 . . |
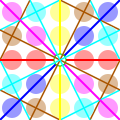
| Одномерные подпространства в двумерном векторном пространстве по конечному полю F5. origin (0, 0), отмеченный зелеными кружками, принадлежит любому из шести 1-подпространств, в то время как каждая из 24 оставшихся точек принадлежит ровно одной; свойство, которое выполняется для 1-подпространств над любым полем и во всех измерениях. Все F5(т.е. квадрат 5 × 5) изображено четыре раза для лучшей визуализации |
В математике, а более конкретно в линейной алгебре, linear подпространство, также известное как векторное подпространство, представляет собой векторное пространство, которое является подмножеством некоторого большего векторного пространства. Линейное подпространство обычно просто называют подпространством, когда контекст служит, чтобы отличить его от других типов подпространств.
Содержание
- 1 Определение
- 2 Примеры
- 2.1 Пример I
- 2.2 Пример II
- 2.3 Пример III
- 2.4 Пример IV
- 3 Свойства подпространств
- 4 Описание
- 4.1 Системы линейных уравнений
- 4.2 Пустое пространство матрицы
- 4.3 Линейные параметрические уравнения
- 4.4 Диапазон векторов
- 4.5 Пространство столбцов и пространство строк
- 4.6 Независимость, базис и размерность
- 5 Операции и отношения над подпространствами
- 5.1 Включение
- 5.2 Пересечение
- 5.3 Сумма
- 5.4 Решетка подпространств
- 5.5 Ортогональные дополнения
- 6 Алгоритмы
- 6.1 Основа для строки пространство
- 6.2 Принадлежность к подпространству
- 6.3 Основа для пространства столбцов
- 6.4 Координаты для вектора
- 6.5 Основа для нулевого пространства
- 6.6 Основа для суммы и пересечения двух подпространств
- 6.7 Уравнения для подпространства
- 7 См. Также
- 8 Примечания
- 9 Учебники
- 10 Внешние ссылки
Определение
Если V - векторное пространство над полем K и если W является подмножеством V, то W является подпространством в V, если под операции над V, W - векторное пространство над K. Эквивалентно, непустое подмножество W является подпространством V, если, всякий раз, когда  являются элементами W и
являются элементами W и  являются элементами K, из этого следует, что
являются элементами K, из этого следует, что  находится в W.
находится в W.
Как следствие, все векторные пространства снабжены как минимум двумя подпространства: синглтон устанавливает с нулевым вектором и самим векторным пространством. Они называются тривиальными подпространствами векторного пространства.
Примеры
Пример I
Пусть поле K будет набором Rдействительных чисел, и пусть векторное пространство V будет действительным координатным пространством R. Возьмем W как набор всех векторов в V, последняя компонента которых равна 0. Тогда W является подпространством V.
Доказательство:
- Дано u и v в W, то они могут быть выражены как u = (u 1, u 2, 0) и v = ( v 1, v 2, 0). Тогда u+ v= (u 1+v1, u 2+v2, 0 + 0) = (u 1+v1, u 2+v2, 0). Таким образом, u+ vтакже является элементом W.
- Учитывая u в W и скаляр c в R, если u = (u 1, u 2, 0) снова, тогда c u = (cu 1, cu 2, c0) = (cu 1, cu 2, 0). Таким образом, c u также является элементом W.
Пример II
Пусть поле снова будет R, но теперь пусть векторное пространство V будет Декартова плоскость R. Возьмем W как набор точек (x, y) в R таких, что x = y. Тогда W является подпространством R.

Проиллюстрированный пример II
Доказательство:
- Пусть p = (p 1, p 2) и q = (q 1, q 2) - элементы W, то есть точки на плоскости такие, что p 1 = p 2 и q 1 = q 2. Тогда p+ q= (p 1+q1, p 2+q2); поскольку p 1 = p 2 и q 1 = q 2, то p 1 + q 1 = p 2 + q 2, поэтому p+ qявляется элементом W.
- Пусть p = ( p 1, p 2) быть элементом W, то есть точкой на плоскости, такой что p 1 = p 2, и пусть c будет скаляром в R . Тогда c p = (cp 1, cp 2); поскольку p 1 = p 2, тогда cp 1 = cp 2, поэтому c p является элементом of W.
В общем, любое подмножество реального координатного пространства R, которое определяется системой однородных линейных уравнений, будет давать подпространство. (Уравнение в примере I было z = 0, а уравнение в примере II было x = y.) Геометрически эти подпространства представляют собой точки, линии, плоскости и пространства, которые проходят через точку 0.
Пример III
Снова возьмите поле как R, но теперь пусть векторное пространство V будет набором R всех функций от R до R . Пусть C (R ) будет подмножеством, состоящим из непрерывных функций. Тогда C (R ) является подпространством R.
Доказательство:
- Мы знаем из исчисления, что 0 ∈ C (R ) ⊂ R.
- Мы знаем из исчисления, что сумма непрерывных функций непрерывна.
- Опять же, мы знаем из исчисления, что произведение непрерывной функции и числа является непрерывным.
Пример IV
Сохранение того же поля и векторного пространства как и раньше, но теперь рассмотрим набор Diff (R ) всех дифференцируемых функций. Те же аргументы, что и раньше, показывают, что это тоже подпространство.
Примеры, расширяющие эти темы, распространены в функциональном анализе.
Свойства подпространств
Из определения векторных пространств следует, что подпространства непусты и являются закрытый по суммам и по скалярным кратным. Эквивалентно подпространства можно охарактеризовать свойством замкнутости относительно линейных комбинаций. То есть непустое множество W является подпространством тогда и только тогда, когда каждая линейная комбинация конечного множества элементов W также принадлежит W. Эквивалентное определение утверждает, что оно также эквивалентно рассматривать линейные комбинации двух элементов одновременно.
В топологическом векторном пространстве X подпространство W не обязательно должно быть топологически замкнутым, но конечномерное подпространство всегда замкнуто. То же самое верно для подпространств конечной коразмерности (то есть подпространств, определяемых конечным числом непрерывных линейных функционалов ).
Описания
Описания подпространств включают набор решений для однородной системы линейных уравнений, подмножество евклидова пространства, описываемого системой однородных линейных параметрических уравнения, диапазон коллекции векторов и пустое пространство, пространство столбца и пространство строки матрица. Геометрически (особенно над полем действительных чисел и его подполями) подпространство - это плоский в n-пространстве, которое проходит через начало координат.
Естественным описанием 1-подпространства является скалярное умножение одного не нулевого вектора v на все возможные скалярные значения. 1-подпространства, заданные двумя векторами, равны тогда и только тогда, когда один вектор может быть получен из другого скалярным умножением:

Эта идея обобщена для более высоких измерений с линейной продолжительностью, но критерии для равенства k-пространств, заданных наборами из k векторов, не так просты.
A двойное описание обеспечивается с помощью линейных функционалов (обычно реализованных в виде линейных уравнений). Один не нулевой линейный функционал F задает свое ядро подпространство F = 0 коразмерности 1. Подпространства коразмерности 1, заданные двумя линейными функционалы равны, если и только если один функционал может быть получен из другого скалярным умножением (в дуальном пространстве ):

Он обобщен для более высоких коразмерностей с помощью системы уравнений. Следующие два подраздела представят это последнее описание подробно, а остальные четыре подраздела дополнительно описывают идею линейного диапазона.
Системы линейных уравнений
Решение, заданное для любой однородной системы линейных уравнений с n переменными, является подпространством в координатном пространстве K:
![\ left \ {\ left [\! \! {\ begin {array} {c} x_ {1} \\ x_ { 2} \\\ vdots \\x_{n}\end{array}}\!\!\right]\in K^{n}:{\begin{alignedat}{6}a_{11}x_{1}\;+\;a_{12}x_{2}\;+\cdots +\;a_{1n}x_{n}\;=0\\a_{21}x_{1}\;+\;a_{22}x_{2}\;+\cdots +\;a_{2n}x_{n}\;=0\\\vdots \;\;\;\vdots \;\;\;\vdots \;\;\;\vdots \,\\a_{m1}x_{1}\;+\;a_{m2}x_{2}\;+\cdots +\;a_{mn}x_{n}\;=0\end{alignedat}}\right\}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/6dc3f5e1de07583a5f71267bfe18983511ff466b)
Например, набор всех векторов (x, y, z) (над действительными или рациональными числами ), удовлетворяющих уравнениям

- одномерное подпространство. В более общем смысле, то есть, если задан набор из n независимых функций, размерность подпространства в K будет размером нулевого набора для A, составной матрицы из n функций.
Пустое пространство матрицы
В конечномерном пространстве однородная система линейных уравнений может быть записана как одно матричное уравнение:

Набор решений этого уравнения известен как пустое пространство матрицы. Например, описанное выше подпространство является пустым пространством матрицы
![A = \ left [{\ begin {alignat} {3} 1 3 2 \\ 2 \; \; - 4 \; \; \; \; 5 \ end {alignat}} \, \ right] {\ текст {.}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5958e6d2ff2fa03f244ba7efc2fe51137380d555)
Каждое подпространство K можно описать как нулевое пространство некоторой матрицы (подробнее см. § Алгоритмы ниже).
Линейные параметрические уравнения
Подмножество K, описываемое системой однородных линейных параметрических уравнений, является подпространством:
![\ left \ {\ left [\! \! {\ begin {array} {c} x_ {1} \\ x_ { 2} \\\ vdots \\ x_ {n} \ end {array}} \! \! \ Right] \ in K ^ {n}: {\ begin {alignat} {7} x_ {1} \; = \; a_ {11} t_ {1} \; + \; a_ {12} t_ {2} \; + \ cdots + \; a_ {1m} t_ {m} \\ x_ {2} \ ; = \; a_ {21} t_ {1} \; + \; a_ {22} t_ {2} \; + \ cdots + \; a_ {2m} t_ {m} \\\ vdots \, \ vdots \; \; \; \ vdots \; \; \; \ vdots \; \; \; \\ x_ {n} \; = \; a_ {n1} t_ {1} \ ; + \; a_ {n2} t_ {2} \; + \ cdots + \; a_ {nm} t_ {m} \\\ end {alignat}} {\ text {для некоторых}} t_ {1}, \ ldots, t_ {m} \ in K \ right \}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9807d14d2416787465ec0f27ca802935ef75176e)
Например, набор всех векторов (x, y, z), параметризованных уравнениями

является двумерным подпространством K, если K является числовым полем (таким как действительные или рациональные числа).
Диапазон векторов
В линейной алгебре систему параметрических уравнений можно записать как одно векторное уравнение:

Выражение справа называется линейной комбинацией векторов (2, 5, −1) и (3, −4, 2). Говорят, что эти два вектора охватывают результирующее подпространство.
В общем, линейная комбинация векторов v1, v2,..., vkпредставляет собой любой вектор формы

Набор всех возможных линейных комбинаций называется span :

Если векторы v1,..., vkимеют n компонентов, тогда их промежуток является подпространством K. Геометрически промежуток представляет собой плоскость, проходящую через начало координат в n-мерном пространстве, определяемом точками v1,..., vk.
- Пример
- Плоскость xz в R может быть параметризована уравнениями

- Как подпространство, плоскость xz натянута на векторы (1, 0, 0) и (0, 0, 1). Каждый вектор в плоскости xz может быть записан как линейная комбинация этих двух:

- Геометрически это соответствует тому факту, что каждая точка на плоскости xz может быть достигнута из начала координат, сначала переместившись на некоторое расстояние в направлении (1, 0, 0), а затем на некоторое расстояние в направлении (0, 0, 1).
Расстояние между столбцами и строками
Система линейных параметрических уравнений в конечномерном пространстве также может быть записана в виде единого матричного уравнения:
![\ mathbf {x} = A \ mathbf {t} \; \; \; \; {\ text {where}} \; \; \; \; A = \ left [{\ begin {alignat} {2} 2 3 \\ 5 \; \; - 4 \\ - 1 2 \ end {alignat}} \, \ right] {\ text {.}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4bcfc4ef22388fd2887a19ddda5005d12d244bb3)
В этом случае подпространство состоит из всех возможных значений вектор x . В линейной алгебре это подпространство известно как пространство столбцов (или изображение ) матрицы A. Это в точности подпространство K, натянутое на векторы-столбцы матрицы A.
Строка пространство матрицы - это подпространство, натянутое на ее векторы-строки. Строковое пространство интересно тем, что это ортогональное дополнение нулевого пространства (см. Ниже).
Независимость, базис и размерность

Векторы u и v являются основой для этого двумерного подпространства R.
В общем, подпространство K, определяемая k параметрами (или натянутая на k векторов), имеет размерность k. Однако из этого правила есть исключения. Например, подпространство K, натянутое на три вектора (1, 0, 0), (0, 0, 1) и (2, 0, 3), является просто плоскостью xz, причем каждая точка на описываемой плоскости бесконечно большим числом различных значений t 1, t 2, t 3.
В общем, векторы v1,..., vkназываются линейно независимыми если

для (t 1, t 2,..., t k) ≠ (u 1, u 2,..., и к). Если v1,..., vkлинейно независимы, то координаты t1,..., t k для вектора в диапазоне определяются однозначно.
A базис для подпространства S - это набор линейно независимых векторов, длина которых равна S. Число элементов в базисе всегда равно геометрической размерности подпространства. Любой покрывающий набор для подпространства можно превратить в базис, удалив избыточные векторы (подробнее см. § Алгоритмы ниже).
- Пример
- Пусть S будет подпространством R, определенным уравнениями

- Тогда векторы (2, 1, 0, 0) и (0, 0, 5, 1) являются базисом для S. В частности, каждый вектор, который удовлетворяет приведенным выше уравнениям, может быть записан однозначно как линейная комбинация двух базисных векторов :

- Подпространство S двумерно. Геометрически это плоскость в R, проходящая через точки (0, 0, 0, 0), (2, 1, 0, 0) и (0, 0, 5, 1).
Операции и отношения с подпространствами
Включение
Бинарное отношение теоретико-множественное включение определяет частичный порядок на множестве всех подпространств ( любого измерения).
Подпространство не может лежать ни в каком подпространстве меньшей размерности. Если dim U = k, конечное число и U ⊂ W, то dim W = k тогда и только тогда, когда U = W.
Пересечение

In R, пересечение два различных двумерных подпространства одномерны
Для заданных подпространств U и W векторного пространства V их пересечение U ∩ W: = {v ∈ V: v является элементом и U, и W} также является подпространством V.
Доказательство:
- Пусть v и w будут элементы U ∩ W. Тогда v и w принадлежат как U, так и W. Поскольку U является подпространством, то v+ wпринадлежит U. Аналогично, поскольку W является подпространством, то v+ wпринадлежит W. Таким образом, v+ wпринадлежит U ∩ W.
- Пусть v принадлежит U ∩ W, и пусть c - скаляр. Тогда v принадлежит как U, так и W. Поскольку U и W являются подпространствами, c v принадлежит как U, так и W.
- Поскольку U и W - векторные пространства, то 0 принадлежит обоим наборам. Таким образом, 0 принадлежит U ∩ W.
Для каждого векторного пространства V набор {0} и сам V являются подпространствами V.
Sum
Если U и W подпространства, их сумма будет подпространством

Например, сумма двух линий - это плоскость, которая содержит их обе. Размерность суммы удовлетворяет неравенству

Здесь минимум происходит, только если одно подпространство содержится в другом, а максимум - в самом общем случае. Размерность пересечения и сумма связаны следующим уравнением:

Решетка подпространств
Операции пересечение и сумма делают набор всех подпространств ограниченной модульной решеткой, где {0} подпространство, наименьший элемент, является элементом идентичности операции суммирования, а идентичное подпространство V, наибольший элемент, является элементом идентичности операции пересечения.
Ортогональные дополнения
Если V является внутренним пространством продукта и N является подмножеством V, тогда ортогональное дополнение N, обозначенное  , опять же подпространство. Если V конечномерно, а N - подпространство, то размеры N и удовлетворяют соотношению дополнения dim (N) + dim ( N) = dim (V). Более того, никакой вектор не ортогонален сам себе, поэтому
, опять же подпространство. Если V конечномерно, а N - подпространство, то размеры N и удовлетворяют соотношению дополнения dim (N) + dim ( N) = dim (V). Более того, никакой вектор не ортогонален сам себе, поэтому  и V - это прямая сумма из N и . Применение ортогональных дополнений дважды возвращает исходное подпространство:
и V - это прямая сумма из N и . Применение ортогональных дополнений дважды возвращает исходное подпространство:  для каждого подпространства N.
для каждого подпространства N.
Эта операция, понимаемая как отрицание (¬), превращает решетку подпространств в (возможно бесконечную ) решетку с ортодополнениями (хотя и не в дистрибутивную решетку).
В пространствах с другими билинейными формами некоторые, но не все из этих результатов остаются в силе. В псевдоевклидовых пространствах и симплектических векторных пространствах, например, существуют ортогональные дополнения. Однако эти пространства могут иметь нулевые векторы, которые ортогональны сами себе, и, следовательно, существуют такие подпространства N, что  . В результате эта операция не превращает решетку подпространств в булеву алгебру (или алгебру Гейтинга ).
. В результате эта операция не превращает решетку подпространств в булеву алгебру (или алгебру Гейтинга ).
Алгоритмы
Большинство алгоритмов для работы с подпространствами включают сокращение строк. Это процесс применения элементарных операций со строками к матрице, пока она не достигнет либо формы эшелона строк, либо уменьшенной формы эшелона строк. Уменьшение строки имеет следующее важные свойства:
- Уменьшенная матрица имеет то же пустое пространство, что и исходная.
- Сокращение строк не изменяет диапазон векторов-строк, т.е. уменьшенная матрица имеет то же пространство строк, что и исходная.
- Сокращение строк не влияет на линейную зависимость векторов-столбцов.
Основа для пространства строк
- Вход Матрица A m × n
- Выход Основа для пространство строк A.
- Используйте элементарные операции со строками, чтобы поместить A в форму эшелона строк.
- Ненулевые строки формы эшелона являются основой для пространства строк A.
См. Статью o n пространство строк для примера .
Если вместо этого мы приведем матрицу A в уменьшенную форму эшелона строк, то итоговая основа для пространства строк будет однозначно определена. Это обеспечивает алгоритм проверки того, равны ли два пространства строк и, соответственно, равны ли два подпространства в K.
Принадлежность к подпространству
- Вход Базис {b1, b2,..., bk} для подпространства S из K и вектор v с n компонентами.
- Вывод Определяет, является ли v элементом S
- Создайте матрицу A (k + 1) × n, строки которой являются векторами b1,..., bkи v.
- Используйте операции элементарной строки, чтобы поместить A в форму эшелона строки.
- Если форма эшелона имеет строку нулей, то векторы {b1,..., bk, v} линейно зависимы, поэтому v ∈ S.
Основа для пространства столбцов
- Вход Матрица m × n A
- Выход Основа для пространство столбцов A
- Используйте элементарные операции со строками, чтобы поместить A в форму эшелона строк.
- Определите, какие столбцы формы эшелона имеют точки поворота. Соответствующие столбцы исходной матрицы являются основой для пространства столбцов.
См. Статью о пространстве столбцов для примера.
Это создает основу для пространства столбцов, которая является подмножеством исходных векторов столбцов. Это работает, потому что столбцы со сводными точками являются основой для пространства столбцов формы эшелона, а сокращение строк не меняет отношения линейной зависимости между столбцами.
Координаты вектора
- Входные данные Базис {b1, b2,..., bk} для подпространства S в K и вектор v ∈ S
- Вывод Числа t 1, t 2,..., t k такие, что v = t 1b1+ ··· + t kbk
- Создать расширенную матрицу A, столбцы которой равны b1,..., bk, причем последний столбец будет v.
- Использовать элементарные операции со строками для преобразования A в сокращенную форму эшелона строк.
- Выразите последний столбец формы сокращенного эшелона как линейную комбинацию первых k столбцов. Используемые коэффициенты представляют собой желаемые числа t 1, t 2,..., t k. (Это должны быть в точности первые k записей в последнем столбце формы сокращенного эшелона.)
Если последний столбец формы сокращенного эшелона строк содержит точку поворота, то входной вектор v не содержит лежат в S.
Основа для пустого пространства
- Вход Матрица A m × n
- Выход Основа для нулевого пространства A
- Используйте элементарные операции со строками, чтобы преобразовать A в сокращенную форму эшелона строк.
- Используя форму сокращенного эшелона строк, определите, какая из переменных x 1, x 2,..., x n свободны. Напишите уравнения для зависимых переменных в терминах свободных переменных.
- Для каждой свободной переменной x i выберите вектор в пустом пространстве, для которого x i = 1, а остальные свободные переменные равны нулю. Полученный набор векторов является основой для нулевого пространства A.
См. Статью о нулевом пространстве для примера.
Основа для суммы и пересечения двух подпространств
Данных двух подпространства U и W в V, основание суммы  и пересечения
и пересечения  можно вычислить с помощью алгоритма Цассенхауза
можно вычислить с помощью алгоритма Цассенхауза
Уравнения для подпространства
- Вход Базис {b1, b2,..., bk} для подпространства S из K
- Выходные данные Матрица (n - k) × n, пустое пространство которой равно S.
- Создайте матрицу A со строками b1, b2,..., bk.
- Используйте элементарные операции со строками для поместите A в сокращенную форму эшелона строк.
- Пусть c1, c2,..., cnбудут столбцами сокращенной формы эшелона строк. Для каждого столбца без поворота напишите уравнение, выражающее столбец как линейную комбинацию столбцов с поворотными точками.
- В результате получается однородная система из n - k линейных уравнений с переменными c1,..., cn. Матрица (n - k) × n, соответствующая этой системе, является искомой матрицей с нулевым пространством S.
- Пример
- Если сокращенная форма эшелона строки A равна
![\ left [{\ begin {alignat} {6} 1 0 - 3 0 2 0 \\ 0 1 5 0 - 1 4 \\ 0 0 0 1 7 - 9 \\ 0 \; \; \; \; \; 0 \; \; \; \; \; 0 \; \; \; \; \; 0 \; \ ; \; \; \; 0 \; \; \; \; \; 0 \ end {alignat}} \, \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/750dec11df599c8b8d1c8953c8838a30ffc713aa)
- тогда векторы-столбцы c1,..., c6удовлетворяют уравнениям

- Отсюда следует, что векторы-строки A удовлетворяют уравнениям

- В частности, векторы-строки матрицы A являются основой для нулевого пространства соответствующей матрицы.
См. Также
Примечания
Учебники
- Антон, Ховард (2005), Элементарная линейная алгебра (прикладная версия) (9-е изд.), Wiley International
- Axler, Sheldon Jay (2015), Linear Algebra Done Done Right (3-е изд.), Springer-Verlag, ISBN 978-3-319-11079-0
- Beauregard, Raymond A.; Фрали, Джон Б. (1973), Первый курс линейной алгебры: с дополнительным введением в группы, кольца и поля, Бостон: Houghton Mifflin Company, ISBN 0-395-14017-X
- Herstein, IN (1964), Topics In Algebra, Waltham:, ISBN 978-1114541016
- Kreyszig, Erwin (1972), Advanced Engineering Mathematics (3-е изд.), Нью-Йорк: Wiley, ISBN 0-471-50728-8
- Лэй, Дэвид С. (22 августа 2005 г.), Линейная алгебра и ее приложения (3-е изд.), Эддисон Уэсли, ISBN 978-0-321-28713-7
- Леон, Стивен Дж. (2006), Линейная алгебра с приложениями (7-е изд.), Пирсон Прентис Холл
- Мейер, Карл Д. (15 февраля 2001 г.), Матричный анализ и прикладная линейная алгебра, Общество для промышленной и прикладной математики (SIAM), ISBN 978-0-89871-454-8, заархивировано с оригинала 1 марта 2001 г.
- Неринг, Эвар Д. (1970), Линейная алгебра и теория матриц (2-е изд.), Нью-Йорк: Wil ey, LCCN 76091646
- Пул, Дэвид (2006), Linear Algebra: A Modern Introduction (2nd ed.), Brooks / Cole, ISBN 0-534-99845-3
Внешние ссылки


 Проиллюстрированный пример II
Проиллюстрированный пример II  Векторы u и v являются основой для этого двумерного подпространства R.
Векторы u и v являются основой для этого двумерного подпространства R. In R, пересечение два различных двумерных подпространства одномерны
In R, пересечение два различных двумерных подпространства одномерны