В математике, обработка сигналов и теория управления, график полюс – ноль - это графическое представление рациональной передаточной функции в комплексной плоскости, которая помогает для передачи определенных свойств системы, таких как:
График нулевого полюса показывает расположение в комплексной плоскости полюсов и нулей передаточной функции динамической системы , такой как контроллер, компенсатор, датчик, эквалайзер, фильтр, или канал связи. По соглашению, полюса системы обозначены на графике знаком X, а нули обозначены кружком или O.
График полюс-нуль может представлять либо непрерывное время (CT), либо система с дискретным временем (ДТ). Для системы CT плоскость, в которой появляются полюса и нули, является плоскостью s преобразования Лапласа. В этом контексте параметр s представляет комплексную угловую частоту, которая является областью передаточной функции CT. Для системы DT плоскость - это плоскость z, где z представляет область Z-преобразования.
Содержание
- 1 Системы непрерывного времени
- 1.1 Полюса и нули
- 1.2 Область сходимость
- 1.3 Пример
- 2 Системы с дискретным временем
- 2.1 Полюса и нули
- 2.2 Область сходимости
- 2.3 Пример
- 3 См. также
- 4 Библиография
Непрерывное время системы
В общем, рациональная передаточная функция для непрерывной системы LTI имеет вид:

где
 и
и  являются полиномиальными mials в
являются полиномиальными mials в  ,
, - порядок полинома числителя,
- порядок полинома числителя, - m-й коэффициент полинома числителя,
- m-й коэффициент полинома числителя, - порядок полинома знаменателя, а
- порядок полинома знаменателя, а - n-й коэффициент полинома знаменателя.
- n-й коэффициент полинома знаменателя.
Либо M, либо N, либо оба могут быть равны нулю, но в реальных системах должно быть так, что  ; в противном случае усиление было бы неограниченным на высоких частотах.
; в противном случае усиление было бы неограниченным на высоких частотах.
Полюсы и нули
- нули системы являются корнями полинома числителя:
 такой, что
такой, что 
- полюса системы являются корнями полинома знаменателя:
 такой, что
такой, что  .
.
Область конвергенции
Область конвергенции (ROC) для данной передаточной функции CT представляет собой полуплоскость или вертикальную полосу, каждая из которых не содержит полюсов. В общем, ROC не уникален, и конкретный ROC в каждом конкретном случае зависит от того, является ли система причинной или антипричинной.
- Если ROC включает в себя мнимую ось, то система стабильна с ограниченным входом и ограниченным выходом (BIBO).
- Если ROC простирается вправо от полюса с наибольшим действительная часть (но не на бесконечности), тогда система является причинной.
- Если ROC простирается влево от полюса с наименьшей действительной частью (но не на отрицательной бесконечности), то система является антипричинной.
ROC обычно выбирается с учетом мнимой оси, поскольку для большинства практических систем важно иметь стабильность BIBO.
Пример

Эта система не имеет (конечных) нулей и двух полюсов:

и

График «полюс-ноль» будет выглядеть следующим образом:
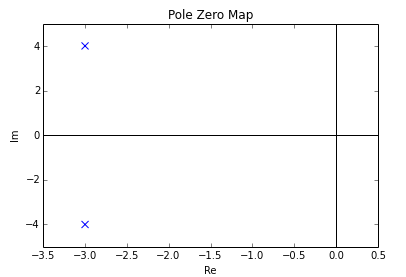
Обратите внимание, что эти два полюса являются комплексно сопряженными, что является необходимым и достаточным условием для получения действительных коэффициентов в разные иальное уравнение, представляющее систему.
Системы с дискретным временем
В общем случае рациональная передаточная функция для системы с дискретным временем LTI имеет вид:

где
- - это порядок полинома числителя,
- - m-й коэффициент полинома числителя,
- - это порядок полинома знаменателя, а
- - n-й коэффициент полинома знаменателя.
Либо M, либо N, либо оба могут быть равны нулю.
Полюсы и нули
 такие, что
такие, что  - нули системы
- нули системы такой, что
такой, что  - полюса системы.
- полюса системы.
Область конвергенции
Область конвергенции (ROC) для данной передаточной функции DT - это диск или кольцевое пространство, не содержащее полюсов. В общем, ROC не уникален, и конкретный ROC в каждом конкретном случае зависит от того, является ли система причинной или антипричинной.
- Если ROC включает в себя единичную окружность, тогда система стабильна с ограниченным входом и ограниченным выходом (BIBO).
- Если ROC выходит наружу от полюса с наибольшим ( но не бесконечной) величины, то система имеет правосторонний импульсный отклик. Если ROC выходит наружу от полюса с наибольшей величиной и нет полюса на бесконечности, тогда система является причинной.
- Если ROC простирается внутрь от полюса с наименьшей (ненулевой) величиной, то система является антипричинной.
ROC обычно выбирается для включения единичного круга, поскольку для большинства практических систем важно иметь стабильность BIBO.
Пример
Если  и
и  полностью разложены на множители, их решение может быть легко отображено в z-плоскость. Например, при следующей передаточной функции:
полностью разложены на множители, их решение может быть легко отображено в z-плоскость. Например, при следующей передаточной функции:

Единственный (конечный) ноль расположен в:  , а два полюса расположены по адресу:
, а два полюса расположены по адресу:  , где j - мнимая единица.
, где j - мнимая единица.
График «полюс – ноль» будет иметь вид:

См. также
Библиография


