
Войти
 Воспроизвести медиа Мигрирующий дикий тип Dictyostelium discoideum клетка, граница которой окрашена кривизной. Масштаб: 5 мкм.
Воспроизвести медиа Мигрирующий дикий тип Dictyostelium discoideum клетка, граница которой окрашена кривизной. Масштаб: 5 мкм. В математике, кривизна - это любое из нескольких тесно связанных понятий в геометрии. Интуитивно, кривизна - это величина, на которую кривая отклоняется от прямой линии или поверхность отклоняется от плоскости.
Для кривых каноническим примером является окружность , кривизна которой равна обратной величине ее радиуса. Меньшие круги изгибаются более резко и, следовательно, имеют большую кривизну. Кривизна в точке дифференцируемой кривой - это кривизна ее соприкасающейся окружности, то есть окружности, которая наилучшим образом аппроксимирует кривую вблизи этой точки. Кривизна прямой равна нулю. Кривизна кривой в точке обычно является скалярной величиной, то есть она выражается одним действительным числом.
для поверхностей (и, в более общем смысле, для многомерных многообразий ), которые вложены в евклидово пространство, концепция кривизны более сложна, так как зависит от выбора направления на поверхности или многообразии. Это приводит к понятиям максимальной кривизны, минимальной кривизны и средней кривизны.
Для римановых многообразий (размерности не менее двух), которые не обязательно вложены в евклидово пространство, можно определить кривизну внутренне, то есть без ссылки на внешнее пространство. См. Кривизна римановых многообразий для определения, которое делается в терминах длин кривых, начерченных на многообразии, и выражается с помощью линейной алгебры с помощью тензора кривизны Римана..
Кривизна дифференцируемой кривой была первоначально определена с помощью соприкасающихся окружностей. В этой настройке Огюстен-Луи Коши показал, что центр кривизны - это точка пересечения двух бесконечно близких нормальных линий к кривой.
Интуитивно кривизна описывает для любой части кривой, насколько направление кривой изменяется на небольшом пройденном расстоянии (например, угол в рад / м), поэтому это мера мгновенной скорости изменения направления точки, которая движется по кривой: чем больше кривизна, тем больше скорость изменения. Другими словами, кривизна измеряет, насколько быстро вращается единичный касательный вектор к кривой (быстро с точки зрения положения кривой). Фактически, можно доказать, что эта мгновенная скорость изменения и есть кривизна. Точнее, предположим, что точка движется по кривой с постоянной скоростью в одну единицу, то есть положение точки P (s) является функцией параметра s, который можно рассматривать как время или как длина дуги от заданной исходной точки. Пусть T (s) будет единичным касательным вектором кривой в точке P (s), который также является производной P (s) по отношению к с. Тогда производная T (s) по s представляет собой вектор, нормальный к кривой, и длина которого является кривизной.
Для того, чтобы иметь смысл, определение кривизны и ее различные характеристики требуют, чтобы кривая была непрерывно дифференцируемой рядом с P, так как тангенс имеет непрерывно изменяющуюся касательную; также требуется, чтобы кривая была дважды дифференцируемой в точке P, чтобы гарантировать существование задействованных пределов и производной от T (s).
Описание кривизны в терминах производной единичного касательного вектора, вероятно, менее интуитивно понятно, чем определение в терминах соприкасающейся окружности, но формулы для вычисления кривизны легче вывести. Поэтому, а также из-за его использования в кинематике, эта характеристика часто приводится как определение кривизны.
Изменение направления ходьбы (тангенциальное направление θ) на разных кривых:
Прямая, без изменения направления:
Окружность дуга угла Δθ по длине L (например, 90 градусов по длине 4 см), постоянное изменение направления на Δθ:
Круг с радиусом R (например, 2,5 см), постоянное изменение направления на Δθ = 360 градусов (= 2π рад):
Эллипс, непостоянное изменение направления:
Угол многоугольника с внутренним углом (π - Δθ) (например, 90 градусов), изменение направления на Δθ, но только в одной точке (длина L ->0):
Для небольших изменений направления Δθ соответствующий блок касательный вектор Tизменяется примерно на Δθ (в радиан ) ортогонально T.
Таким образом, для единицы касательный вектор T(s), при в каждой точке скорость изменения d T / dL ортогональна T (s) и имеет указанные значения кривизны как величина.
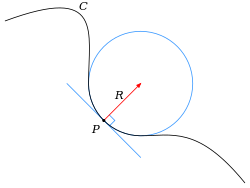
Исторически кривизна дифференцируемой кривой была определена через соприкасающуюся окружность, которая является окружностью, которая наилучшим образом приближает кривую в точке. Точнее, если задана точка P на кривой, каждая другая точка Q кривой определяет окружность (или иногда прямую), проходящую через Q и касательную к кривой в точке P. Прилегающая окружность - это предел, если он существует, этой окружности, когда Q стремится к P. Тогда центр и радиус кривизны кривой в точке P являются центром и радиусом соприкасающейся окружности. Кривизна - это , обратная радиусу кривизны. То есть кривизна равна

, где R - радиус кривизны (кривизна имеет всю окружность, его можно прочитать как поворот 2π на длине 2πR).
Этим определением сложно манипулировать и выражать его в формулах. Поэтому были введены другие эквивалентные определения.
Каждая дифференцируемая кривая может быть параметризована относительно длины дуги. В случае плоской кривой это означает существование параметризации γ (s) = (x (s), y (s)), где x и y - действительные дифференцируемые функции, производные которых удовлетворяют

Это означает, что касательный вектор

имеет норму, равную единице, и поэтому единичный касательный вектор.
Если кривая дважды дифференцируема, то есть если существуют вторые производные от x и y, то существует производная от T (s). Этот вектор нормален к кривой, его нормой является кривизна κ (s), и он ориентирован к центру кривизны. То есть

Более того, поскольку радиус кривизны равен

и центр кривизны находится по нормали к кривой, центр кривизны - точка

Если N (s) - это единичный вектор нормали, полученный из T (s) вращением против часовой стрелки на π / 2, то

с k (s) = ± κ (s). Действительное число k (s) называется ориентированной или кривизной со знаком . Это зависит как от ориентации плоскости (определение против часовой стрелки), так и от ориентации кривой, обеспечиваемой параметризацией. Фактически, изменение переменной s → –s обеспечивает другую параметризацию длины дуги и меняет знак k (s).
Пусть γ (t) = (x (t), y (t)) будет правильным параметрическим представлением дважды дифференцируемой плоской кривой. Здесь собственно означает, что в области определения параметризации производная d γ / dt определена, дифференцируема и нигде не равна нулевому вектору.
При такой параметризации кривизна со знаком составляет

где простые числа относятся к производным по t. Таким образом, кривизна κ равна

Их можно выразить безкоординатным способом как

Эти формулы могут быть получены из частного случая параметризации длины дуги следующим образом. Вышеупомянутое условие параметризации подразумевает, что длина s дуги является дифференцируемой монотонной функцией параметра t, и наоборот, что t является монотонной функцией s. Более того, изменяя, если необходимо, s на –s, можно предположить, что эти функции возрастают и имеют положительную производную. Используя обозначения из предыдущего раздела и правило цепочки , получаем

и, таким образом, взяв норму обеих сторон

где штрих означает вывод по t.
Кривизна - это норма производной T по s. Используя приведенную выше формулу и правило цепочки, эта производная и ее норма могут быть выражены только в терминах γ ′ и γ ″, при этом параметр длины дуги s полностью исключен, давая приведенные выше формулы для кривизны.
График функции y = f (x) - это частный случай параметризованной кривой вида

Поскольку первая и вторая производные от x равны 1 и 0, предыдущие формулы упрощаются до

для кривизны и

для кривизны со знаком.
В общем случае кривой знак кривизны со знаком как-то произвольно, в зависимости от ориентации кривой. В случае графика функции существует естественная ориентация за счет увеличения значений x. Это делает значимым признак подписанной кривизны.
Знак кривизны со знаком такой же, как знак второй производной f. Если он положительный, то график имеет вогнутость вверх, а если он отрицательный, график имеет вогнутость вниз. Он равен нулю, тогда имеется точка перегиба или точка перегиба .
. Когда наклон графика (то есть производная от функции) мал, кривизна со знаком хорошо аппроксимируется второй производной. Точнее, используя нотацию большого O, получаем

Это распространено в физике и инженерии для аппроксимации кривизны второй производной, например, в теории пучка или для вывода волнового уравнения натянутой струны, а также в других приложениях, где задействованы небольшие уклоны. Это позволяет часто рассматривать как линейные системы, которые в противном случае являются нелинейными.
Если кривая определяется в полярных координатах радиусом, выраженным как функция полярного угла, то есть r является функцией θ, тогда его кривизна

где штрих означает дифференцирование по θ.
Это получается из формулы для общих параметризаций с учетом параметризации

Для кривой, определяемой неявное уравнение F (x, y) = 0 с частными производными, обозначенными F x, F y, F xx, F xy, F yy, кривизна определяется как

Кривизна со знаком не определен, поскольку он зависит от ориентации кривой, которая не обеспечивается неявным уравнением. Кроме того, изменение F на –F не изменяет кривую, но меняет знак числителя, если абсолютное значение опущено в предыдущей формуле.
Точка кривой, где F x = F y = 0, является особой точкой, что означает, что кривая не дифференцируема. в этой точке, и, таким образом, кривизна не определена (чаще всего точка является либо точкой пересечения, либо выступом ).
Вышеупомянутая формула для кривизны может быть получена из выражения кривизны графика функции с помощью теоремы о неявной функции и того факта, что на такой кривой есть

Может быть полезно проверить на простые примеры того, что различные формулы, приведенные в предыдущих разделах, дают одинаковый результат.
Общая параметризация окружности радиуса r: γ (t) = (r cos t, r sin t). Формула кривизны дает

Как и ожидалось, следует, что радиус кривизны - это радиус окружности, а центр кривизны - это центр окружности.
Круг - это редкий случай, когда параметризацию длины дуги легко вычислить, так как это

Это параметризация длины дуги, поскольку норма

равно единице. Эта параметризация дает одно и то же значение кривизны, так как она представляет собой деление на r как в числителе, так и в знаменателе в предыдущей формуле.
Тот же круг можно определить неявным уравнением F (x, y) = 0 с F (x, y) = x + y - r. Тогда формула для кривизны в этом случае дает

Рассмотрим параболу y = ax + bx + c.
Это график функции с производной 2ax + b и второй производной 2a. Итак, кривизна со знаком равна

Он имеет знак a для всех значений x. Это означает, что при a>0 вогнутость всюду направлена вверх; if a < 0, the concavity is downward directed; for a = 0, the curvature is zero everywhere, confirming that the parabola degenerates into a line in this case.
(беззнаковая) кривизна максимальна для x = –b / 2a, то есть в стационарной точке (нулевая производная) функции, которая является вершиной параболы.
Рассмотрим параметризацию γ (t) = (t, at + bt + c) = (x, y). Первая производная x равна 1, а вторая производная равна нулю. Подстановка в формулу для общей параметризации дает точно такой же результат, как и выше, с заменой x на t. Если использовать простые числа для производных по параметру t.
Та же парабола также может быть определена неявным уравнением F (x, y) = 0 с F (x, y) = ax + bx + c - y. Поскольку F y = –1 и F yy = F xy = 0, можно получить точно такое же значение для (беззнаковой) кривизны. Однако кривизна со знаком здесь не имеет смысла, поскольку –F (x, y) = 0 является действительным неявным уравнением для той же параболы, которая дает противоположный знак для кривизны.
 Векторы T и N в двух точках на плоской кривой, переведенная версия второго кадра (пунктирная), и изменение T : δ T . δs - расстояние между точками. В пределе d T / ds будет в направлении N, а кривизна описывает скорость вращения кадра.
Векторы T и N в двух точках на плоской кривой, переведенная версия второго кадра (пунктирная), и изменение T : δ T . δs - расстояние между точками. В пределе d T / ds будет в направлении N, а кривизна описывает скорость вращения кадра. Выражение кривизны в терминах параметризации длины дуги по сути является первой формулой Френе – Серре

где штрихи относятся к производным по длине дуги s, а N (s) - нормальный единичный вектор в направление T ′ (с).
Поскольку плоские кривые имеют нулевое кручение, вторая формула Френе – Серре обеспечивает соотношение

Для общей параметризации параметром t требуются выражения, включающие производные по t. Поскольку они получаются путем умножения на ds / dt производных по s, для любой надлежащей параметризации имеем

 Анимация кривизны и вектора ускорения T ′ (s)
Анимация кривизны и вектора ускорения T ′ (s) Как и в случае кривых в двух измерениях, кривизна регулярной пространственной кривой C в трех измерениях (и выше) является величиной ускорения частицы, движущейся с единичной скоростью по кривой. Таким образом, если γ (s) является параметризацией C длиной дуги, то единичный касательный вектор T (s) задается как

, а кривизна - это величина ускорения:

Направление ускорения - единичный вектор нормали N (s), который определяется как

Самолет, содержащий два вектора T (s) и N (s) представляют собой соприкасающуюся плоскость кривой в γ (s). Кривизна имеет следующую геометрическую интерпретацию. В соприкасающейся плоскости существует окружность, касательная к γ (s), чей ряд Тейлора до второго порядка в точке контакта совпадает с рядом γ (s). Это соприкасающийся круг кривой. Радиус окружности R (s) называется радиусом кривизны, а кривизна является обратной величиной радиуса кривизны:

Касательная, кривизна и вектор нормали вместе описывают поведение кривой второго порядка вблизи точки. В трехмерном пространстве поведение кривой третьего порядка описывается связанным понятием кручение, которое измеряет степень, в которой кривая стремится перемещаться по спиральной траектории в пространстве. Кручение и кривизна связаны между собой формулами Френе – Серре (в трех измерениях) и их обобщением (в более высоких измерениях).
Для параметрически определенной пространственной кривой в трех измерениях, заданных в декартовых координатах как γ (t) = (x (t), y (t), z (t)) кривизна равна

где штрих означает дифференцирование по параметру t. Это можно выразить независимо от системы координат с помощью формулы

где × обозначает векторный крест продукт. Эквивалентно

Здесь T обозначает матрицу транспонировать. Эта последняя формула (без перекрестного произведения) также верна для кривизны кривых в евклидовом пространстве любой размерности.
Даны две точки P и Q на C, пусть s (P, Q) будет длиной дуги части кривой между P и Q, и пусть d (P, Q) обозначают длину отрезка от P до Q. Кривизна C в точке P определяется пределом

где предел берется, когда точка Q приближается к P на C. можно принять за d (P, Q). Формула действительна в любом измерении. Более того, если рассматривать предел независимо по обе стороны от P, это определение кривизны может иногда учитывать особенность в P. Формула следует, проверяя ее для соприкасающейся окружности.
Кривизна кривых, нарисованных на поверхности, является основным инструментом для определения и изучения кривизны поверхности.
Для кривой, нарисованной на поверхности (встроенной в трехмерное евклидово пространство ), определены несколько кривизны, которая связывает направление кривизны с единица поверхности вектор нормали, включая:
Любая неособая кривая на гладкой поверхности имеет касательный вектор T содержится в касательной плоскости поверхности. Нормальная кривизна, k n, это кривизна кривой, спроецированной на плоскость, содержащую касательную T кривой и нормаль к поверхности u <196.>; геодезическая кривизна, k g, является кривизной кривой, спроецированной на касательную плоскость поверхности; и геодезическое кручение (или относительное кручение ), τ r, измеряет скорость изменения нормали к поверхности вокруг касательной к кривой.
Пусть кривая будет параметризована длиной дуги, и пусть t= u× Tтак, чтобы T, t, uсформировал ортонормированный базис, называемый Рамка Дарбу. Вышеуказанные величины связаны соотношением:

 Седловая поверхность с нормальными плоскостями в направлениях главных кривизны
Седловая поверхность с нормальными плоскостями в направлениях главных кривизны Все кривые на поверхности с одинаковым касательным вектором в данной точке будут иметь одинаковую нормальную кривизну, которая совпадает с кривизной кривая, полученная путем пересечения поверхности с плоскостью, содержащей T и u . Взяв все возможные касательные векторы, максимальное и минимальное значения нормальной кривизны в точке называются главными кривизнами, k 1 и k 2, а направления соответствующих касательных векторов называются направлениями главных нормалей .
Кривизна может быть оценена вдоль поверхности нормальных сечений, аналогично § Кривые на поверхностях выше (см., Например, радиус кривизны Земли ).
В отличие от кривых, которые не имеют собственной кривизны, но имеют внешнюю кривизну (у них есть только кривизна с учетом вложения), поверхности могут иметь внутреннюю кривизну, независимо от вложения. Гауссова кривизна, названная в честь Карла Фридриха Гаусса, равна произведению главных кривизны k 1k2. Он имеет размерность длины и положительный для сфер, отрицательный для одностраничных гиперболоидов и ноль для плоскостей. Он определяет, является ли поверхность локально выпуклой (когда она положительная) или локально седловидной (когда отрицательная).
Гауссова кривизна является внутренним свойством поверхности, то есть она не зависит от конкретного вложения поверхности; интуитивно это означает, что муравьи, живущие на поверхности, могут определять гауссову кривизну. Например, муравей, живущий на сфере, может измерить сумму внутренних углов треугольника и определить, что он больше 180 градусов, подразумевая, что пространство, в котором он обитает, имеет положительную кривизну. С другой стороны, муравей, живущий на цилиндре, не обнаружит такого отклонения от евклидовой геометрии ; в частности, муравей не смог обнаружить, что две поверхности имеют разную среднюю кривизну (см. ниже), что является чисто внешним типом кривизны.
Формально гауссова кривизна зависит только от римановой метрики поверхности. Это знаменитая Теорема Эгрегия Гаусса, которую он обнаружил, занимаясь географическими изысканиями и картографированием.
Внутреннее определение гауссовой кривизны в точке P следующее: представьте муравья, который привязан к P короткой нитью длиной r. Он проходит вокруг P, пока нить полностью растянута, и измеряет длину C (r) одного полного обхода P. Если бы поверхность была плоской, муравей нашел бы C (r) = 2πr. На криволинейных поверхностях формула для C (r) будет другой, и гауссова кривизна K в точке P может быть вычислена по теореме Бертрана – Диге – Пюизо как

интеграл гауссовой кривизны по всей поверхности тесно связан с эйлеровой характеристикой поверхности; см. теорему Гаусса – Бонне.
Дискретный аналог кривизны, соответствующий сосредоточению кривизны в точке и особенно полезный для многогранников, - это (угловой) дефект ; аналогом теоремы Гаусса – Бонне является теорема Декарта о полном угловом дефекте.
Поскольку (гауссова) кривизна может быть определена без ссылки на пространство вложения, не обязательно, чтобы поверхность быть вложенным в многомерное пространство, чтобы быть искривленным. Такая внутренне искривленная двумерная поверхность является простым примером риманова многообразия.
Средняя кривизна - это внешняя мера кривизны, равная половине суммы главного кривизны, k 1 + k 2 / 2. Он имеет размерность длины. Средняя кривизна тесно связана с первым вариантом площади поверхности. В частности, минимальная поверхность, такая как мыльная пленка, имеет нулевую среднюю кривизну, а мыльный пузырь имеет постоянную среднюю кривизну. В отличие от кривизны Гаусса, средняя кривизна является внешней и зависит от вложения, например, цилиндр и плоскость локально изометричны, но средняя кривизна плоскости равна нулю, в то время как кривизна цилиндр отличен от нуля.
Внутренняя и внешняя кривизна поверхности может быть объединена во второй фундаментальной форме. Это квадратичная форма в касательной плоскости к поверхности в точке, значение которой в конкретном касательном векторе X к поверхности является нормальной составляющей ускорения кривой вдоль касательная к поверхности X ; то есть, это нормальная кривизна кривой, касательной к X (см. выше). Символически

где N - это единица измерения, нормальная к поверхности. Для единичных касательных векторов X вторая основная форма принимает максимальное значение k 1 и минимальное значение k 2, которые встречаются в главных направлениях u1и u2соответственно. Таким образом, согласно теореме о главной оси, вторая фундаментальная форма имеет вид

Таким образом, вторая фундаментальная форма кодирует как внутреннюю и внешние искривления.
Инкапсуляцию кривизны поверхности можно найти в операторе формы S, который является самосопряженным линейным оператором из касательная плоскость к самой себе (в частности, дифференциал карты Гаусса ).
Для поверхности с касательными векторами X и нормалью N оператор формы может быть компактно выражен в нотации суммирования индексов как

(Сравните альтернативное выражение кривизны плоскости кривой.)
Уравнения Вейнгартена дают значение S в терминах коэффициентов первой и второй фундаментальной формы как

Главные кривизны - это собственные значения оператора формы, главные направления кривизны - это его собственные векторы, кривизна Гаусса - это его определитель, а средняя кривизна составляет половину его следа.
Расширяя предыдущий аргумент, пространство трех или более измерений может быть искривлено по своей природе. Кривизна является внутренней в том смысле, что это свойство, определенное в каждой точке пространства, а не свойство, определенное по отношению к большему пространству, которое его содержит. В общем, искривленное пространство может или не может рассматриваться как встроенное в многомерное окружающее пространство ; в противном случае его кривизну можно определить только внутренне.
После открытия внутреннего определения кривизны, которое тесно связано с неевклидовой геометрией, многие математики и ученые сомневались, может ли обычное физическое пространство искривляться, хотя успех евклидовой теории геометрия до того времени означала, что радиус кривизны должен быть астрономически большим. В теории общей теории относительности, которая описывает гравитацию и космологию, идея слегка обобщается до «кривизны пространства-времени »; в теории относительности пространство-время - это псевдориманово m анифолд. Как только временная координата определена, трехмерное пространство, соответствующее конкретному времени, обычно является искривленным римановым многообразием; но поскольку выбор временной координаты в значительной степени произвольный, физически значимым является кривизна лежащего в основе пространства-времени.
Хотя произвольно искривленное пространство очень сложно описать, кривизна пространства, которое является локально изотропным и однородным, описывается одной гауссовой кривизной, как для поверхность; математически это сильные условия, но они соответствуют разумным физическим допущениям (все точки и все направления неразличимы). Положительная кривизна соответствует обратному квадрату радиуса кривизны; пример - сфера или гиперсфера. Примером отрицательно искривленного пространства является гиперболическая геометрия. Пространство или пространство-время с нулевой кривизной называется плоским . Например, евклидово пространство является примером плоского пространства, а пространство Минковского является примером плоского пространства-времени. Однако в обеих настройках есть и другие примеры плоской геометрии. И тор, и цилиндр могут иметь плоские метрики, но отличаются своей топологией. Для искривленного пространства также возможны другие топологии. См. Также форма вселенной.
Математическое понятие кривизны также определяется в гораздо более общем контексте. Многие из этих обобщений подчеркивают различные аспекты кривизны, как это понимается в более низких измерениях.
Одно из таких обобщений - кинематическое. Кривизну кривой, естественно, можно рассматривать как кинематическую величину, представляющую силу, которую испытывает определенный наблюдатель, движущийся по кривой; аналогично, кривизна в более высоких измерениях может рассматриваться как своего рода приливная сила (это один из способов понимания поперечной кривизны ). Это обобщение кривизны зависит от того, как соседние пробные частицы расходятся или сходятся, когда им позволяют свободно перемещаться в пространстве; см. Поле Якоби.
Другое широкое обобщение кривизны получено при изучении параллельного переноса на поверхности. Например, если вектор перемещается по петле на поверхности сферы, сохраняя параллельность на протяжении всего движения, то конечное положение вектора может не совпадать с исходным положением вектора. Это явление известно как голономия. Различные обобщения в абстрактной форме фиксируют эту идею кривизны как меры голономии; см. форму кривизны. Тесно связанное с этим понятие кривизны происходит из калибровочной теории в физике, где кривизна представляет собой поле, а векторный потенциал для поля является величиной, которая в целом зависит от пути: это может измениться, если наблюдатель перемещается по петле.
Еще два обобщения кривизны - это скалярная кривизна и кривизна Риччи. На изогнутой поверхности, такой как сфера, площадь диска на поверхности отличается от площади диска того же радиуса в плоском пространстве. Эта разница (в подходящем пределе) измеряется скалярной кривизной. Разница в площади сектора диска измеряется кривизной Риччи. Каждая из скалярной кривизны и кривизны Риччи определяется аналогичным образом в трех и более измерениях. Они особенно важны в теории относительности, где они оба появляются на стороне уравнений поля Эйнштейна, которые представляют геометрию пространства-времени (другая сторона которого представляет присутствие материи и энергии). Эти обобщения кривизны лежат в основе, например, представления о том, что кривизна может быть свойством меры ; см. кривизна меры.
Другое обобщение кривизны основывается на способности сравнивать искривленное пространство с другим пространством, имеющим постоянную кривизну. Часто это делается с помощью треугольников в пробелах. Понятие треугольника имеет смысл в метрических пространствах, и это порождает пространства CAT (k).
| Найдите curvature в Wiktionary, бесплатном словаре. |
| Викискладе есть материалы, связанные с Кривизной. |