Модель верхней полуплоскости гиперболической неевклидовой геометрии

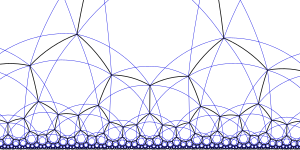
Параллельные лучи в модели полуплоскости Пуанкаре гиперболической геометрия
В неевклидовой геометрии модель полуплоскости Пуанкаре представляет собой верхнюю полуплоскость, обозначенную ниже как H вместе с тегом метрика, метрика Пуанкаре, которая делает ее моделью двумерной гиперболической геометрии.
вместе с тегом метрика, метрика Пуанкаре, которая делает ее моделью двумерной гиперболической геометрии.
. Иногда также описывается модель полуплоскости Пуанкаре. как комплексная плоскость, где мнимая часть (указанная выше координата y) положительна.
Модель полуплоскости Пуанкаре названа в честь Анри Пуанкаре, но он произошел от Эудженио Бельтрами, который использовал его вместе с моделью Клейна и моделью диска Пуанкаре (из-за Бернхарда Риман ), чтобы показать, что гиперболическая геометрия была равносогласованной с евклидовой геометрией.
Эта модель конформна, что означает, что углы, измеренные в точке, совпадают в режиме l, поскольку они находятся в реальной гиперболической плоскости.
Преобразование Кэли обеспечивает изометрию между моделью полуплоскости и моделью диска Пуанкаре.
Эту модель можно обобщить для моделирования  размерного гиперболического пространства, заменив действительное число x на вектор в n-мерном евклидовом векторном пространстве.
размерного гиперболического пространства, заменив действительное число x на вектор в n-мерном евклидовом векторном пространстве.
Содержание
- 1 Метрика
- 2 Особые точки и кривые
- 3 Построение циркуля и линейки
- 3.1 Построение линии через две существующие точки
- 3.2 Создание окружности через одну точку с центром в другой точке
- 3.3 Для данной окружности найти ее (гиперболический) центр
- 3.4 Другие конструкции
- 4 Группы симметрии
- 5 Изометрическая симметрия
- 6 Геодезические
- 7 Модель в трех измерениях
- 8 Модель в n измерениях
- 9 См. Также
- 10 Ссылки
Метрика
метрика модели на полуплоскость,  равно:
равно:

где s измеряет длину вдоль (возможно кривая). Прямые линии в гиперболической плоскости (геодезические для этого метрического тензора, т. е. кривые, которые минимизируют расстояние) представлены в этой модели дугами окружностей , перпендикулярными к оси x -оси (полукруги, начало которых находится на оси x) и прямые вертикальные лучи, перпендикулярные оси x.
Расчет расстояния
Обычно расстояние между двумя точками, измеренное в эта метрика вдоль такой геодезической равна:

где arcosh и arsinh - обратные гиперболические функции

Некоторые особые случаи можно упростить:
 .
.


Другой способ вычисления расстояния между двумя точками, находящимися на (евклидовой) половине c ircle:

где  - точки где полукруги пересекаются с линией границы и
- точки где полукруги пересекаются с линией границы и  - евклидова длина отрезка, соединяющего точки P и Q в модели.
- евклидова длина отрезка, соединяющего точки P и Q в модели.
Особые точки и кривые
- Идеальные точки (точки на бесконечности) в модели полуплоскости Пуанкаре бывают двух видов:
- точки на оси x и
- одна воображаемая точка в
 , которая является идеальной точкой, к которой все линии ортогональны к оси x сходятся.
, которая является идеальной точкой, к которой все линии ортогональны к оси x сходятся.
- Прямые, геодезические (кратчайший путь между точками, содержащимися в нем) моделируются либо:
- полукругами, начало которых находится на оси x
- прямые вертикальные лучи, перпендикулярные оси x
- A окружности (кривые, равноудаленные от центральной точки) с центром
 и радиус
и радиус  моделируется с помощью:
моделируется с помощью:
- круга с центром
 и радиус
и радиус 
- A hypercycle (эквидистантная кривая от прямой, ее ось) моделируется либо:
- дугой окружности который пересекает ось x в тех же двух идеальных точках, что и полукруг, моделирующий его ось, но под острым или тупым углом
- прямая линия, пересекающая ось x в та же точка, что и вертикальная линия, которая моделирует ее ось, но под острым или тупым углом.
- A гороциклом (кривая, нормали которой сходятся асимптотически в одном направлении, ее центре) либо:
- окружностью, касательной к оси x (но исключая идеальную точку пересечения, которая является ее центром);
- линией, параллельной оси x, в в данном случае центром является идеальная точка в точке .
евклидово синопсис
евклидова окружность с центром  и радиус
и радиус  представляет:
представляет:
- когда круг полностью находится внутри полуплоскости гиперболический круг с центром

- и радиус

- когда круг полностью находится внутри полуплоскости и касается границы орицикла с центром вокруг идеальной точки

- , когда круг пересекает границу ортогональная
 гиперболическая линия
гиперболическая линия - , когда круг пересекает границу не- ортогональный гиперцикл.
Конструкции циркуля и линейки
Вот как можно использовать конструкции компаса и линейки в модели, чтобы добиться эффекта базовых конструкций в гиперболическом самолет. Например, как построить полукруг в евклидовой полуплоскости, который моделирует линию на гиперболической плоскости через две заданные точки.
Создание линии через две существующие точки
Проведите отрезок линии между двумя точками. Постройте серединный перпендикуляр к отрезку прямой. Найдите его пересечение с осью абсцисс. Нарисуйте круг вокруг пересечения, которое проходит через заданные точки. Сотрите часть, которая находится на оси абсцисс или ниже нее.
Или в особом случае, когда две заданные точки лежат на вертикальной линии, проведите эту вертикальную линию через две точки и сотрите часть, которая находится на оси x или ниже.
Создание круга через одну точку с центром в другой точке
- Если две точки не находятся на вертикальной линии:
Нарисуйте радиальную линию (полукруг) между двумя заданными точками, как в предыдущий случай. Постройте касательную к этой линии в нецентральной точке. Опустите перпендикуляр из заданной центральной точки на ось абсцисс. Найдите пересечение этих двух линий, чтобы получить центр модельного круга. Нарисуйте модельный круг вокруг этого нового центра и проходящий через данную нецентральную точку.
- Если две заданные точки лежат на вертикальной линии и данный центр находится над другой заданной точкой:
Нарисуйте круг вокруг пересечения вертикальной линии и оси x, который проходит через данную центральную точку. Проведите горизонтальную линию через нецентральную точку. Постройте касательную к окружности на пересечении с этой горизонтальной линией.
Средняя точка между пересечением касательной с вертикальной линией и данной нецентральной точкой является центром модельной окружности. Нарисуйте модельный круг вокруг этого нового центра и проходящий через данную нецентральную точку.
- Если две заданные точки лежат на вертикальной линии и данный центр находится ниже другой заданной точки:
Нарисуйте круг вокруг пересечения вертикальной линии и оси x, проходящей через данную центральную точку. Проведите касательную линию к окружности, проходящей через данную нецентральную точку. Проведите горизонтальную линию через точку касания и найдите ее пересечение с вертикальной линией.
Середина между этим пересечением и данной нецентральной точкой является центром модельного круга. Нарисуйте модельный круг вокруг этого нового центра и проходящий через данную нецентральную точку.
Найдите (гиперболический) центр данной окружности.
Отбросьте перпендикуляр p от евклидова центра окружности к оси x.
Пусть точка q будет пересечением этой прямой и оси x.
Проведите касательную к окружности, проходящей через точку q.
Нарисуйте полукруг h с центром q, проходящий через точку пересечения касательной и окружности.
(гиперболический) центр - это точка пересечения h и p.
Другие конструкции
- Создание точки, являющейся пересечением двух существующих линий, если они пересекаются:
Найдите пересечение двух заданных полукругов (или вертикальных линий).
- Создание одной или двух точек на пересечении прямой и окружности (если они пересекаются):
Найдите точку пересечения данного полукруга (или вертикальной линии) с данной окружностью.
- Создание одной или двух точек на пересечении двух окружностей (если они пересекаются):
Найдите пересечение двух заданных окружностей.
Группы симметрии
Звездчатое правильное
семиугольное замощение модели
Действует проективная линейная группа PGL (2, C ) на сфере Римана с помощью преобразований Мёбиуса. Подгруппа, отображающая верхнюю полуплоскость, H, на себя - это PSL (2, R ), преобразования с действительными коэффициентами, и они действуют транзитивно и изометрически на верхней полуплоскости, что делает его однородным пространством.
Существует четыре тесно связанных группы Ли, которые действуют в верхней полуплоскости посредством дробно-линейных преобразований и сохраняют гиперболическое расстояние.
- Специальная линейная группа SL (2, R), которая состоит из набора матриц 2 × 2 с действительными элементами, определитель которых равен +1. Обратите внимание, что многие тексты (включая Википедию) часто говорят SL (2, R ), когда на самом деле имеют в виду PSL (2, R).
- Группа S * L (2, R ), состоящая из набора матриц 2 × 2 с вещественными элементами, определитель которых равен +1 или -1. Обратите внимание, что SL (2, R ) является подгруппой этой группы.
- Проективная специальная линейная группа PSL (2, R) = SL (2, R ) / {± I}, состоящий из матриц в SL (2, R ) по модулю плюс или минус единичная матрица.
- Группа PSL (2, R ) = SL (2, R ) / {± I} = PGL (2, R ) снова является проективной группой, и опять же, по модулю плюс или минус единичная матрица. PSL (2, R ) содержится как нормальная подгруппа индекса два, другой смежный класс - это множество матриц 2 × 2 с действительными элементами, определитель которых равен −1 по модулю плюс или минус тождество.
Взаимосвязь этих групп модели Пуанкаре выглядит следующим образом:
- Группа всех изометрий из H, иногда обозначаемых как Isom (H ), изоморфна PSL ( 2, R ). Это включает в себя как изометрии с сохранением ориентации, так и изометрии с изменением ориентации. Карта с изменением ориентации (зеркальная карта):
 .
. - Группа сохраняющих ориентацию изометрий H, иногда обозначаемый как Isom (H ), изоморфен PSL (2, R).
Важными подгруппами группы изометрий являются фуксовы группы.
Также часто встречаются модульная группа SL (2, Z ). Эта группа важна по двум причинам. Во-первых, это группа симметрии квадратной 2x2 решетки точек. Таким образом, периодические функции на квадратной сетке, такие как модульные формы и эллиптические функции, таким образом, унаследуют симметрию SL (2, Z ) от сетки. Во-вторых, SL (2, Z ), конечно, является подгруппой SL (2, R ) и, таким образом, имеет заложенное в ней гиперболическое поведение. В частности, SL (2, Z ) можно использовать для разбиения гиперболической плоскости на ячейки с равной площадью (Пуанкаре).
Изометрическая симметрия
групповое действие проект тивная специальная линейная группа  на
на  определяется как
определяется как

Обратите внимание, что действие является транзитивным : для любого  существует a
существует a  такой, что
такой, что  . Он также верен в том смысле, что если
. Он также верен в том смысле, что если  для всех
для всех  , тогда g = e.
, тогда g = e.
стабилизатор или подгруппа изотропии элемента  - это набор , при этом z остается неизменным: gz = z. Стабилизатором i является группа вращения
- это набор , при этом z остается неизменным: gz = z. Стабилизатором i является группа вращения

Поскольку любой элемент отображается в i некоторым элементом , это означает что подгруппа изотропии любого z изоморфна SO (2). Таким образом,  . В качестве альтернативы, связка касательных векторов единичной длины на верхней полуплоскости, называемая единичной касательной связкой, изоморфна .
. В качестве альтернативы, связка касательных векторов единичной длины на верхней полуплоскости, называемая единичной касательной связкой, изоморфна .
Верхняя полуплоскость разбивается на свободные регулярные множества с помощью модульной группы 
Геодезические
Геодезические для этого метрического тензора представляют собой дуги окружностей, перпендикулярные действительной оси (полукруги, начало координат на действительной оси) и прямые вертикальные линии, заканчивающиеся на действительной оси.
Геодезическая с единичной скоростью, идущая вертикально вверх через точку i, задается как

Поскольку PSL (2, R ) действует транзитивно изометриями верхней полуплоскости, эта геодезическая отображается в другие геодезические посредством действия PSL (2, R ). Таким образом, общая геодезическая с единичной скоростью определяется как

Это дает базовое описание геодезический поток на касательном расслоении единичной длины (комплексное линейное расслоение ) на верхней полуплоскости. Начиная с этой модели, можно получить поток на произвольных римановых поверхностях, как описано в статье о потоке Аносова.
Модель в трех измерениях
The метрика модели на полупространстве

задается как

где s измеряет длину вдоль возможно искривленной линии. Прямые линии в гиперболическом пространстве (геодезические для этого метрического тензора, т.е. кривые, которые минимизируют расстояние) представлена в этой модели дугами окружностей, нормальными к плоскости z = 0 (полукруги, начало которых находится в плоскости z = 0), и прямыми вертикальными лучами, нормальными к плоскости z = 0.
расстояние между двумя точками, измеренными в этой метрике вдоль такой геодезической, составляет:

Модель в n измерениях
Эту модель можно обобщить для моделирования размерное гиперболическое пространство путем замены действительного числа x вектором в n-мерном евклидовом векторном пространстве.
См. Также
Ссылки
- Примечания
- Источники

 Параллельные лучи в модели полуплоскости Пуанкаре гиперболической геометрия
Параллельные лучи в модели полуплоскости Пуанкаре гиперболической геометрия  Звездчатое правильное семиугольное замощение модели
Звездчатое правильное семиугольное замощение модели