
Войти
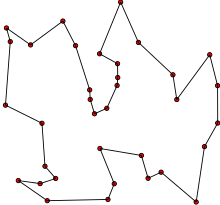 Решение задачи коммивояжера: черная линия показывает кратчайшую возможную петлю, соединяющую каждую красную точку.
Решение задачи коммивояжера: черная линия показывает кратчайшую возможную петлю, соединяющую каждую красную точку. 261>задача коммивояжера (также называемая задаваемая коммивояжера или TSP ) задает следующий вопрос: «Учитывая список городов и расстояния между каждым парой городов, каков самый короткий маршрут, который посетит каждый город ровно один раз и вернется в исходный город? "Это NP-сложная проблема в комбинаторной оптимизации, важная в теоретической информатике и исследование операций.
Проблема путешествующего покупателя. и задача выбора маршрута обеспечивает обобщением TSP.
В теории вычислительной сложности версия решения TSP (где задана длина L, задача в том, решить, имеет ли) граф обход не более любого L) принадлежит класс НП-полных. Таким образом, возможно, что наихудшее время выполнения для алгоритма для TSP увеличивается суперполиномиально (но не более чем экспоненциально ) с использованием городов.
Проблема была впервые сформулирована в 1930 году и является одним из наиболее интенсивно изучаемых проблем оптимизации. Несмотря на то, что проблема сложного в вычислительном отношении метода оптимизации, существует множество эвристик и <18. 8>точных алгоритмов, так что некоторые экземпляры с десятками тысяч городов могут быть решены полностью и даже проблемы с миллионами городов могут быть решены. быть приблизительно в пределах небольшой доли 1%.
У TSP есть несколько применений даже в его самой чистой формулировке, таких как планирование, логистика и производство микросхемы. Слегка измененный, он появляется как подзадача во многих областях, таких как секвенирование ДНК. В этих приложениях концептуальный город представляет, например, клиенты, точки пайки или фрагменты ДНК, концептуальное расстояние представляет собой время в пути или стоимости, или меру сходства между фрагментами ДНК. TSP также появляется в астрономии, поскольку астрономы наблюдают за множеством источников, захотят минимизировать время, затрачиваемое перемещение телескопа между источниками. Во многих приложениях могут быть наложены дополнительные ограничения, такие как ограниченные ресурсы или временные окна.
Истоки проблемы коммивояжера неясны. В справочнике для коммивояжеров 1832 года упоминается эта проблема и приводятся примеры туров по Германии и Швейцарии, нет математической обработки.
 Уильям Роуэн Гамильтон
Уильям Роуэн Гамильтон Задача коммивояжера был математически сформулирован в 1800-х годах ирландским математиком WR Гамильтон и британский математик Томас Киркман. иканская игра Гамильтона была развлекательной головоломкой, основанной на обучении гамильтонова цикла. Общая форма TSP, по-видимому, была впервые изучена математиками в 1930-х годах в Вене и в Гарварде, в частности Карлом Менгером, который определяет проблему, рассматривает очевидный алгоритм грубой силы и наблюдает за неоптимальность эвристики ближайшего соседа :
Обозначим через проблему посыльного (как на практике этот вопрос должен решать каждый почтальон, во всяком случае, также многие путешественники) задача найти для конечного числа точек, попарные расстояния которых известны, кратчайший маршрут, соединяющий точки. Конечно, эта проблема решается конечным числом испытаний. Правила, которые приводят бы к тому, что количество попыток уменьшить количество перестановок данных точек, не известно. Правило, согласно которому сначала нужно пройти от начальной точки к ближайшей точке, а затем к ближайшей точке ней и т. Д., В общем случае не дает кратчайшего пути.
Впервые оно было рассмотрено математически в 1930-х годах Меррилл М. Флуд, который искал решение проблемы маршрутизации школьного автобуса. Хасслер Уитни из Принстонского университета вызвал интерес к проблеме, которую он назвал «проблемой 48 штатов». Самой ранней публикацией, в которой использовалась фраза «проблема коммивояжера», был отчет 1949 года RAND Corporation от Джулии Робинсон «О гамильтоновой игре (задачамивояжера)»
В 1950-х и 1960-х годах проблема становилась все более популярной в научных кругах Европы и США после того, как RAND Corporation в Санта-Монике предложила призы за шаги в решении проблемы Заметный вкладесли Джордж Данциг, Делберт Рэй Фулкерсон и Селмер М. Джонсон из корпорации RAND, которые выразили проблему как целочисленный линейный программа и разработала метод плоскости отсечения для ее решений. Они написали то, что считается основополагающей статьей по этому вопросу, с помощью которых эти новые методы разрешили пример с 49 городами до оптимальности, построив тур и доказав, что никакой никакой Данциг, Фулкерсон и Джонсон, однако, предположили, что, имея почти оптимум, другой тур не может быть короче. альное решение, мы можем найти оптимальность или доказать оптимальность, добавив небольшое количество дополнительных неравенств (сокращений). Они использовали эту идею для решения своей первоначальной задачи 49 с помощью струнной модели. Они, что им нужно всего 26 сокращений, чтобы решить их 49 городских проблем. Хотя эта статья не давала алгоритмического подхода к проблемам TSP, идеи, заложенные в ней, необходимы для последующего создания точных методов решения TSP, хотя для поиска алгоритмического подхода к созданию этих сокращений потребовалось 15 лет. Помимо методов отсечения плоскости, Данциг, Фулкерсон и Джонсон, возможно, впервые использовали алгоритмы ветвей и границ.
В 1959 году Джиллиан Бирдвуд, J.H. Хэлтон и Джон Хаммерсли опубликовали статью, озаглавленную «Кратчайший путь через многие точки» в журнале Кембриджского философского общества. Теорема Бирдвуда - Халтона - Хаммерсли дает практическое решение проблемы коммивояжера. Авторы вывели асимптотическую формулу для определения кратчайшего маршрута для продавца, который начинает свой путь из дома или офиса и посещает фиксированное количество мест, прежде чем вернуться к началу.
В последующие десятилетия эту проблему изучали многие исследователи из математики, информатики, химии, физики и науки. В 1960-х годах был создан новый подход, согласно которому вместо поиска оптимальных решений можно было получить решение, длина которого доказуемо ограничена кратной оптимальной длине, и тем самым создать нижние границы для задачи; затем их можно использовать с подходами ветвления и ограничения. Один из способов сделать это состоял в том, чтобы создать минимальное остовное дерево графа, а затем удвоить все его ребра, что дает оценку, согласно которой длина оптимального маршрута не более чем в два раза максимального остовного дерева..
В 1976 году Христофидес и Сердюков независимо друг от друга большой шаг вперед в этом направлении сделали: алгоритм Христофидеса-Сердюкова дает решение, которое в худшем случае не дольше 1,5 раз, чем оптимальное решение. Прогнозируемый алгоритм. Это остается методом наихудшего сценария. Однако для довольно общего частного случая в 2011 году она была превзойдена с небольшим отрывом.
Ричард М. Карп показал в 1972 году, что проблема гамильтонова цикла была NP -полное, что подразумевает NP-твердость TSP. Это дало математическое объяснение очевидной вычислительной сложности поиска оптимальных маршрутов.
Большой прогресс был достигнут в конце 1970-х и 1980-х годах, когда Грёчелю, Падбергу, Ринальди и другим удалось точно решить случаи с 2392 городами, используя плоскости разрезов и переходы и границы.
в 1990-е годы Applegate, Bixby, Chvátal и Cook разработали программу Concorde, которая использовалась во многих последних решениях для звукозаписи. Герхард Райнельт опубликовал TSPLIB в 1991 году, сборник эталонных тестов различной сложности, который использовался среди исследовательских групп для сравнения результатов. В 2006 году Кук и другие вычислили тур по экземпляру с 85 900 городами, заданным проблемой компоновки микрочипа, который в настоящее время является решенным экземпляром TSPLIB. Для многих других случаев с миллионами городов можно найти решения, которые гарантированно существуют в пределах 2–3% от оптимального маршрута.
В 2020 году был разработан слегка улучшенный алгоритм аппроксимации.
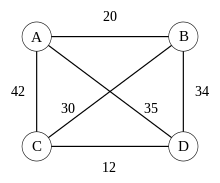 Симметричный TSP с четырьмя городами
Симметричный TSP с четырьмя городами TSP может быть смоделирован как неориентированный взвешенный граф, так что проблема города является вершинами графа, пути - это ребра графа, а расстояние пути - это вес ребра. Это задача минимизации, которая начинается и заканчивается в вершине после посещения друг друга вершины ровно один раз. Часто модель представляет собой полный граф (т.е. каждая пара вершин соединена ребром). Если пути между двумя городами не существует, добавление произвольно длинного ребра завершит граф, не влияя на другой маршрут.
В симметричном TSP расстояние между двумя городами одинаково во всех противоположных направлениях, образуя неориентированный граф. Эта симметрия вдвое сокращает количество решений. В асимметричном TSP пути могут не существовать в обоих направлениях или расстояниях разными, образуя ориентированный граф. Дорожные происшествия, улицы с односторонним движением и цены на авиабилеты для городов с разными сборами при отправлении и прибытии - примеры того, как эта симметрия может нарушиться.
TSP можно сформулировать как целочисленную линейную программу. Известно несколько составов. Двумя форму примечательными формулировками являются формулировка Миллера - Таккера - Землина (MTZ) ила Данцига - Фулкерсона - Джонсона (DFJ). Формулировка DFJ сильнее, хотя формулировка MTZ все еще полезна в определенных условиях.
Обозначьте города цифрами 1,…, n и определите:

Для i = 1,…, n пусть 


Первый набор равенств требует, чтобы каждый город прибыл ровно из одного другого города, а Второй набор равенств требует, чтобы из каждого города был вылет ровно в один другой город. Последние ограничения требуют, чтобы был только один тур, охватывающий все города только вместе. Чтобы доказать это, ниже показано (1), что возможное возможное решение включает только одну замкнутую последовательность последовательностей, и (2) что для каждого отдельного тура, охватывающего все города, есть значения для фиктивных чисел
Чтобы доказать, что каждое возможное решение содержит только одну замкнутую последовательность городов, достаточно показать, что каждый субтур в допустимом решении проходит через город 1 (что такое тур может быть только один). Ведь если мы просуммируем все неравенства, соответствующие 

; противоречие.
Теперь необходимо показать, что для каждого отдельного тура, охватывающего все города, есть значения для фиктивных чисел
Без потерь общности, определите как начинающийся (и заканчивающийся) в городе 1. Выберите 

поскольку 


удовлетворяет ограничению.
Обозначьте города цифрами 1,…, n и определите:
Возьмите 

Последнее ограничение в формулировке DFJ гарантирует, что среди нестартовых вершин не будет дополнительных обходов, поэтому возвращаемое решение является одним обходом, а не объединением меньших обходов. Поскольку это приводит к экспоненциальному количеству возможных ограничений, на практике это решается с помощью отложенной генерации столбцов.
Традиционные направления атаки для NP-сложных проблем следующие:
Самым прямым решением было бы все перестановки (упорядоченные комбинации) и посмотрите, какая из них самая дешевая (используя поиск грубой силы ). Время выполнения этого подхода находится в пределах полиномиального множителя 
Одним из первых применений динамического программирования является алгоритм Хельда - Карпа, который решает проблему во времени 
 Решение симметричной ТСП с 7 города с использованием метода перебора. Примечание: количество перестановок: (7-1)! / 2 = 360
Решение симметричной ТСП с 7 города с использованием метода перебора. Примечание: количество перестановок: (7-1)! / 2 = 360 Улучшение этих временных рамок кажется трудным. Например, не было определено, работает ли точный алгоритм для TSP за время
Другие подходы включают:
 Решение TSP с 7 с использованием простого алгоритма ветвей и границ. Примечание: количество перестановок намного меньше, чем при поиске методом грубой силы
Решение TSP с 7 с использованием простого алгоритма ветвей и границ. Примечание: количество перестановок намного меньше, чем при поиске методом грубой силы Точное решение для 15 112 немецких городов из TSPLIB было найдено в 2001 году с помощью метода секущей плоскости, предложенное Джорджем Данцигом, Рэем Фалкерсоном, и Селмер М. Джонсон в 1954 году на основе линейного программирования. Вычисления выполнялись в сети из 110 процессоров, используя в Университете Райса и Принстонском университете. Общее время вычислений было эквивалентно 22,6 года на одном процессоре Alpha 500 МГц . В мае 2004 года проблема коммивояжера о посещении всех 24 978 городов Швеции была решена: был найден тур протяженностью около 72 500 километров, и было доказано, что более короткого тура не существует. В марте 2005 г. проблема коммивояжера, связанная с посещением всех 33 810 точек на печатной плате, была решена с помощью Concorde TSP Solver : был найден маршрут длиной 66 048 945 единиц, и было доказано, что более короткого маршрута не существует. Вычисление заняло приблизительно 15,7 CPU-лет (Cook et al. 2006). В апреле 2006 г. пример с 85 900 точками был решен с помощью Concorde TSP Solver, что заняло более 136 процессорных лет, см. Эпплгейт и др. (2006).
Различные эвристические и алгоритмы аппроксимации, которые быстро дают хорошие решения. К ним относ Многофрагментный алгоритм. Современные методы позволяют находить решения для больших проблем (миллионы городов) за разумное время, которые с высокой вероятностью отклоняются всего на 2–3% от оптимального решения.
Различают несколько категорий эвристики.
 Алгоритм ближайшего соседа для TSP с 7 городами. Решение изменилось по мере изменения начальной точки
Алгоритм ближайшего соседа для TSP с 7 городами. Решение изменилось по мере изменения начальной точки Алгоритм ближайшего соседа (NN) (жадный алгоритм ) продавцу позволяет выбрать ближайший непосещаемый город в качестве следующего шага. Этот алгоритм быстро дает эффективный короткий маршрут. Для N городов, случайно распределенных на плоскости, алгоритм в среднем дает путь на 25% длиннее кратчайшего из преступника. Однако существует множество специально организованных распределений городов, благодаря которому NN дает наихудший маршрут. Это верно как для асимметричных, так и для симметричных TSP. Rosenkrantz et al. показал, что алгоритм NN имеет коэффициент аппроксимации 
битонный обход набора точек - это монотонный многоугольник с минимальным периметром, вершинами которой являются точки; его можно эффективно вычислить с помощью динамического программирования.
Другая конструктивная эвристика , Match Twice and Stitch (MTS), выполняет два последовательных сопоставления, где второе сопоставление выполняется после удаления всех краев первого совпадения, чтобы получить набор циклов. Затем циклы сшиваются для создания финального тура.
Алгоритм Христофидеса и Сердюкова следует аналогичной схеме, но сочетает в себе минимальный охват дерево с решением другой задачи, минимальный вес идеальное соответствие. Это дает тур TSP, который не более чем в 1,5 раза лучше. Это был один из первых алгоритмов приближения, который частично отвечал за привлечение внимания к алгоритмам приближения как практическому подходу к неразрешимым задачам. Фактически, алгоритм «алгоритм» обычно не распространялся на алгоритмы аппроксимации до более позднего времени; алгоритм Кристофидеса назывался эвристикой Кристофидеса.
Этот алгоритм смотрит на вещи по-другому, используя результат теории графов, который помогает улучшить LB TSP, который возник благодаря удвоению стоимости минимального охвата дерево. Учитывая эйлеров граф, мы можем найти эйлеров тур за 
 Использование эвристики быстрого доступа на графе, созданное сопоставлением ниже
Использование эвристики быстрого доступа на графе, созданное сопоставлением ниже Чтобы улучшить нижнюю границу, необходимо создать эйлерова графа. Согласно треугольному неравенству, лучший эйлеровых графов должен иметь ту же стоимость, что и лучший коммивояжера, следовательно, поиск оптимальных эйлеровых графов не менее сложен, чем TSP. Один из способов сделать это - минимальный вес сопоставления с использованием алгоритмов 
 Создание сопоставления
Создание сопоставления Создание граф в эйлеров граф начинается с минимального остовного дерева. Тогда все вершины нечетного порядка нужно сделать четными. Таким образом, необходимо добавить сопоставление для вершин нечетной степени, увеличивая каждую вершины нечетной степени на единицу. Это оставляет нам граф, в которой каждая вершина имеет четный порядок, таким образом, является эйлеровым. Адаптация описанного метода дает алгоритм Христофидеса и Сердюкова.
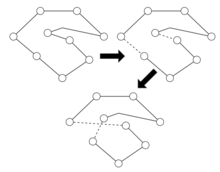 Пример итерации с двумя вариантами
Пример итерации с двумя вариантами Попарный обмен или метод 2-opt включает итеративно удаление двух кромок и замену их двумя кромками, которые повторно соединяют фрагменты, созданные удалением кромки, в новый и более короткий маршрут. Точно так же метод 3-opt удаляет 3 ребра и повторно соединяет их, чтобы сформировать более короткий маршрут. Это частные случаи k-opt метода. Ярлык Lin-Kernighan - это часто встречающееся неправильное название 2-opt. Лин - Керниган на самом деле является более общим методом k-opt.
Для евклидовых примеров эвристика двумя способами дает в среднем решения, которые примерно на 5% лучше, чем алгоритм Кристофидеса. Если мы начнем с первоначального решения, сделанного с помощью жадного алгоритма, среднее количество ходов снова сильно уменьшится и составит 
Эвристика Лин - Кернигана является частным случаем техники V-opt или variable-opt. Он включает в себя следующие шаги:
Наиболее популярными из k-opt методов являются 3-opt, как представил Шен Лин из Bell Labs в 1965 году. Особый случай 3-opt - это когда края не пересекаются (два ребра смежны друг с другом). На практике можно достичь большего улучшения по сравнению с двумя вариантами без дополнительных трех вариантов, ограничивая 3 изменения этим специальным подмножеством, где два из удаленных ребер являются соответствующими. Этот так называемый «два с половиной варианта» обычно находится примерно посередине между 2-мя и 3-мя вариантами, как с точки зрения качества достигнутых туров, так и времени, необходимого для их выполнения.
Метод переменной-opt относится к методу k-opt и является его обобщением. В то время как методы k-opt удаляют фиксированное количество (k) ребер из исходного маршрута, методы variable-opt не фиксируют размер удаляемого ребра. Вместо этого они увеличивают набор по мере продолжения процесса поиска. Самый известный метод в этом семействе - метод Лин-Кернигана (упомянутый выше как неправильное название 2-opt). и Брайан Керниган впервые опубликовал свой метод в 1972 году, и он был наиболее надежным эвристическим методом для решения задач коммивояжера на протяжении почти двух десятилетий. Более продвинутые методы с переменной оптикой были разработаны в Bell Labs в конце 1980-х Дэвидом Джонсоном и его группой исследователей. Эти методы (иногда называемые) основаны на методе Лина – Кернигана, добавляя идеи из запретного поиска и эволюционных вычислений. Базовая техника Лин-Кернигана дает результаты, которые гарантированно являются как минимум 3-опт. Методы Lin – Kernighan – Johnson вычисляют тур Lin – Kernighan, а затем возмущают тур тем, что было описано как мутация, которая удаляет по крайней мере четыре ребра и повторно соединяет тур другим способом, а затем V-выбор нового тура. Мутации часто бывает достаточно, чтобы переместить маршрут от локального минимума, идентифицированного Лин-Керниган. Методы V-opt широко считаются наиболее мощными эвристиками для решения проблемы и способны решать особые случаи, такие как проблема цикла Гамильтона и другие неметрические TSP, которые не удается решить с помощью других эвристик. В течение многих лет Лин-Керниган-Джонсон выявлял оптимальные решения для всех операторов связи, для которых было известно оптимальное решение, и определял наиболее известные решения для всех других поставщиков услуг связи, на которых опробовался этот метод.
Оптимизированные алгоритмы цепи Маркова, которые используют локальные эвристические подалгоритмы поиска, могут найти маршрут, очень близкий к оптимальному маршруту для 700–800 городов.
TSP - это пробный камень для многих общих эвристик, разработанных для комбинаторной оптимизации, таких как генетические алгоритмы, моделирование отжига, запретный поиск, Оптимизация колонии муравьев (см. интеллект роя ) и метод перекрестной энтропии.
Искусственный интеллект исследователь Марко Дориго описал в 1993 г. был разработан метод эвристической генерации "хороших решений" для TSP с использованием моделирования колонии муравьев, названного ACS (система муравьиных колоний). Он моделирует поведение, наблюдаемое у настоящих муравьев, чтобы найти короткие пути между источниками пищи и их гнездом, возникающее поведение, возникающее в результате предпочтения каждого муравья следовать феромонам, отложенным другими муравьями.
СКУД рассылает большое количество виртуальных агентов-муравьёв, чтобы использовать последовательность агентов на карте. Каждый муравей вероятностно выбирает следующий город для посещения на основе эвристики, объединяющего расстояние до города и количество виртуального феромона, отложенного на окраине города. Муравьи исследуют, откладывая феромоны на каждом пересечении границы, пока все неатат путешествие. В этот момент муравей, завершивший самый короткий тур, откладывает виртуальный феромон на протяжении всего маршрута (глобальное обновление следа). Количество отложенного феромона обратно пропорционально длине тура: чем короче тур, тем больше он откладывается.

 Алгоритм оптимизации муравьиной колонии для TSP с 7 городами: Красные и толстые линии на карте феромонов указывают на присутствие большего количества феромонов
Алгоритм оптимизации муравьиной колонии для TSP с 7 городами: Красные и толстые линии на карте феромонов указывают на присутствие большего количества феромонов В метрике TSP также известный как дельта-TSP или Δ-TSP, междугородные расстояния удовлетворяют неравенству треугольника .
. Очень естественным ограничением TSP требование, чтобы расстояние между городами образовывали метрику для удовлетворения неравенство треугольника ; то есть прямое соединение от A до B никогда не дальше, чем маршрут через промежуточный C:
 .
.Затем ребро простирается на метрику на множестве вершин. Когда города исследуют как точки на плоскости, многие естественные естественные являются метриками, и очень многие естественные естественные экземпляры TSP удовлетворяют этому ограничению.
Вот несколько показателей показателей TSP для различных показателей.
Последние два показателя появляются, например, при трассировке машины, которая просверливает заданный набор отверстий в печатной плате. Метрика Манхэттена соответствует машине, которая настраивает сначала одну координату, а затем, поэтому время для перехода новой точкой является суммой обоих перемещений. Максимальная метрика соответствует машине, которая регулирует обе координаты одновременно, поэтому время для перехода к новой точке будет более медленным из двух перемещений.
В своем определении TSP не позволяет посещать города дважды, но многим приложениям это ограничение не требуется. В таких случаях симметричный неметрический экземпляр можно свести к метрическому. Это заменяет исходный график полным графиком, в котором расстояние между городами 
Когда входные числа могут быть произвольными действительными числами, евклидова TSP является частным случаем метрического TSP, поскольку расстояния в плоскости подчиняются неравенству треугольника. Если входные числа должны быть целыми числами, сравнение продолжительности обходов включает сравнение сумм квадратных корней.
Как и общий TSP, евклидова TSP в любом случае NP-сложна. С рациональными координатами и дискретной метрикой (расстояния округлены до целого числа) проблема NP-полная. Известно, что евклидова TSP с рациональными координатами и фактической евклидовой метрикой находится в Иерархии подсчета, подклассе PSPACE. С произвольными действующими координаторами евклидова TSP не может быть в таких классах, поскольку существует несчетное количество входов. Однако евклидова TSP, вероятно, является самой простой версией для приближения. Например, минимальное остовное дерево графа, связанного с экземплярами евклидова TSP, евклидовым минимальным остовным деревом, и поэтому может быть вычислено за ожидаемое время O (n log n) для n точек (значительно меньше количества ребер). Это позволяет более быстрому выполнению простого алгоритма двух приближений для TSP с указанным выше неравенством треугольника.
В общем, для любого c>0, где d - количество измерений в евклидовом пространстве, существует с алгоритмом полиномиальным временем, который находит длину не более (1 + 1 / c) раз лучше для геометрических примеров TSP в

время; это называется схемой полиномиального приближения (PTAS). Санджив Арора и Джозеф С.Б. Митчелл были удостоены премии Гёделя в 2010 году. за их одновременное открытие PTAS для евклидовой TSP.
На науку проститутки простые эвристики с более слабыми гарантиями.
В большинстве случаев между двумя узлами в сети TSP одинаково в обоих направлениях. Случай, когда расстояние от A до B не равно расстоянию от B до A, называется асимметричным TSP. Практическое применение асимметричной TSP - оптимизация маршрута с использованием маршрутизации на уровне улиц (которая делается асимметричной из-за улиц с односторонним движением, объездных дорог, автомагистралей и т. Д.).
Решение асимметричного графа TSP может быть несколько сложным. Ниже представлена матрица 3 × 3, содержащая все возможные веса путей между узлами A, B и C. Один из вариантов - превратить асимметричную матрицу размера N в симметричную матрицу размера 2N.
| A | B | C | |
|---|---|---|---|
| A | 1 | 2 | |
| B | 6 | 3 | |
| C | 5 | 4 |
Чтобы удвоить размер, из узлов в графе дублируется, создавая второй призрачный узел, связанный с исходным узлом с «призрачным» краем очень низкого (возможно, отрицательного) веса, здесь обозначенного -w. (В качестве альтернативы, фантомные края имеют вес 0, а вес добавляется всем остальным ребрам.) Первоначальная матрица 3 × 3, показанная выше, видна в нижнем левом углу, транспонированная копия оригинала - в верхнем правом углу. В обеих копиях матрицы диагонали заменены на недорогие переходные пути обозначенные -w. В новом графе ни одно ребро напрямую не связывает исходные узлы, а никакое ребро напрямую не связывает призрачные узлы.
| A | B | C | A′ | B′ | C ′ | |
|---|---|---|---|---|---|---|
| A | −w | 6 | 5 | |||
| B | 1 | −w | 4 | |||
| C | 2 | 3 | −w | |||
| A ′ | −w | 1 | 2 | |||
| B ′ | 6 | −w | 3 | |||
| C ′ | 5 | 4 | −w |
Вес −w «фантомных» ребер, связывающих призрачные узлы с соответствующими исходными узлами должны быть Все призрачные ребра должны принадлежать любому оптимальному симметричному решению TSP на новом графе (w = 0 не всегда низкое). Как следствие, в оптимальном симметричном туре каждый исходный узел появляется со своим призрачным узлом (например, возможный путь рядом: 

В геометрической теории меры существует аналогичная проблема, которая ставит следующий вопрос: при каких условиях может подмножество E из содержаться в спрямляемой кривой (то есть, когда существует кривая конечная длина, которая посещает каждую точку в E)? Эта проблема известна как задача коммивояжера аналитика.
Предположим, 

![[0,1] ^ {2}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e2fd6e9b0db782a26c033d7c728aadac9eec363a)


где 

![\ beta = \ lim _ {n \ to \ infty} \ mathbb {E} [L_ {n} ^ {*}] / {\ sqrt {n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/797ef104f2559647e6ccf80ade649f04e1e0b21a)
![\ mathbb {E} [ L_ {n} ^ {*}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/f4bc3bf083f708f938ee8798c74d2efffb0fe6be)
Почти верный предел 

 , и, следовательно,
, и, следовательно,  , используя наивный путь, который vi монотонно размещает точки внутри каждого из
, используя наивный путь, который vi монотонно размещает точки внутри каждого из  срезов шириной
срезов шириной  в квадрате.
в квадрате. , следовательно,
, следовательно,  , позже улучшенный Karloff (1987):
, позже улучшенный Karloff (1987):  .
. .
. .больше чем раз расстояние между
.больше чем раз расстояние между  и ближайшая точка
и ближайшая точка  , получается (после короткого вычисления)
, получается (после короткого вычисления)![\ mathbb {E} [L_ {n} ^ {*}] \ geq {\ tfrac {1} {2}} {\ sqrt {n}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/84b7371bf7d7fff1a1a5ab12576c8ad55bf7105d) больше, чем
больше, чем  , умноженное на величину расстояний между и ближайшей и второй ближайшими точками
, умноженное на величину расстояний между и ближайшей и второй ближайшими точками  , что дает
, что дает![\ mathbb {E} [L_ {n} ^ {* }] \ geq \ left ({\ tfrac {1} {4}} + {\ tfrac {3} {8}} \ right) {\ sqrt {n}} = {\ tfrac {5} {8}} { \ sqrt {n}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/db6d7b36c9d312d068b8bd0090d43c0ca0e57a13)
![\ mathbb {E} [L_ {n } ^ {*}] \ geq ({\ tfrac {5} {8}} + {\ tfrac {19} {5184}}) {\ sqrt {n}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e91269e8daee05893c12acdd3590f834d577568)
 , и, таким образом, для
, и, таким образом, для  , которые кажутся хорошими до более или менее 1%. В частности, Дэвид С. Джонсон получил нижнюю границу с помощью компьютерного эксперимента:
, которые кажутся хорошими до более или менее 1%. В частности, Дэвид С. Джонсон получил нижнюю границу с помощью компьютерного эксперимента:
где 0,522 происходит от точек около квадратной границы, у которых меньше соседей, а Кристин Л. Валенсуэла и Антония Дж. Джонс получили следующую числовую нижнюю границу:
 .
.Было показано, что проблема NP-трудная (более точно, он является полным для класса сложности FP; см. функциональная задача ) и версии задачи решения («с учетом затрат и числа x, решить, есть ли маршрут туда и обратно дешевле, чем x») NP-complete. Проблема коммивояжера - Проблема остается NP-сложной даже для случая, когда находятся города в плоскости с евклидовыми расстояниями, а также в некоторых других ограничительных случаях. снимает NP-жесткость, поскольку в плоском случае существует последний тур, который посещает город только один раз (в противном случае, согласно неравеника , ярлык, пропускающий повторное п осещение, не увеличивает продолжительность тура).
В общем случае поиск кратчайшего тура коммивояжера НПО завершен. Если мера расстояния является метрикой (и, следовательно, симметричной), проблема становится APX -полной, и алгоритм Христофидеса и Сердюкова приближает ее с точностью до 1,5. В препринте 2020 эта оценка улучшена до 1,5-10. Наиболее известная граница неаппроксимируемости - 123/122.
Если расстояния ограничены 1 и 2 (но все же являются метрикой), коэффициент аппроксимации становится 8/7. В асимметричном случае с неравенством треугольника известны только логарифмические гарантии производительности, лучший алгоритм производительности производительности 0,814 log (n); это открытый вопрос, существует ли приближение постоянного множителя. Самая известная граница неприближаемости - 75/74.
Соответствующая задача максимизации поиска самого длинного путешествия коммивояжера аппроксимируется в пределах 63/38. Если функция расстояния симметрична, самый длинный тур может быть аппроксимирован в пределах 4/3 с помощью детерминированного алгоритма и в пределах 
TSP, в частности евклидов вариант проблемы, привлекательные Внимание исследователей в когнитивной психологии. Работа почти на 1% меньше, чем на 1% меньше, чем на 120 узлов. Очевидная легкость, с которой люди точно используют одну или несколько эвристиков, которые используют одну или несколько эвристиков, возможно, являются гипотезой выпуклой оболочки и эвристика пересечений. Однако дополнительные данные свидетельствуют о том, что возможности человека весьма различны, а также геометрия графиков, по-мнению, имеет значение при выполнении задачи. Тем не менее, результаты показывают, что производительность компьютера на TSP может быть улучшена путем распознавания и эмуляции методов, используемых людьми для решения этих проблем, а также используется новое понимание механизмов человеческого мышления. Первый выпуск журнала «Решение проблем» был посвящен теме действий человека в отношении TSP, а в обзоре 2011 года были десятки статей по теме.
Исследование 2011 года в познании животных под названием «Пусть голубь водит автобус», названный в честь детской книги Не позволяй голубю водить автобус!, исследовал пространственное познание голубей, изучая их схемы пространственного познания между кормушками в лаборатории во взаимодействии к задаче коммивояжера. В первом эксперименте голубей помещали в угол лаборатории и позволяли летать к ближайшим кормушкам, содержащим горох. Исследователи показывают, что голуби в основном используют близость. Во втором эксперименте кормушки были устроены таким образом, что перелет к ближайшей кормушке при любой возможности был бы в степени неэффективным, если бы голубям приходилось посещать каждую кормушку. Результаты второго эксперимента показывают, что голуби, по-прежнему отдавая предпочтение решениям, основанному на близости, «могут быть выполнены несколько шагов вперед по определению, когда разница в расходах на поездки между эффективными и менее эффективными маршрутами, основанными на близости, становится больше». Эти результаты согласуются с другими экспериментами, проведенными с неприматами, которые доказаны, что некоторые неприматы могут планировать сложные маршруты путешествий. Это предполагает, что неприматы могут обладать сложной пространственной познавательной способностью.
При представлении пространственной конфигурации источников пищи амебоид Physarum polycephalum адаптирует свою морфологию для создания эффективных путей между источниками питания, которые также можно рассматривать как приблизительное решение проблемы TSP. Считается, что он представляет возможности, и он был изучен интересные в области естественных вычислений.
Для тестирования алгоритмов TSP TSPLIB представляет собой библиотеку примеров экземпляров TSP и связанных проблем. поддерживается, см. внешнюю ссылку TSPLIB. Многие из них представляют собой списки городов и схем реальных печатных.
| На Wikimedia Commons есть материалы, связанные с проблемой коммивояжера. |
