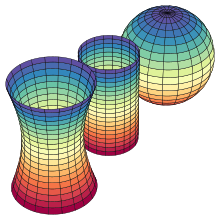
Слева направо: поверхность отрицательной
гауссовой кривизны (
гиперболоид ), поверхность нулевой гауссовой кривизны (
цилиндр ) и поверхность положительной гауссовой кривизны (
сфера ). В более высоких измерениях
коллектор может иметь разную кривизну в разных направлениях, что описывается
тензором кривизны Римана.
В математике, в частности дифференциальной геометрии, бесконечно малая геометрия римановых многообразий с размерностью больше 2 слишком сложна, чтобы описывать ее одним числом в данной точке. Риман представил абстрактный и строгий способ определения кривизны для этих многообразий, теперь известный как тензор кривизны Римана. Подобные понятия повсюду нашли применение в дифференциальной геометрии.
Для более элементарного обсуждения см. Статью о кривизне, в которой обсуждается кривизна кривых и поверхностей в двух и трех измерениях, а также дифференциальная геометрия поверхностей.
Кривизна псевдориманова многообразия может быть выражена таким же образом с небольшими изменениями.
Содержание
- 1 Способы выражения кривизны риманова многообразия
- 1.1 Тензор кривизны Римана
- 1.1.1 Симметрии и тождества
- 1.2 Секционная кривизна
- 1.3 Форма кривизны
- 1.4 Оператор кривизны
- 2 Дополнительные тензоры кривизны
- 2.1 Скалярная кривизна
- 2.2 Кривизна Риччи
- 2.3 Тензор кривизны Вейля
- 2.4 Разложение Риччи
- 3 Расчет кривизны
- 4 Ссылки
- 5 Примечания
Способы выражения кривизны риманова многообразия
Тензор кривизны Римана
Кривизна риманова многообразия может быть описана различными способами; наиболее стандартным является тензор кривизны, заданный в терминах связи Леви-Чивиты (или ковариантного дифференцирования )  и скобка Ли
и скобка Ли ![[\ cdot, \ cdot]](https://wikimedia.org/api/rest_v1/media/math/render/svg/28dd4c22d60192519c1c12cf645b040f368db9e9) по следующей формуле:
по следующей формуле:
![R (u, v) w = \ nabla _ {u} \ nabla _ {v} w- \ nabla _ {v} \ nabla _ {u} w- \ nabla _ {{[u, v]}} w.](https://wikimedia.org/api/rest_v1/media/math/render/svg/a521909ebf9b30c4cfb21369a3a25d3ed8dc5f7c)
Здесь  - линейное преобразование касательного пространства многообразия; он линейен по каждому аргументу. Если
- линейное преобразование касательного пространства многообразия; он линейен по каждому аргументу. Если  и
и  являются координатными векторными полями, тогда
являются координатными векторными полями, тогда ![[u, v] = 0](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b7002d017ea13b4965beaf5320f9d2d872b0579) и поэтому формула упрощается до
и поэтому формула упрощается до

т.е. тензор кривизны измеряет некоммутативность ковариантной производной.
Линейное преобразование  также называется преобразованием кривизны. или эндоморфизм .
также называется преобразованием кривизны. или эндоморфизм .
NB. Есть несколько книг, в которых тензор кривизны определяется с противоположным знаком.
Симметрии и тождества
Тензор кривизны имеет следующие симметрии:



Последняя идентичность была обнаружена Риччи, но его часто называют первой идентичностью Бьянки, просто потому, что она похожа на идентичность Бьянки ниже. Первые два должны рассматриваться как свойство антисимметрии и алгебры Ли соответственно, поскольку второе означает, что R (u, v) для всех u, v являются элементами псевдоортогональной алгебры Ли. Все три вместе следует назвать структурой псевдоортогональной кривизны. Они порождают тензор только путем отождествления с объектами тензорной алгебры - но точно так же существуют отождествления с понятиями в алгебре Клиффорда. Отметим, что эти три аксиомы структуры кривизны порождают хорошо разработанную структурную теорию, сформулированную в терминах проекторов (проектор Вейля, порождающий кривизну Вейля, и проектор Эйнштейна, необходимый для установки теории Эйнштейна гравитационного поля). уравнения). Эта структурная теория совместима с действием псевдоортогональных групп плюс растяжений. Он имеет тесные связи с теорией групп и алгебр Ли, троек Ли и йордановых алгебр. См. Ссылки, приведенные в обсуждении.
Эти три тождества образуют полный список симметрий тензора кривизны, т.е. для любого тензора, который удовлетворяет указанным выше тождествам, в какой-то точке можно было бы найти риманово многообразие с таким тензором кривизны. Простые вычисления показывают, что такой тензор имеет  независимых компонентов. Еще одно полезное тождество следует из этих трех:
независимых компонентов. Еще одно полезное тождество следует из этих трех:

Тождество Бьянки (часто второе тождество Бьянки ) включает ковариантную производные:

Секционная кривизна
Секционная кривизна - это еще одно эквивалентное, но более геометрическое описание кривизны римановых многообразий. Это функция  , которая зависит от раздела
, которая зависит от раздела  (т.е. 2-плоскость в касательных пространствах). Это кривизна Гаусса сечения в точке p; здесь -section - это локально определенный кусок поверхности, имеющий плоскость в качестве касательной. в p, полученный из геодезических, которые начинаются в p в направлениях изображения под экспоненциальной картой в p.
(т.е. 2-плоскость в касательных пространствах). Это кривизна Гаусса сечения в точке p; здесь -section - это локально определенный кусок поверхности, имеющий плоскость в качестве касательной. в p, полученный из геодезических, которые начинаются в p в направлениях изображения под экспоненциальной картой в p.
Если  - два линейно независимых вектора в , то
- два линейно независимых вектора в , то

Следующая формула показывает, что секционная кривизна полностью описывает тензор кривизны:

![[K (u + z, v + w) -K (u + z, v) -K (u + z, w) -K (u, v + w) -K (z, v + w) + K (u, w) + K (v, z)] -_ {{}} ^ {{}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5129f15813f4140122a5d40f3f980dbdbc2dde8e)
![[K (u + w, v + z) -K (u + w, v) -K (u + w, z) -K (u, v + z) -K (w, v + z) + K (v, w) + K (u, z)]._ {{}} ^ { {}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bc45dbb223208bd8de55f511a6a9abcaf3ae8208)
Или в более простой формуле:

Форма кривизны
Форма соединения дает альтернативный способ описания кривизны. Он больше используется для общих векторных пакетов и для основных связок, но он также хорошо работает для касательного пучка со связью Леви-Чивита. Кривизна n-мерного риманова многообразия задается антисимметричной n × n-матрицей  из 2-форм (или эквивалентно 2-формы со значениями в
из 2-форм (или эквивалентно 2-формы со значениями в  , алгебра Ли из ортогональной группы
, алгебра Ли из ортогональной группы  , которая является структурной группой касательного расслоения риманова многообразия).
, которая является структурной группой касательного расслоения риманова многообразия).
Пусть  будет локальным разделом ортонормированных баз. Затем можно определить форму связи, антисимметричную матрицу 1-форм
будет локальным разделом ортонормированных баз. Затем можно определить форму связи, антисимметричную матрицу 1-форм  , которые удовлетворяют из следующее тождество
, которые удовлетворяют из следующее тождество

Тогда форма кривизны  равна определяется как
равна определяется как
 .
.
Обратите внимание, что выражение « "- это сокращение от
"- это сокращение от  и, следовательно, не обязательно исчезает. Следующее описывает связь между формой кривизны и тензором кривизны:
и, следовательно, не обязательно исчезает. Следующее описывает связь между формой кривизны и тензором кривизны:

Этот подход строится на всех симметриях тензора кривизны, кроме первого тождества Бьянки, которое принимает форму

где  - n-вектор из 1 -формы, определенные как
- n-вектор из 1 -формы, определенные как  . Второе тождество Бьянки принимает форму
. Второе тождество Бьянки принимает форму

D обозначает внешнюю ковариантную производную
Оператор кривизны
Иногда удобно рассматривать кривизну как оператор  на касательной бивекторов (элементы
на касательной бивекторов (элементы  ), который однозначно определяется следующим тождеством:
), который однозначно определяется следующим тождеством:

Это возможно именно благодаря симметрии тензор кривизны (а именно антисимметрия в первой и последней парах индексов и блочная симметрия этих пар).
Другие тензоры кривизны
В общем, следующие тензоры и функции не описывают тензор кривизны полностью, однако они играют важную роль.
Скалярная кривизна
Скалярная кривизна - это функция на любом римановом многообразии, обычно обозначаемая Sc. Это полная трасса тензора кривизны; учитывая ортонормированный базис  в касательном пространстве в точке p, мы имеем
в касательном пространстве в точке p, мы имеем

где Ric означает тензор Риччи. Результат не зависит от выбора ортонормированного базиса. Начиная с размерности 3, скалярная кривизна не полностью описывает тензор кривизны.
Кривизна Риччи
Кривизна Риччи - это линейный оператор на касательном пространстве в точке, обычно обозначаемый Ric. Учитывая ортонормированный базис в касательном пространстве в точке p, мы имеем

Результат не зависит от выбора ортонормированного базиса. При четырех или более измерениях кривизна Риччи не полностью описывает тензор кривизны.
Явные выражения для тензора Риччи в терминах связи Леви-Чивита приведены в статье о символах Кристоффеля.
тензоре кривизны Вейля
Тензор кривизны Вейля имеет те же симметрии, что и тензор кривизны, плюс одна дополнительная: его след (используемый для определения кривизны Риччи) должен исчезнуть. В размерностях 2 и 3 кривизна Вейля равна нулю, но если размерность n>3, то вторая часть может быть ненулевой.
- Тензор кривизны можно разложить на часть, которая зависит от кривизны Риччи и тензора Вейля.
- Если g ′ = fg для некоторой положительной скалярной функции f - a конформный изменение метрики - тогда W '= W.
- Для многообразия постоянной кривизны тензор Вейля равен нулю.
- Более того, W = 0 тогда и только тогда, когда метрика локально конформна стандартной евклидовой метрике (равна fg, где g - стандартная метрика в некоторой системе координат, а f - некоторая
Разложение Риччи
Хотя по отдельности тензор Вейля и тензор Риччи в общем случае не определяют тензор полной кривизны, тензор кривизны Римана можно разложить на часть Вейля и часть Риччи. Это разложение известно как разложение Риччи и играет важную роль в конформной геометрии римановых многообразий. В частности, его можно использовать, чтобы показать, что если метрика масштабируется с помощью конформного коэффициента  , то тензор кривизны Римана изменяется на ( рассматривается как (0, 4) -тензор):
, то тензор кривизны Римана изменяется на ( рассматривается как (0, 4) -тензор):

где  обозначает произведение Кулькарни – Номидзу, а Гесс - Гессен.
обозначает произведение Кулькарни – Номидзу, а Гесс - Гессен.
Расчет кривизны
Для расчета кривизны
- гиперповерхностей и подмногообразий см. вторую фундаментальную форму,
- в координатах, см. список формул в римановой геометрии или ковариантная производная,
- путем перемещения кадров см. связь Картана и форма кривизны.
- уравнение Якоби может помочь, если кто-то знает что-то о поведении геодезических.
Литература
- Кобаяси, Шошичи; Номидзу, Кацуми (1996). Основы дифференциальной геометрии, Vol. 1 (Новое изд.). Wiley-Interscience. ISBN 0-471-15733-3.
Примечания
.

 Слева направо: поверхность отрицательной гауссовой кривизны (гиперболоид ), поверхность нулевой гауссовой кривизны (цилиндр ) и поверхность положительной гауссовой кривизны (сфера ). В более высоких измерениях коллектор может иметь разную кривизну в разных направлениях, что описывается тензором кривизны Римана.
Слева направо: поверхность отрицательной гауссовой кривизны (гиперболоид ), поверхность нулевой гауссовой кривизны (цилиндр ) и поверхность положительной гауссовой кривизны (сфера ). В более высоких измерениях коллектор может иметь разную кривизну в разных направлениях, что описывается тензором кривизны Римана.