат, зафиксированное в системе отсчета Земли:
Во многих приложениях динамики полета предполагается, что система отсчета Земли инерциальна с плоским x E,yE-плоскость, хотя земная рамка также может рассматриваться как сферическая система координат с началом в центре Земли.
Две другие системы отсчета закреплены на теле, их исходные точки перемещаются вместе с летательным аппаратом, обычно в центре тяжести. Для самолета, симметричного справа налево, рамы могут быть определены как:
Асимметричные самолеты имеют аналогичные неподвижные корпуса, но для выбора должны использоваться другие соглашения укажите точное направление осей x и z.
Кадр Земли - удобный кадр для выражения поступательной и вращательной кинематики самолета. Кадр Земли также полезен тем, что при определенных предположениях он может быть аппроксимирован инерционным. Кроме того, одна сила, действующая на самолет, - вес, - фиксируется в направлении + z E.
Каркас корпуса часто представляет интерес, потому что начало координат и оси остаются фиксированными относительно самолета. Это означает, что относительная ориентация кадров Земли и тела описывает положение самолета. Кроме того, направление силы тяги обычно фиксируется в раме корпуса, хотя некоторые самолеты могут изменять это направление, например, с помощью вектора тяги.
Ветровая рама представляет собой удобную раму для выражения аэродинамических сил и моментов. действуя на самолете. В частности, чистая аэродинамическая сила может быть разделена на составляющие вдоль осей ветровой рамы, с силой сопротивления в направлении -x w и подъемная сила в направлении -z w.
 Мнемоника для запоминания названий углов
Мнемоника для запоминания названий углов В дополнение к определению опорных кадров может быть определена относительная ориентация опорных кадров. Относительная ориентация может быть выражена в различных формах, в том числе:
Различные углы Эйлера, относящиеся к трем системам отсчета, важны для динамики полета. Существует много соглашений об углах Эйлера, но все последовательности поворота, представленные ниже, используют соглашение z-y'-x ". Это соглашение соответствует типу углов Тейта-Брайана, которые обычно называют Это соглашение подробно описывается ниже для углов Эйлера крена, тангажа и рыскания, которые описывают ориентацию корпуса тела по отношению к кадру Земли. Другие наборы углов Эйлера описаны ниже по аналогии.
К преобразовать из кадра Земли в корпус тела с помощью углов Эйлера, следующие повороты выполняются в предписанном порядке. Сначала поверните оси системы координат Земли x E и y E вокруг оси z E на угол рыскания ψ. В результате получается промежуточная система отсчета с осями, обозначенными x ', y', z ', где z' = z E. Во-вторых, поверните Оси x 'и z' вокруг оси y 'на угол наклона θ. Это приводит к другой промежуточной системе отсчета с осями, обозначенными x ", y", z ", где y" = y'. Наконец, поверните y "и z " оси вокруг оси x "на угол крена φ. Опорная рамка, которая получается после трех вращений, - это рамка тела.
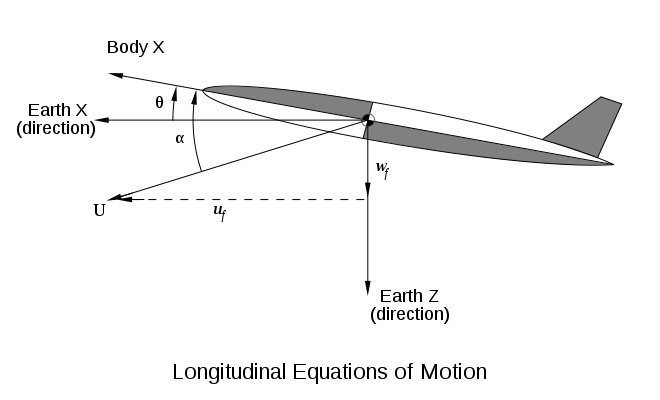
На основе приведенных выше соглашений о вращениях и осях, угол рыскания ψ - это угол между севером и проекцией продольной оси самолета на горизонтальную плоскость, угол тангажа θ - это угол между продольной осью самолета и по горизонтали, а угол крена φ представляет собой вращение вокруг продольной оси самолета после поворота по рысканью и тангажу.
Для преобразования из системы координат Земли в систему координат ветра три угла Эйлера - это угол крена μ, угол траектории полета γ и угол курса σ. При выполнении поворотов, описанных выше, для получения кадра ветра из кадра Земли, (μ, γ, σ) аналогичны (φ, θ, ψ) соответственно. Курсовой угол σ - это угол между севером и горизонтальной составляющей вектора скорости, который описывает, в каком направлении летательный аппарат движется относительно сторон света. Угол траектории полета γ - это угол между горизонталью и вектором скорости, который описывает, набирает ли самолет или спускается. Угол крена μ представляет собой вращение подъемной силы вокруг вектора скорости, что может указывать на то, разворачивается ли самолет.
. Для перехода от системы ветра к корпусу два угла Эйлера равны угол атаки α и угол бокового скольжения β. При выполнении вращений, описанных ранее, чтобы получить раму тела из ветровой рамы, (α, β) аналогичны (θ, ψ), соответственно; угол, аналогичный φ в этом преобразовании, всегда равен нулю. Угол β бокового скольжения представляет собой угол между вектором скорости и проекцией продольной оси летательного аппарата на плоскость x w,yw, который описывает, есть ли поперечный компонент скорости летательного аппарата, также известный как боковое скольжение. Угол атаки α представляет собой угол между плоскостью x w,ywи продольной осью летательного аппарата и, среди прочего, является важной переменной при определении величины подъемной силы.
При анализе устойчивости самолета обычно учитывают возмущения относительно номинального устойчивого состояния полета. Таким образом, анализ может быть применен, например, в предположении:
Скорость, высота и Триммерный угол атаки различен для каждого условия полета, кроме того, самолет будет по-разному настроен, например на малой скорости закрылки могут быть раскрыты, а шасси может быть опущено.
За исключением (или при значительном боковом скольжении), продольные уравнения движения (включая тангаж и подъемную силу) могут рассматриваться независимо от бокового движения (включая крен и рыскание).
Далее рассматриваются возмущения относительно номинальной прямой и горизонтальной траектории полета.
Для упрощения анализа (относительно) предполагается, что управляющие поверхности фиксируются на протяжении всего движения, это устойчивость с фиксацией ручки. Анализ без прилипания требует дальнейшего усложнения учета движения рулевых поверхностей.
Кроме того, предполагается, что полет происходит в неподвижном воздухе, и самолет рассматривается как твердое тело.
Три силы действуют на самолет в полет: вес, тяга и аэродинамическая сила.
Выражение для вычислить аэродинамическую силу:

где:
 Разница между статическим давлением и свободным текущим давлением
Разница между статическим давлением и свободным текущим давлением вектор внешней нормали элемента области
вектор внешней нормали элемента области вектор касательного напряжения, применяемый воздухом к телу
вектор касательного напряжения, применяемый воздухом к телу адекватная опорная поверхность
адекватная опорная поверхность, спроецированная на оси ветра, получаем:

где:
 Drag
Drag Боковое усилие
Боковое усилие Lift
LiftДинамическое давление свободного течения
Правильная ссылка поверхность (поверхность крыла, в случае плоскости )
Коэффициент лобового сопротивления
Коэффициент поперечной силы
Необходимо знать C p и C f в каждой точке рассматриваемого поверхность.
При отсутствии тепловых эффектов есть три замечательных безразмерных числа:
где:
 скорость звука
скорость звука  коэффициент теплоемкости
коэффициент теплоемкости  газовая постоянная на единицу массы
газовая постоянная на единицу массы абсолютная температура
абсолютная температура  средний свободный пробег
средний свободный пробег Согласно λ существует три возможных степени разрежения, и соответствующие им движения называются:



В динамике полета движение тела в потоке рассматривается как непрерывный ток. Во внешнем слое пространства, окружающего тело вязкость будет незначительной. Однако влияние вязкости необходимо учитывать при анализе потока вблизи пограничного слоя.
В зависимости от сжимаемости потока можно учитывать различные виды токов:
Если геометрия тела фиксирована и в случае симметричного полета (β = 0 и Q = 0), коэффициенты давления и трения являются функциями, зависящими от:


где:
 угол атаки
угол атаки  рассматриваемая точка поверхности
рассматриваемая точка поверхностиВ этих условиях сопротивление и коэффициент подъемной силы равны функции зависят исключительно от угла атаки корпуса и Маха и чисел Рейнольдса. Аэродинамическая эффективность, определяемая как соотношение между коэффициентами подъемной силы и сопротивления, также будет зависеть от этих параметров.

Также возможно получить зависимость коэффициента сопротивления от коэффициент подъемной силы. Это соотношение известно как уравнение коэффициента сопротивления:
 Уравнение коэффициента сопротивления
Уравнение коэффициента сопротивленияАэродинамическая эффективность имеет максимальное значение, E max, относительно C L, где касательная линия от начала координат касается сопротивления график уравнения коэффициента.
Коэффициент лобового сопротивления C D можно разложить двумя способами. Первое типичное разложение разделяет эффекты давления и трения:

Есть второе типичное разложение, учитывающее определение уравнения коэффициента сопротивления. Это разложение разделяет влияние коэффициента подъемной силы в уравнении, получая два члена C D0 и C Di. C D0 известен как коэффициент паразитного сопротивления, и это базовый коэффициент тяги при нулевой подъемной силе. C Di известен как коэффициент индуцированного сопротивления и создается подъемной силой тела.

Хорошая попытка определения коэффициента индуцированного сопротивления означает параболическую зависимость подъемной силы

Аэродинамическая эффективность теперь рассчитывается как:

Если конфигурация плоскости симметрична относительно плоскости XY, минимальный коэффициент сопротивления равно паразитному сопротивлению самолета.

Если конфигурация асимметрична Однако по отношению к плоскости XY флаг минимума отличается от паразитного сопротивления. В этих случаях можнопроследить новое приближенное уравнение параболического сопротивления, оставив минимальное значение сопротивления при нулевом значении подъемной силы.


Коэффициент давления изменяется с числом Маха в соответствии с приведенным ниже использованием:

где
Это соотношение достаточно точно для 0,3 < M < 0.7 and when M = 1 it becomes ∞ which is impossible physical situation and is called сингулярности Прандтля - Глауэрта.
см. Продольная статическая устойчивость
Направленная устойчивость или устойчивость флюгера соответствует с статической устойчивостью самолета относительно оси z. Так же, как и в случае некоторой устойчивости, желательно, чтобы летательный аппарат имел тенденцию возвращаться в равновесие, когда он подвергается некоторому состоянию нарушения рыскания. Для этого наклонного момента рыскания должен быть положительным. Самолет, обладающий таким режимом устойчивости, всегда указывать в сторону относительного ветра, отсюда и название «устойчивость флюгера».
Обычной практикой является выведение типичного уравнения четвертого порядка для описания продольного движения, а факторизация он примерно в высокочастотном режим и низкочастотный режим. Используемый здесь основан на использовании качественных знаний о поведении воздушного судна для упрощения с помощью самого начала и достижения результата с помощью более доступного маршрута.
Два продольных движения (режим) называются короткопериодными колебаниями основного тона (SPPO) и фугоидом.
Короткий ввод (в терминологии систем управления - импульс ) по тангажу (обычно через руль высоты в стандартном самолете с неподвижным крылом), как правило, приводит к перерегулированию относительно состояния дифферента. Переход характеризует затухающим гармоническим движением относительно нового дифферента. Траектория очень мало изменяется за время необходимое, для затухания колебаний.
Обычно это колебание имеет частоту (следовательно, короткий период) и затухает в течение нескольких секунд. Пример из реальной жизни: пилот выбирает новое положение для набора высоты, например, нос на 5 ° вверх от исходного положения. Можно использовать короткое резкое оттягивание рулевой колонки назад, что обычно приводит к колебаниям относительно нового состояния дифферента. Если колебания слабо затухают, самолету потребуется длительный период времени, чтобы прийти в новое состояние, что может привести к колебаниям, вызванным пилотом. Если режим короткого периода нестабилен, пилот, как правило, не может управлять летательным аппаратом в любом периоде времени.
Это затухание гармоническое движение называется короткопериодным колебанием тангажа, оно возникает из-за тенденций стабильного летательного аппарата к точке в целом. направление полета. По своей природе он очень похож на режим флюгера ракетных или ракетных конфигураций. Движение включает, главным образом, высоту тона 




где 



где m - масса . По характеру движения изменение скорости 


Но блок распределения распределением на тело и корпус давления к вектору скорости. Но набор осей скорости (ветра) не является инерциальной системой , поэтому мы должны преобразовать силы фиксированных осей в оси ветра. Кроме того, нас интересует только сила, действующая вдоль оси z:

или:

На словах сила ветра равна центростремительному ускорению.
Уравнение момента - это производная по времени от углового момента :

где M - момент тангажа, а B - момент инерции относительно оси тангажа. Пусть: 


Нас интересуют только возмущения сил и моментов, вызванные возмущениями в состояниях
 Подъем за счет падения, это отрицательно, потому что ось Z направлена вниз, а положительное падение вызывает силу, направленную вверх.
Подъем за счет падения, это отрицательно, потому что ось Z направлена вниз, а положительное падение вызывает силу, направленную вверх. Подъем из-за скорости тангажа возникает из-за увеличения угла падения хвоста, следовательно, тоже отрицательный, но небольшой по сравнению с .
Подъем из-за скорости тангажа возникает из-за увеличения угла падения хвоста, следовательно, тоже отрицательный, но небольшой по сравнению с . Момент тангажа из-за падения - термин статической устойчивости. Статическая стабильность требует, чтобы это было отрицательным.
Момент тангажа из-за падения - термин статической устойчивости. Статическая стабильность требует, чтобы это было отрицательным. Момент тангажа из-за скорости шага - член демпфирования шага, он всегда отрицателен.
Момент тангажа из-за скорости шага - член демпфирования шага, он всегда отрицателен.как хвост работает в поле потока крыла, изменения угла наклона крыла вызывают изменения в потоке вниз, но существует задержка для изменения потока крыла, чтобы повлиять на подъемную силу, это представлено как момент, пропорциональный к скорости изменения угла атаки:

Эффект отложенного смыва вниз увеличивает подъем хвоста и создает момент опускания носа, поэтому
Уравнения движения с малыми силами и моментами возмущения принимают следующий вид:


Их можно изменить, чтобы получить урожай второго порядка линейное дифференциальное уравнение в

Представляет затухание простое гармоническое движение.
Мы должны ожидать, что 

Если ручка удерживается неподвижно, дрон не будет поддерживать прямой и горизонтальный полет (за исключением маловероятного случая, когда он идеально сбалансирован для горизонтального полета на текущей высоте и настройку тяги), но начинает нырять, выравниваться и снова набирать высоту. Он будет повторять этот цикл, пока не вмешается пилот. Это длительное колебание скорости и высоты называется режимом фугоида. Это анализируется, исходя из предположения, что SSPO выполняет свою надлежащую функцию и поддерживает угол атаки около своего номинального значения. Основное влияние оказывает два состояния: угол траектории полета 

, что означает, что центростремительная сила равна возмущение подъемной силы.
Для скорости, разрешающей по траектории:

где g - ускорение свободного падения у поверхности земли. Ускорение по траектории равно чистой силе по оси x минус компонент веса. Не следует ожидать, что существенные аэродинамические производные будут зависеть от угла траектории полета, поэтому только 

Уравнения движения принимают следующий вид:


Они могут быть выражены как уравнение второго порядка для угла траектории полета или скорости возмущение:

Теперь подъемная сила почти равна массе:

где 



Период t фугоид T получается из коэффициента при u:

Или:

Поскольку подъемная сила намного больше сопротивления, фугоид в лучшем случае слегка демпфируется. Пропеллер с фиксированной скоростью может помочь. Сильное демпфирование вращения по тангажу или большая инерция вращения увеличивают связь между короткопериодными и фугоидными модами, так что они изменяют фугоид.
Для симметричной ракеты или ракеты курсовая устойчивость на рысканье такая же, как и устойчивость по тангажу; он напоминает короткопериодные колебания тангажа с плоскостью рыскания, эквивалентной производным устойчивости тангажа. По этой причине курсовая устойчивость по тангажу и рысканью вместе известна как устойчивость ракеты "флюгером".
Самолету не хватает симметрии между тангажом и рысканием, поэтому курсовая устойчивость при рысканье определяется другим набором производных устойчивости. Плоскость рыскания, эквивалентная короткопериодным колебаниям тангажа, который описывает курсовую устойчивость плоскости рыскания, называется голландским креном. В отличие от движений в плоскости тангажа, боковые режимы включают как крен, так и рыскание.
Принято выводить уравнения движения путем формальной манипуляции, что для инженера представляет собой математическую ловкость рук. Текущий подход следует за анализом плоскости шага при формулировании уравнений в терминах достаточно знакомых концепций.
Применение импульса с помощью педалей руля направления должно вызвать голландский крен, то есть колебания по крену и рысканью, с отставанием от рыскания по крену на четверть цикла, так что законцовки крыла следуют эллиптические траектории относительно самолета.
Уравнение поступательного движения в плоскости рыскания, как и в плоскости тангажа, приравнивает центростремительное ускорение к боковой силе.

где 
Уравнения моментов немного сложнее. Условие дифферента - это когда самолет находится под углом атаки относительно воздушного потока. Ось x тела не совпадает с вектором скорости, который является опорным направлением для осей ветра. Другими словами, оси ветра не являются главными осями (масса не распределяется симметрично относительно осей рыскания и крена). Рассмотрим движение элемента массы в позиции -z, x в направлении оси y, то есть в плоскости бумаги.

Если скорость вращения равна p, скорость частицы равна:

Сила, действующая на эту частицу, состоит из двух членов. во-первых, пропорциональна скорости изменения v, во-вторых, из-за изменения направления этого компонента скорости при движении тела. Последние члены приводят к перекрестным произведениям малых количеств (pq, pr, qr), которые позже отбрасываются. В данном анализе они с самого начала отброшены для ясности. Фактически, мы предполагаем, что направление скорости частицы из-за одновременных скоростей крена и рыскания существенно не меняется на протяжении всего движения. С этим упрощающим предположением ускорение частицы становится:

Момент рыскания определяется по формуле:

Существует дополнительный момент рыскания из-за смещения частиц в направление y:
Момент рыскания путем суммирования по всем частицам тела:

где N - момент рыскания, E - произведение инерции, а C - момент инерции относительно оси рыскания. Аналогичное рассуждение приводит к уравнению крена:

где L - момент качения, A - момент инерции качения.
Состояния: 
 Боковое усилие из-за бокового скольжения (при отсутствии рыскания).
Боковое усилие из-за бокового скольжения (при отсутствии рыскания).Боковое скольжение боковую силу от киля и фюзеляжа. Кроме того, если крыло имеет двугранную форму, боковое скольжение при положительном угле увеличивает угол падения правого крыло и уменьшает его уменьшение на левом борту, в результате чего результирующая сила прямо противоположна стороны бокового скольжения. Размах крыльев назад оказывает такое же влияние на угол падения, но, поскольку крылья не наклонены в вертикальной плоскости, один обратный поворот не влияет на
 Боковая сила из-за скорости крена.
Боковая сила из-за скорости крена.Скорость крена вызывает на плавник, что создает соответствующую боковую силу. Кроме того, положительный крен (правое крыло вниз) увеличивает силу на правом крыле. Если крыло имеет двугранный вид, это приведет к тому, что боковая сила на мгновение будет противодействовать боковым эффектом в результате кому скольжению. Конфигурации углового крыла и / или стабилизатора могут привести к изменению знака боковой силы, если эффект плавника подавлен.
 Боковая сила из-за скорости рыскания.
Боковая сила из-за скорости рыскания.Рыскание создается боковые силы из-за падения на руль направления, киль и фюзеляж.
 Момент рыскания из-за сил бокового скольжения.
Момент рыскания из-за сил бокового скольжения.Боковое скольжение при отсутствии руля приводит к падению на фюзеляж и оперение, создавая таким образом момент рыскания, которому противодействует только направленная жесткость, которая будет иметь тенденцию указывать нос самолета назад против ветра в условиях горизонтального полета. В условиях бокового скольжения при заданном угле крена
 Момент рыскания из-за скорости крена.
Момент рыскания из-за скорости крена.Скорость крена создает подъемную силу плавника, вызывающую рыскание, а также по-разному изменяет подъемную силу на крыльях, таким образом влияя на вклад индуцированного сопротивления каждого крыла, вызывающий (небольшой) вклад момента рыскания. Положительный крен обычно приводит к положительным значениям
 Момент рыскания из-за скорости рыскания.
Момент рыскания из-за скорости рыскания.Ввод скорости рыскания при любом угле крена генерирует векторы силы руля, киля и фюзеляжа, которые доминируют в результирующем моменте рыскания.. Рыскание также увеличивает скорость внешнего крыла, одновременно замедляя внутреннее крыло, с соответствующими изменениями сопротивления, вызывающими (небольшой) противоположный момент рыскания.
 Момент качения из-за бокового скольжения.
Момент качения из-за бокового скольжения.Положительный угол бокового скольжения создает угол оперения, который может вызывать положительный или отрицательный момент крена в зависимости от его конфигурации. При любом ненулевом угле бокового скольжения двугранные крылья вызывают крутящий момент, который стремится вернуть самолет в горизонтальное положение, как и крылья с обратной стреловидностью. В случае крыльев с большой стреловидностью результирующий момент качения может быть чрезмерным для всех требований устойчивости, и можно использовать угол наклона для компенсации эффекта момента качения, вызванного стреловидностью крыла. 
 Момент качения из-за скорости рыскания.
Момент качения из-за скорости рыскания.Рыскание увеличивает скорость внешнего крыла, одновременно снижая скорость внутреннего крыла, вызывая вращающий момент внутренняя сторона. Вклад ребра обычно поддерживает этот эффект качения внутрь, если только он не компенсируется угловым стабилизатором над осью крена (или двугранным под осью крена).
 Момент качения из-за скорости крена.
Момент качения из-за скорости крена.Крен создает противодействующие силы вращения как на правом, так и на левом крыле, а также создает такие силы на оперении. Эти противоположные эффекты момента качения должны преодолеваться входом элеронов, чтобы поддерживать скорость крена. Если крен остановлен при ненулевом угле крена, то
Поскольку Голландский крен является режимом обработки, аналогичным короткопериодным колебаниям шага, любое влияние, которое оно могло бы оказать на траекторию, можно игнорировать. Скорость тела r складывается из скорости изменения угла бокового скольжения и скорости поворота. Принимая последнее за ноль, предполагая, что это не влияет на траекторию, для ограниченной цели изучения голландского разворота:

Уравнения рысканья и крена с производными устойчивости становятся:
 (рыскание)
(рыскание) (roll)
(roll)Инерционный момент из-за переката ускорение считается небольшим по сравнению с аэродинамическими условиями, поэтому уравнения принимают следующий вид:


Это становится уравнением второго порядка, определяющим скорость крена или скольжение:

Уравнение для скорость крена идентична. Но угол крена, 

Если p - затухающее простое гармоническое движение, то же самое и
Устойчивость требует, чтобы термины «жесткость » и «демпфирование» были положительными. Это:
 (демпфирование)
(демпфирование) (жесткость)
(жесткость)В знаменателе преобладает
Учитывая термин "жесткость": 
В параметре демпфирования преобладает произведение демпфирование крена и производные демпфирования рыскания отрицательны, поэтому их произведение положительно. Поэтому голландский рулон должен быть демпфированным.
Движение сопровождается небольшим боковым перемещением центра тяжести, и более «точный» анализ представит термины в
Дергание рукояти в сторону и возвращение ее в центр вызывает чистое изменение ориентации рулона.
Креновое движение характеризуется отсутствием естественной устойчивости, отсутствуют производные устойчивости, которые создают моменты в ответ на инерционный угол крена. Помехи крена вызывают скорость крена, которая отменяется только пилотом или вмешательством автопилота. Это происходит при незначительных изменениях скорости скольжения или рыскания, поэтому уравнение движения сводится к:

Если просто удерживать ручку неподвижно, при старте с крыльями, близкими к горизонтальному, самолет обычно будет иметь тенденцию постепенно отклоняться в сторону от прямой траектории полета. Это (слегка нестабильная) спиральная мода .
При изучении траектории интерес представляет скорее направление вектора скорости, чем направление тела. Направление вектора скорости при проецировании на горизонталь будет называться треком, обозначенным 


где g - ускорение свободного падения, а U - скорость.
Включая производные устойчивости:

Ожидается, что скорость крена и рыскания будет небольшой, поэтому вклад
Скорость скольжения и крена изменяется постепенно, поэтому их временные производные игнорируются. Уравнения рыскания и крена сводятся к:
 (рыскание)
(рыскание) (roll)
(roll)Решение для


Подстановка бокового скольжения и скорости крена в уравнение силы приводит к уравнению первого порядка по углу крена:

Это экспоненциальный рост или спад, в зависимости от того, является ли коэффициент 
Поскольку спиральный режим имеет длительную постоянную времени, пилот может вмешаться, чтобы эффективно стабилизировать его, но самолету с нестабильным голландским креном будет трудно летать. Обычно самолет проектируется с устойчивым голландским режимом крена, но слегка режим нестабильной спирали.
|




![\ Equiv C_ {d} = {\ dfrac {D} {qS}} = - {\ dfrac {1} {S}} \ int _ {\ Sigma} [(- C_ {p}) {\ math bf {n}} \ bullet {\ mathbf {i_ {w}}} + C_ {f} {\ mathbf {t}} \ bullet {\ mathbf {i_ {w}}}] \, d \ sigma](https://wikimedia.org/api/rest_v1/media/math/render/svg/b16598ab4310bdfb79e62c3b3ffa8fb3d7356bea)
![\ Equiv C_ { Q} = {\ dfrac {Q} {qS}} = - {\ dfrac {1} {S}} \ int _ {\ Sigma} [(- C_ {p}) {\ mathbf {n}} \ bullet { \ mathbf {j_ {w}}} + C_ {f} {\ mathbf {t}} \ bullet {\ mathbf {j_ {w}}}] \, d \ sigma](https://wikimedia.org/api/rest_v1/media/math/render/svg/058ae7bf706024c1943fc8d36eb6ca9a35653039)
![\ Equiv C_ {L} = {\ dfrac {L} {qS}} = - {\ dfrac {1} {S}} \ int _ {\ Sigma} [(- C_ {p}) {\ mathbf {n}} \ bullet {\ mathbf {k_ {w}}} + C_ {f } {\ mathbf {t}} \ bullet {\ mathbf {k_ {w}}}] \, d \ sigma](https://wikimedia.org/api/rest_v1/media/math/render/svg/a92e802e0eb8cad0e69f7849d35e2b6dbec96a1b)



