
Войти
 Сфера, вращающаяся вокруг оси
Сфера, вращающаяся вокруг оси A вращение - это круговое движение объект вокруг центра (или точки) вращения. Трехмерный объект всегда можно вращать вокруг бесконечного числа воображаемых линий, называемых осями вращения (). Если ось проходит через центр масс тела, говорят, что тело вращается вокруг себя или вращается. Вращение вокруг внешней точки, например планета Земля вокруг Солнца называется оборотом или орбитальным оборотом, обычно когда это происходит под действием гравитации. Ось называется полюсом .
 Вращение плоской фигуры вокруг точки
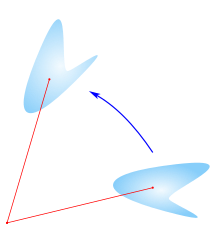
Вращение плоской фигуры вокруг точки  Орбита вращения v Вращение
Орбита вращения v Вращение 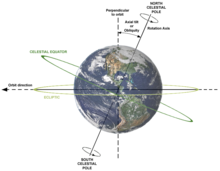 Отношения между ось вращения, плоскость орбиты и наклон оси (для Земли).
Отношения между ось вращения, плоскость орбиты и наклон оси (для Земли). Математически вращение - это движение твердого тела, которое, в отличие от перевод, фиксирует точку. Это определение применяется к поворотам как в двух, так и в трех измерениях (в плоскости и в пространстве, соответственно).
Все движения твердого тела - это вращения, перемещения или их комбинации.
Вращение - это просто прогрессивная радиальная ориентация к общей точке. Эта общая точка находится внутри оси этого движения. Ось расположена на 90 градусов перпендикулярно плоскости движения. Если ось вращения лежит вне рассматриваемого тела, то говорят, что тело вращается по орбите. Нет принципиальной разницы между «вращением» и «орбитой» или «вращением». Ключевое различие заключается в том, где находится ось вращения, внутри или снаружи рассматриваемого тела. Это различие может быть продемонстрировано как для «твердых», так и для «нежестких» тел.
Если вращение вокруг точки или оси сопровождается вторым вращением вокруг той же точки / оси, получается третье вращение. Обратное (инверсное ) поворота также является поворотом. Таким образом, вращения вокруг точки / оси образуют группу . Однако вращение вокруг точки или оси и вращение вокруг другой точки / оси может привести к чему-то другому, кроме вращения, например перевод.
Повороты вокруг осей x, y и z называются основными вращениями. Вращение вокруг любой оси может быть выполнено путем вращения вокруг оси x с последующим вращением вокруг оси y и последующим вращением вокруг оси z. Иными словами, любое пространственное вращение можно разложить на комбинацию основных вращений.
В динамике полета основные вращения известны как рыскание, тангаж и крен (известные как углы Тейта – Брайана ). Эта терминология также используется в компьютерной графике.
 звездных следах, вызванных вращением Земли во время длительной выдержки камеры .
звездных следах, вызванных вращением Земли во время длительной выдержки камеры . В астрономии вращение - обычное явление. Звезды, планеты и подобные тела вращаются вокруг своих осей. Скорость вращения планет Солнечной системы была впервые измерена путем отслеживания визуальных характеристик. Вращение звезды измеряется посредством доплеровского сдвига или путем отслеживания активных элементов поверхности.
Это вращение вызывает центробежное ускорение в системе отсчета Земли, которое немного противодействует влиянию силы тяжести, чем ближе к экватору. Один из эффектов заключается в том, что объект весит немного меньше на экваторе. Другая причина заключается в том, что Земля слегка деформирована в сплюснутый сфероид.
. Другим следствием вращения планеты является явление прецессии. Как и в гироскопе , общий эффект представляет собой небольшое «колебание» в движении оси планеты. В настоящее время наклон оси Земли к плоскости его орбиты (наклон эклиптики ) составляет 23,44 градуса, но этот угол изменяется медленно (в течение тысяч лет). (См. Также Прецессия равноденствий и Полярная звезда.)
Хотя вращение часто используется как синоним вращения, Во многих областях, особенно в астрономии и связанных областях, вращение, которое для ясности часто называют орбитальным вращением, используется, когда одно тело движется вокруг другого, в то время как вращение используется для обозначения движения вокруг оси. Луны вращаются вокруг своей планеты, планеты вращаются вокруг своей звезды (например, Земля вокруг Солнца); и звезды медленно вращаются вокруг своего центра галактики. Движение компонентов галактики сложное, но обычно включает в себя компонент вращения.
Большинство планет в нашей солнечной системе, включая Землю, вращаются в том же направлении, что и их орбита Солнце. Исключение составляют Венера и Уран. Уран вращается почти на бок относительно своей орбиты. Текущее предположение состоит в том, что Уран начинал с типичной прямой ориентации и был сбит на бок в результате сильного удара в начале своей истории. Можно представить себе Венеру как медленно вращающуюся назад (или «перевернутую»). карликовая планета Плутон (ранее считавшаяся планетой) аномальна в этом и других отношениях.
Скорость вращения задается угловой частотой (рад / с) или частотой (оборотов за раз) или период (секунды, дни и т. Д.). Скорость изменения угловой частоты - это угловое ускорение (рад / с²), вызванное крутящим моментом. Отношение этих двух величин (насколько тяжело начать, остановить или иным образом изменить вращение) задается моментом инерции.
вектором угловой скорости (осевым вектором ) также описывает направление оси вращения. Точно так же крутящий момент - это осевой вектор.
Физика вращения вокруг фиксированной оси математически описывается с помощью представления угла оси вращений. Согласно правилу правой руки, направление от наблюдателя связано с вращением по часовой стрелке, а направление к наблюдателю - с вращением против часовой стрелки, как винт .
законы физики в настоящее время считаются инвариантными при любом фиксированном вращении. (Хотя кажется, что они меняются, если смотреть с вращающейся точки зрения: см. вращающуюся систему отсчета.)
В современной физической космологии космологический принцип - это понятие что распределение материи во Вселенной однородно и изотропно при рассмотрении в достаточно большом масштабе, поскольку ожидается, что силы будут действовать равномерно по всей вселенной и не имеют предпочтительного направления, и Следовательно, не должно вызывать никаких наблюдаемых нарушений в крупномасштабной структуре в ходе эволюции поля материи, которая изначально была заложена в результате Большого взрыва.
В частности, для системы, которая ведет себя одинаково независимо от того, как она ориентирована в пространстве, ее лагранжиан инвариантен относительно вращения. Согласно теореме Нётер, если действие (интеграл по времени его лагранжиана) физической системы инвариантно относительно вращения, то угловой момент сохраняется.
 эйлеровы вращения Земли. Внутреннее (зеленый), Прецессионный (синий) и Нутационный (красный)
эйлеровы вращения Земли. Внутреннее (зеленый), Прецессионный (синий) и Нутационный (красный) вращения Эйлера обеспечивают альтернативное описание вращения. Это композиция из трех поворотов, определяемых как движение, полученное путем изменения одного из углов Эйлера , оставив два других постоянными. Вращения Эйлера никогда не выражаются в терминах внешней системы отсчета или в терминах совместно движущейся системы координат вращающегося тела, а в виде смеси. Они составляют систему смешанных осей вращения, где первый угол перемещает линию узлов вокруг внешней оси z, второй вращается вокруг линии узлов, а третий - собственное вращение вокруг оси, закрепленной в движущемся теле.
Эти вращения называются прецессией, нутацией и собственным вращением.
 Основные оси вращения в пространстве
Основные оси вращения в пространстве В динамике полета основные вращения, описанные с помощью углов Эйлера выше, известны как тангаж, крен и рыскание. Термин вращение также используется в авиации для обозначения восходящего тангажа (нос движется вверх) самолета, особенно при начале набора высоты после взлета.
Основные вращения имеют преимущество моделирования ряда физических систем, таких как подвесы и джойстики, поэтому их легко визуализировать, и они представляют собой очень компактный способ хранения вращение. Но их сложно использовать в расчетах, поскольку даже простые операции, такие как объединение поворотов, являются дорогостоящими и страдают от формы карданного замка, когда углы не могут быть однозначно рассчитаны для определенных вращений.
Многие аттракционы обеспечивают вращение. Колесо обозрения имеет горизонтальную центральную ось и параллельные оси для каждой гондолы, где вращение противоположно, под действием силы тяжести или механически. В результате в любой момент гондола имеет вертикальную ориентацию (не поворачивается), просто переводится. Кончик вектора перемещения описывает круг. карусель обеспечивает вращение вокруг вертикальной оси. Многие аттракционы предусматривают комбинацию вращений вокруг нескольких осей. В Chair-O-Planes вращение вокруг вертикальной оси обеспечивается механически, а вращение вокруг горизонтальной оси происходит за счет центростремительной силы. В переворачивании американских горок вращение вокруг горизонтальной оси составляет один или несколько полных циклов, когда инерция удерживает людей на своих местах.
Вращение мяча или другого объекта, обычно называемое вращением, играет важную роль во многих видах спорта, включая верхнее вращение и обратное вращение в теннис, английский язык, следуй и играй в бильярд и пул, кривые шары в бейсбол, боулинг с вращением в крикет, летающий диск спорт и т. Д. ракетки для настольного тенниса изготавливаются с различными характеристиками поверхности, чтобы позволить игроку придавать мячу большее или меньшее вращение..
Вращение игрока один или несколько раз вокруг вертикальной оси может называться вращением в фигурном катании, вращением (дубинки или исполнителя) в вращении дубинки, или 360, 540, 720 и т. д. в сноубординге и т. д. Вращение игрока или исполнителя один или несколько раз вокруг горизонтальной оси может называться переворотом, перекат, сальто, вертолет и т. д. в гимнастике, водных лыжах или многих других видах спорта, или полуторный, два -полуторный, гейнер (начиная лицом от воды) и т. д. в нырянии и т. д. Комбинация вертикального и горизонтального вращения (сальто назад на 360 °) называется мёбиусом в водные лыжи прыжки вольным стилем.
Вращение игрока вокруг вертикальной оси, обычно между 180 и 360 градусами, может называться вращением и использоваться как обманный маневр или маневр уклонения, или в попытке сыграть, передать пас или получить мяч или шайбу и т. д., или дать игроку возможность видеть ворота или других игроков. Часто встречается в хоккее, баскетболе, футболе различных кодов, теннисе и т. Д.
Конечный результат любой последовательности вращений любого объекта в 3D вокруг фиксированной точки всегда эквивалентен вращению вокруг оси. Однако объект может физически вращаться в 3D вокруг фиксированной точки по нескольким осям одновременно, и в этом случае не существует единой фиксированной оси вращения - только фиксированная точка. Однако эти два описания можно согласовать - такое физическое движение всегда можно заново описать в терминах единственной оси вращения, при условии, что ориентация этой оси относительно объекта может изменяться от момента к моменту.
Двухмерные вращения, в отличие от трехмерных, не имеют оси вращения. Это эквивалентно для линейных преобразований, когда говорится, что нет направления в месте, которое не изменяется при двухмерном вращении, за исключением, конечно, тождества.
Вопрос о существовании такого направления - это вопрос о существовании собственного вектора для матрицы A, представляющей вращение. Каждое двумерное вращение вокруг начала координат на угол 

Стандартное определение собственного значения приводит к характеристическому уравнению
 ,
,, который имеет

в качестве собственных значений. Следовательно, не существует реального собственного значения всякий раз, когда 
Зная, что след является инвариантом, угол поворота 

Используя главный арккосинус, это формула дает угол поворота, удовлетворяющий 


Каждое правильное вращение 


Спектральный анализ не требуется для определения оси вращения. Если 



Это обсуждение относится к правильному вращению, и, следовательно, 


Так же, как каждое трехмерное вращение имеет ось вращения, также каждое трехмерное вращение имеет плоскость, которая перпендикулярна оси вращения и которая остается неизменной при вращении. Вращение, ограниченное этой плоскостью, является обычным двумерным вращением.
Доказательство проводится аналогично предыдущему обсуждению. Во-первых, предположим, что все собственные значения трехмерной матрицы вращения A действительны. Это означает, что существует ортогональный базис, состоящий из соответствующих собственных векторов (которые обязательно ортогональны), на который эффект матрицы вращения просто растягивает его. Если в этом базисе писать A, то он диагональный; но диагональная ортогональная матрица состоит только из + 1 и -1 в диагональных элементах. Следовательно, у нас есть не собственное вращение, а либо тождество, либо результат последовательности отражений.
Следовательно, собственное вращение имеет комплексное собственное значение. Пусть v - соответствующий собственный вектор. Тогда, как мы показали в предыдущем разделе, 



потому что, поскольку 



Это означает
Эта плоскость ортогональна инвариантной оси, которая соответствует оставшемуся собственному вектору A с собственным значением 1 из-за ортогональности собственных векторов A.
