
Войти
 Художественная концепция спутника GPS Block II-F на околоземной орбите.
Художественная концепция спутника GPS Block II-F на околоземной орбите.  Гражданский GPS-приемник ("GPS-навигатор ") в морском приложении.
Гражданский GPS-приемник ("GPS-навигатор ") в морском приложении. Спутники глобальной системы позиционирования (GPS) передают микроволновые сигналы, чтобы приемники GPS на поверхности Земли или вблизи нее могли определять местоположение и время и для получения скорости. Система эксплуатируется США. Министерство обороны (DoD) для использования как военными, так и населением.
Сигналы GPS включают в себя сигналы дальности, используемые для измерения расстояния до спутника, и навигационные сообщения. Навигационные сообщения включают данные эфемерид, используемые для расчета положения каждого спутника на орбите, и информацию о времени и состоянии всей спутниковой группировки, называемую альманахом.
. Имеется четыре сигнала. доступны для гражданского использования. В порядке даты введения это: L1 C / A, L2C, L5и L1C. L1 C / A также называется устаревшим сигналом и транслируется всеми спутниками. Остальные сигналы называются модернизированными сигналами и передаются не всеми спутниками. Кроме того, существуют ограниченные сигналы с опубликованными частотами и чипами, но зашифрованное кодирование предназначено для использования только уполномоченными сторонами. Некоторое ограниченное использование ограниченных сигналов все еще может быть сделано гражданскими лицами без расшифровки; это называется бескодовым и полубескодовым доступом и официально поддерживается.
Интерфейс к пользовательскому сегменту (GPS-приемники ) описан в документах управления интерфейсом (ICD). Формат гражданских сигналов описан в Спецификации интерфейса (IS), которая является подмножеством ICD.
Спутники GPS (называемые космическими аппаратами в Документы спецификации интерфейса GPS) передают одновременно несколько кодов дальности и навигационные данные с использованием двоичной фазовой манипуляции (BPSK). Используется только ограниченное количество центральных частот; Спутники, использующие одну и ту же частоту, различаются с помощью разных кодов дальности; другими словами, GPS использует множественный доступ с кодовым разделением каналов. Коды ранжирования также называются чиповыми кодами (со ссылкой на CDMA / DSSS ), псевдослучайным шумом и псевдослучайными двоичными последовательностями (в связи с тем, что это предсказуемо, но статистически напоминает шум).
Некоторые спутники передают несколько потоков BPSK на одной и той же частоте в квадратуре в форме квадратурной амплитудной модуляции. Однако, в отличие от типичных систем QAM, где один битовый поток разделяется на два битовых потока с половинной скоростью передачи символов для повышения спектральной эффективности, в сигналах GPS синфазная и квадратурная составляющие модулируются отдельными (но функционально) связанные) битовые потоки.
Спутники однозначно идентифицируются по серийному номеру, называемому номером космического корабля (SVN), который не меняется в течение его срока службы. Кроме того, все работающие спутники пронумерованы идентификатором космического корабля (SV ID) и номером псевдослучайного шума (номер PRN), который однозначно идентифицирует коды дальности, используемые спутником. Существует фиксированное взаимно-однозначное соответствие между идентификаторами SV и номерами PRN, описанными в спецификации интерфейса. В отличие от SVN, номер SV ID / PRN спутника можно изменить (также изменив коды дальности, которые он использует). В любой момент времени любой номер SV ID / PRN используется не более чем одним спутником. Один номер SV ID / PRN мог использоваться несколькими спутниками в разные моменты времени, а один спутник мог использовать разные номера SV ID / PRN в разные моменты времени. Текущие номера SVN и PRN для созвездия GPS можно найти в NAVCEN.
Исходная конструкция GPS содержит два кода измерения дальности: код грубого / сбора данных (C / A), который является свободно доступным для общественности, и кодом ограниченной точности (P), обычно зарезервированным для военных приложений.
Коды C / A PRN - это коды Голда с периодом в 1023 чипа, передаваемые со скоростью 1,023 Mchip / s, в результате чего код повторяется каждые 1 миллисекунда. Они исключены с 50 бит / с навигационным сообщением, и фаза результата модулирует несущую, как ранее описано. Эти коды совпадают или строго автокоррелируют только тогда, когда они почти точно выровнены. Каждый спутник использует уникальный код PRN, который плохо коррелирует с кодом PRN любого другого спутника. Другими словами, коды PRN в высокой степени ортогональны друг другу. Период 1 мс кода C / A соответствует расстоянию 299,8 км, а каждый чип соответствует расстоянию 293 м. (Приемники отслеживают эти коды с точностью до одного чипа, поэтому ошибки измерения значительно меньше 293 м.)
Коды C / A генерируются путем объединения (с использованием «исключающего ИЛИ») сгенерированных 2-битных потоков. по максимальному периоду 10 каскад регистров сдвига с линейной обратной связью (LFSR). Различные коды получаются путем выборочной задержки одного из этих битовых потоков. Таким образом:
где:
Аргументы функций в нем - это количество битов или чипов с их эпох, начиная с 0. Эпоха LFSR - это точка, в которой они находятся в начальной состояние; и для общих кодов C / A это начало любой секунды UTC плюс любое целое число миллисекунд. Выход LFSR с отрицательными аргументами определяется в соответствии с периодом, равным 1023 элементам (это положение необходимо, потому что B может иметь отрицательный аргумент, используя приведенное выше уравнение uation).
Задержка для номеров PRN 34 и 37 одинакова; поэтому их коды C / A идентичны и не передаются одновременно (это может сделать один или оба этих сигнала непригодными для использования из-за взаимных помех в зависимости от относительных уровней мощности, принимаемых каждым приемником GPS).
P-код представляет собой последовательность PRN, намного более длинную, чем код C / A: 6,187104 · 10 чипов (773 388 МБ). Несмотря на то, что скорость чипа P-кода (10,23 Mchips / s) в десять раз выше, чем у кода C / A, он повторяется только один раз в неделю, что устраняет двусмысленность диапазона. Предполагалось, что приемники не могут напрямую получить такой длинный и быстрый код, поэтому они сначала «загрузят» себя с помощью кода C / A, чтобы получить космический корабль эфемерид, произвести приблизительное определение времени и местоположения и затем получите P-код для уточнения исправления.
В то время как PRN C / A уникальны для каждого спутника, каждый спутник передает отдельный сегмент последовательности главного P-кода длиной примерно 2,35 · 10 элементарных сигналов (235 000 000 000 000 бит, ~ 26,716 терабайт). Каждый спутник многократно передает назначенный ему сегмент главного кода, перезапускаясь каждое воскресенье в 00:00:00 по времени GPS. (Эпоха GPS была в воскресенье 6 января 1980 г. в 00:00:00 UTC, но GPS не отслеживает дополнительные секунды UTC. Таким образом, время GPS опережает UTC на целое число секунд.)
P код является общедоступным, поэтому для предотвращения использования или потенциального вмешательства неавторизованных пользователей с помощью спуфинга, P-код подвергается XOR-операции с W-кодом, криптографически сгенерированной последовательностью, для создания Y-кода. Y-код - это то, что передают спутники с тех пор, как модуль защиты от спуфинга был установлен в состояние «включено». Зашифрованный сигнал называется P (Y) -кодом.
Подробности W-кода засекречены, но известно, что он применяется к P-коду примерно на частоте 500 кГц, что примерно в 20 раз медленнее, чем скорость элементарных посылок P-кода. Это привело к полубескодовым подходам для отслеживания сигнала P (Y) без знания W-кода.
| Под-. кадр | Слово | Описание |
|---|---|---|
| 1 | 1–2 | Слова телеметрии и передачи обслуживания. (TLM и HOW) |
| 3–10 | Спутниковые часы,. взаимосвязь времени GPS | |
| 2–3 | 1–2 | Телеметрия и передача слова. (TLM и HOW) |
| 3–10 | Эфемериды. (точная спутниковая орбита) | |
| 4–5 | 1-2 | Слова телеметрии и передачи обслуживания. (TLM и HOW) |
| 3–10 | Компонент альманаха. (синопсис спутниковой сети,. исправление ошибок) |
В дополнение к дальности PRN коды, приемник должен знать время и положение каждого активного спутника. GPS кодирует эту информацию в навигационное сообщение и модулирует ее на коды дальности C / A и P (Y) со скоростью 50 бит / с. Формат навигационного сообщения, описанный в этом разделе, называется данными LNAV (для устаревшей навигации).
Навигационное сообщение содержит информацию трех типов:
Эфемериды действительны только в течение четырех часов; альманах действителен с небольшим снижением точности до двух недель. Приемник использует альманах для обнаружения набора спутников на основе сохраненного времени и местоположения. По мере захвата каждого спутника его эфемериды декодируются, чтобы спутник можно было использовать для навигации.
Навигационное сообщение состоит из 30-секундных кадров длиной 1500 бит, разделенных на пять 6-секундных субкадров по десять 30-битных слов каждый. Каждый подкадр имеет время GPS с шагом в 6 секунд. Подфрейм 1 содержит дату GPS (номер недели) и информацию о корректировке спутниковых часов, статус и состояние спутника. Подкадры 2 и 3 вместе содержат эфемеридные данные передающего спутника. Подкадры 4 и 5 содержат страницы с 1 по 25 25-страничного альманаха. Альманах состоит из 15 000 битов и занимает 12,5 минут на передачу.
Кадр начинается в начале недели GPS и каждые 30 секунд после этого. Каждая неделя начинается с передачи страницы 1 альманаха.
Существует два типа навигационных сообщений: LNAV-L используется спутниками с номерами PRN от 1 до 32 (называемыми нижними номерами PRN), а LNAV-U используется спутники с номерами PRN от 33 до 63 (называемые верхними номерами PRN). Эти 2 типа используют очень похожие форматы. Подкадры 1–3 одинаковы, а подкадры 4 и 5 почти одинаковы. Каждый тип сообщения содержит данные альманаха для всех спутников, использующих один и тот же тип навигационного сообщения, но не другой.
Каждый субкадр начинается со слова телеметрии (TLM), которое позволяет приемнику обнаруживать начало субкадра и определять тактовое время приемника, в которое начинается навигационный субкадр. Далее идет слово передачи обслуживания (HOW), дающее время GPS (фактически время, когда будет передан первый бит следующего субкадра) и идентифицирующее конкретный субкадр в полном кадре. Остальные восемь слов подкадра содержат фактические данные, специфичные для этого подкадра. Каждое слово включает в себя 6 битов четности, сгенерированных с использованием алгоритма, основанного на кодах Хэмминга, которые учитывают 24 бита без четности этого слова и последние 2 бита предыдущего слова.
После того, как подкадр был считан и интерпретирован, время отправки следующего подкадра может быть вычислено с использованием данных коррекции часов и HOW. Приемник знает время часов приемника, когда было получено начало следующего подкадра, из обнаружения слова телеметрии, что позволяет вычислить время прохождения и, следовательно, псевдодальность.
Время GPS выражается с разрешением 1,5 секунды в виде номера недели и счетчика времени недели (TOW). Его нулевая точка (неделя 0, TOW 0) определена как 1980-01-06T00: 00Z. Счетчик TOW - это значение в диапазоне от 0 до 403199, значение которого представляет собой количество периодов в 1,5 секунды, прошедших с начала недели GPS. Таким образом, для выражения TOW count требуется 19 бит (2 = 524 288). Время GPS - это непрерывная шкала времени, поскольку она не включает дополнительные секунды; поэтому начало / конец недель GPS может отличаться от соответствующего дня UTC на целое число секунд.
В каждом субкадре каждое слово передачи обслуживания (HOW) содержит 17 старших битов счетчика TOW, соответствующего началу следующего следующего субкадра. Обратите внимание, что 2 младших бита можно безопасно опустить, потому что один HOW появляется в навигационном сообщении каждые 6 секунд, что равно разрешающей способности его усеченного счетчика TOW. Эквивалентно, усеченный счетчик TOW - это продолжительность времени с начала / конца последней недели GPS до начала следующего кадра в единицах по 6 секунд.
Каждый кадр содержит (в подкадре 1) 10 младших битов соответствующего номера недели GPS. Обратите внимание, что каждый кадр полностью находится в пределах одной недели GPS, потому что кадры GPS не пересекают границы недели GPS. Поскольку перенос происходит каждые 1024 недели GPS (примерно каждые 19,6 года; 1024 = 2), приемник, вычисляющий текущие календарные даты, должен вывести биты номера верхней недели или получить их из другого источника. Один из возможных способов - сохранить текущую дату в памяти приемника при выключении, а при включении предположить, что вновь декодированный усеченный номер недели соответствует периоду в 1024 недели, который начинается с последней сохраненной даты. Этот метод правильно определяет полный номер недели, если приемник никогда не может оставаться выключенным (или без определения времени и местоположения) более 1024 недель (~ 19,6 лет).
Альманах состоит из приблизительной информации об орбите и состоянии для каждого спутника в группировке, ионосферной модели и информации, связывающей время, полученное с помощью GPS, с Всемирное координированное время (UTC). Каждый кадр содержит часть альманаха (в подкадрах 4 и 5), а полный альманах передается каждым спутником всего в 25 кадрах (что занимает 12,5 минут). Альманах служит нескольким целям. Первый - помочь в обнаружении спутников при включении питания, позволяя приемнику генерировать список видимых спутников на основе сохраненных местоположения и времени, в то время как эфемериды от каждого спутника необходимы для вычисления определения местоположения с использованием этого спутника. В старом оборудовании отсутствие альманаха в новом приемнике приводило к длительным задержкам перед предоставлением действительного местоположения, поскольку поиск каждого спутника был медленным процессом. Достижения в области аппаратного обеспечения значительно ускорили процесс приобретения, поэтому отсутствие альманаха больше не является проблемой. Вторая цель - связать время, полученное с помощью GPS (называемое временем GPS), с международным стандартом времени UTC. Наконец, альманах позволяет одночастотному приемнику корректировать ошибку ионосферной задержки с помощью глобальной модели ионосферы. Поправки не так точны, как системы дополнения GNSS, такие как WAAS или двухчастотные приемники. Однако это часто лучше, чем отсутствие коррекции, поскольку ионосферная ошибка является самым большим источником ошибок для одночастотного приемника GPS.
|
|
Спутниковые данные обычно обновляются каждые 24 часа, при этом загружаются данные за 60 дней в случае нарушения возможности обновления регулярно. Обычно обновления содержат новые эфемериды, а новые альманахи загружаются реже. Контрольный сегмент гарантирует, что во время нормальной работы новый альманах будет загружаться не реже, чем каждые 6 дней.
Спутники транслируют новые эфемериды каждые два часа. Эфемериды обычно действительны в течение 4 часов, с возможностью обновления каждые 4 часа или дольше в нестандартных условиях. Время, необходимое для получения эфемерид, становится важным элементом задержки до первого определения местоположения, потому что по мере того, как аппаратное обеспечение приемника становится более способным, время захвата спутниковых сигналов сокращается; однако эфемеридным данным требуется от 18 до 36 секунд, прежде чем они будут получены из-за низкой скорости передачи данных.
 GPS широковещательный сигнал.
GPS широковещательный сигнал.Чтобы коды дальности и навигационное сообщение передавались от спутника к приемнику, они должны быть модулированы на несущая. В случае оригинальной конструкции GPS используются две частоты; один на 1575,42 МГц (10,23 × 154 МГц), называемый L1; и второй на 1227,60 МГц (10,23 МГц × 120), называемый L2.
Код C / A передается на частоте L1 как сигнал 1,023 МГц с использованием метода модуляции с двухфазной манипуляцией (BPSK ). Код P (Y) передается на частотах L1 и L2 как сигнал 10,23 МГц с использованием той же модуляции BPSK, однако несущая кода P (Y) находится в квадратуре с C / A несущая (это означает, что она отклонена на 90 ° от фазы фазы ).
Помимо избыточности и повышенной устойчивости к помехам, критическим преимуществом передачи двух частот с одного спутника является возможность прямого измерения и, следовательно, устранения ошибки ионосферной задержки для этого спутника. Без такого измерения приемник GPS должен использовать общую модель или получать ионосферные поправки от другого источника (например, Wide Area Augmentation System или WAAS ). Достижения в технологии, используемой как на спутниках GPS, так и на приемниках GPS, сделали задержку в ионосфере самым большим остающимся источником ошибок в сигнале. Приемник, способный выполнять это измерение, может быть значительно более точным и обычно называется двухчастотным приемником.
Достигнув полной работоспособности 17 июля 1995 г., система GPS выполнила свои первоначальные проектные задачи. Однако дополнительные достижения в технологии и новые требования к существующей системе привели к попыткам «модернизировать» систему GPS. Объявления вице-президента и Белого дома в 1998 году возвестили о начале этих изменений, а в 2000 году Конгресс США подтвердил усилия, получившие название GPS III.
Проект включает новые наземные станции и новые спутники с дополнительными навигационными сигналами как для гражданских, так и для военных пользователей и направлен на повышение точности и доступности для всех пользователей. Была поставлена цель на 2013 год с предложением стимулов для подрядчиков, если они смогут завершить ее к 2011 году.
 Наглядный пример движения группировки GPS и вращения Земли. Обратите внимание на то, как количество спутников, находящихся в поле зрения из данной точки на поверхности Земли, в этом примере на 45 ° с.ш., изменяется со временем.
Наглядный пример движения группировки GPS и вращения Земли. Обратите внимание на то, как количество спутников, находящихся в поле зрения из данной точки на поверхности Земли, в этом примере на 45 ° с.ш., изменяется со временем. Модернизированные гражданские сигналы GPS имеют два общих улучшения по сравнению с прежними аналогами: средство сбора данных без данных и прямое исправление ошибок (FEC) кодирование сообщения NAV.
Средство сбора данных без данных - это дополнительный сигнал, в некоторых случаях называемый пилотной несущей, транслируемый вместе с сигналом данных. Этот сигнал без данных разработан таким образом, чтобы его было легче получить, чем закодированные данные, и после успешного сбора данных его можно использовать для получения сигнала данных. Этот метод улучшает получение сигнала GPS и увеличивает уровни мощности на корреляторе.
Второе усовершенствование заключается в использовании кодирования прямого исправления ошибок (FEC) в самом сообщении NAV. Из-за относительно низкой скорости передачи данных NAV (обычно 50 бит в секунду) небольшие прерывания могут иметь потенциально большие последствия. Следовательно, FEC в сообщении NAV является значительным улучшением общей устойчивости сигнала.
Одним из первых объявлений было добавление нового сигнала гражданского использования, который должен передаваться на частоте, отличной от частоты L1, используемой для грубого / сбора данных (C / A) сигнал. В конечном итоге это стал сигналом L2C, названным так потому, что он транслируется на частоте L2. Поскольку для этого требуется новое оборудование на борту спутника, его передают только так называемые спутники Block IIR-M и более поздние модели. Сигнал L2C предназначен для повышения точности навигации, обеспечения легкости отслеживания сигнала и действия в качестве избыточного сигнала в случае локальных помех.
В отличие от кода C / A, L2C содержит две отдельные кодовые последовательности PRN для предоставления информации о ранжировании; гражданский кодекс средней длины (называемый CM) и гражданский код длинной длины (называемый CL). Код CM имеет длину 10230 бит и повторяется каждые 20 мс. Код CL имеет длину 767 250 бит и повторяется каждые 1500 мс. Каждый сигнал передается со скоростью 511 500 бит в секунду (бит / с ); однако они мультиплексируются вместе, чтобы сформировать сигнал 1,023,000 бит / с.
CM модулируется с помощью навигационного сообщения CNAV (см. Ниже), тогда как CL не содержит никаких модулированных данных и называется последовательностью без данных. Длинная последовательность без данных обеспечивает примерно на 24 дБ большую корреляцию (примерно в 250 раз сильнее), чем L1 C / A-код.
По сравнению с сигналом C / A, L2C имеет на 2,7 дБ больше восстановления данных и на 0,7 дБ больше слежения за несущей, хотя его мощность передачи на 2,3 дБ слабее.
Коды гражданского-среднего и гражданского-длительного диапазона генерируются модульным LFSR, который периодически сбрасывается в заранее определенное начальное состояние. Период CM и CL определяется этим сбросом, а не естественным периодом LFSR (как в случае с кодом C / A). Начальные состояния обозначены в спецификации интерфейса и различаются для разных номеров PRN и для CM / CL. Полином / маска обратной связи одинаковы для CM и CL. Коды дальности, таким образом, задаются следующим образом:
где:
 .
.Начальные состояния описаны в спецификации интерфейса GPS в виде чисел, выраженных в восьмеричный, следуя соглашению о том, что состояние LFSR интерпретируется как двоичное представление числа, где выход бит put - это самый младший бит, а бит, в который смещаются новые биты, - самый старший бит. Используя это соглашение, LFSR переходит от наиболее значимого бита к наименее значимому, а при просмотре в обратном порядке, он смещается вправо. Состояния, называемые конечным состоянием в IS, достигаются после 10229 циклов для CM и после 767249 циклов для LM (непосредственно перед сбросом в обоих случаях).
Битовая маска обратной связи: 100100101001001010100111100 2. Опять же, согласно соглашению, что наименее значимый бит является выходным битом LFSR, а наиболее значимый бит - битом сдвига LFSR, 0 означает отсутствие обратной связи в этой позиции, а 1 означает обратную связь в этой позиции.
| Биты | Информация |
|---|---|
| 1–8 | Преамбула |
| 9– 14 | PRN передающего спутника |
| 15–20 | ID типа сообщения |
| 21–37 | Усеченное количество TOW |
| 38 | Флаг предупреждения |
| 277 –300 | Циклическая проверка избыточности |
| ID типа | Описание |
|---|---|
| 10–11 | Эфемериды и работоспособность |
| 12, 31, 37 | Параметры альманаха |
| 13–14, 34 | Дифференциальная коррекция |
| 15, 36 | Текстовые сообщения |
| 30 | Коррекция ионосферной и групповой задержки |
| 32 | Параметры ориентации Земли |
| 33 | Параметры UTC |
| 35 | Смещение времени GPS / GNSS |
Данные CNAV представляют собой обновленную версию исходного навигационного сообщения NAV. Он содержит более точное представление и номинально более точные данные, чем данные NAV. Тот же тип информации (время, статус, эфемериды и альманах) по-прежнему передается с использованием нового формата CNAV; однако вместо использования архитектуры кадра / подкадра он использует новый псевдопакетированный формат, состоящий из 12-секундных 300-битных сообщений, аналогичных кадрам LNAV. В то время как кадры LNAV имеют фиксированное информационное содержание, сообщения CNAV могут быть одного из нескольких определенных типов. Тип кадра определяет его информационное наполнение. Сообщения не следуют фиксированному расписанию в отношении того, какие типы сообщений будут использоваться, что обеспечивает некоторую гибкость контрольного сегмента. Однако для некоторых типов сообщений существуют нижние границы того, как часто они будут передаваться.
В CNAV, по крайней мере, 1 из каждых 4 пакетов является эфемеридными данными, и та же самая нижняя граница применяется для пакетов данных часов. Конструкция позволяет передавать самые разные типы пакетов. При созвездии из 32 спутников и текущих требованиях к тому, что необходимо отправлять, используется менее 75% полосы пропускания. Определена лишь небольшая часть доступных типов пакетов; это позволяет системе расти и внедрять усовершенствования без нарушения совместимости.
В новом сообщении CNAV есть много важных изменений:
Сообщения CNAV начинаются и конец в начале / конце недели GPS плюс целое число, кратное 12 секундам. В частности, начало первого бита (с уже примененным кодированием свертки), содержащего информацию о сообщении, соответствует вышеупомянутой синхронизации. Сообщения CNAV начинаются с 8-битной преамбулы, которая является фиксированным битовым шаблоном и предназначена для того, чтобы получатель мог обнаружить начало сообщения.
Сверточный код , используемый для кодирования CNAV, описывается следующим образом:

где:
 и
и  - неупорядоченные выходные данные сверточного кодировщика;
- неупорядоченные выходные данные сверточного кодировщика; - необработанные (не кодированные FEC) данные навигации, состоящий из простой конкатенации 300-битные сообщения.
- необработанные (не кодированные FEC) данные навигации, состоящий из простой конкатенации 300-битные сообщения. - это целое число битов навигационных данных без кодирования FEC, прошедших с произвольного момента времени (начиная с 0).
- это целое число битов навигационных данных без кодирования FEC, прошедших с произвольного момента времени (начиная с 0). - данные навигации, закодированные с помощью FEC.
- данные навигации, закодированные с помощью FEC. - целое число битов данных навигации, закодированных с помощью FEC, прошедших с той же эпохи. чем (также начиная с 0).
- целое число битов данных навигации, закодированных с помощью FEC, прошедших с той же эпохи. чем (также начиная с 0).Поскольку битовый поток, закодированный с помощью FEC, работает в 2 раза быстрее, чем бит без кодирования FEC, как уже описано, то 
Непосредственным эффектом передачи двух гражданских частот является то, что гражданские приемники теперь могут напрямую измерять ионосферную ошибку так же, как приемники с двухчастотным P (Y) -кодом. Однако пользователи, использующие только сигнал L2C, могут ожидать на 65% большей неопределенности местоположения из-за ионосферной ошибки, чем с одним сигналом L1.
Главный компонент Процесс модернизации - это новый военный сигнал. Названный военным кодом или М-кодом, он был разработан для дальнейшего улучшения защиты от помех и безопасного доступа военных сигналов GPS.
Очень мало опубликовано об этом новом ограниченном коде. Он содержит код PRN неизвестной длины, передаваемый на частоте 5,115 МГц. В отличие от P (Y) -кода, M-код разработан как автономный, что означает, что пользователь может вычислить свое положение, используя только сигнал M-кода. Исходя из оригинального дизайна P (Y) -кода, пользователи должны были сначала заблокировать код C / A, а затем перенести блокировку на P (Y) -код. Позже были разработаны методы прямого захвата, которые позволили некоторым пользователям работать автономно с P (Y) -кодом.
Немного больше известно о новом навигационном сообщении, которое называется MNAV. Подобно новому CNAV, этот новый MNAV пакетируется, а не кадрируется, что обеспечивает очень гибкую полезную нагрузку данных. Также, как и CNAV, он может использовать прямое исправление ошибок (FEC) и расширенное обнаружение ошибок (например, CRC ).
M-код передается на тех же частотах L1 и L2, которые уже использовались предыдущим военным кодом, P (Y) -кодом. Новый сигнал формируется так, чтобы большая часть его энергии размещалась на краях (вдали от существующих носителей P (Y) и C / A).
В отличие от предыдущих разработок GPS, M-код предназначен для широковещательной передачи от направленной антенны с большим усилением в дополнение к наземной антенне. Сигнал этой направленной антенны, называемый точечным лучом, предназначен для нацеливания на конкретную область (несколько сотен километров в диаметре) и увеличения силы местного сигнала на 20 дБ или примерно в 100 раз сильнее. Побочным эффектом наличия двух антенн является то, что спутник GPS будет выглядеть как два спутника GPS, занимающих то же положение, что и те, которые находятся внутри сфокусированного луча. Хотя весь земной сигнал M-кода доступен на спутниках Block IIR-M, точечные антенны не будут развернуты до тех пор, пока спутники Block III не будут развернуты, что началось в декабре 2018 года.
Интересным побочным эффектом того, что каждый спутник передает четыре отдельных сигнала, является то, что MNAV потенциально может передавать четыре разных канала данных, предлагая увеличенную полосу пропускания данных.
Метод модуляции - двоичная смещенная несущая с использованием поднесущей 10,23 МГц против кода 5,115 МГц. Этот сигнал будет иметь общую полосу пропускания примерно 24 МГц со значительным разделением лепестков боковой полосы. Боковые полосы можно использовать для улучшения приема сигнала.
Сигнал L5 обеспечивает безопасное и надежное средство радионавигации для критически важных для жизни приложений, таких как наведение для точного захода на посадку. Сигнал транслируется в полосе частот, защищенной ITU для служб воздушной радионавигации. Впервые он был продемонстрирован со спутника USA-203 (Block IIR-M) и доступен на всех спутниках GPS IIF. Полоса L5 обеспечивает дополнительную устойчивость в виде уменьшения помех, причем эта полоса является международной. y защищен, резервирование с существующими полосами, геостационарное спутниковое расширение и наземное расширение. Дополнительная устойчивость этой полосы также приносит пользу наземным приложениям.
Два кода дальности PRN передаются на L5 в квадратуре: синфазный код (называемый I5-кодом) и квадратурно-фазовый код (называемый Q5-кодом). Оба кода имеют длину 10230 бит, передаются на частоте 10,23 МГц (период повторения 1 мс) и генерируются одинаково (отличаются только начальными состояниями). Затем I5 модулируется (с помощью исключающего ИЛИ) навигационными данными (называемыми L5 CNAV) и 10-битным тактовым сигналом с частотой 1 кГц. Аналогичным образом модулируется код Q5, но только 20-битным кодом Неймана-Хофмана, который также синхронизируется с частотой 1 кГц.
По сравнению с L1 C / A и L2, вот некоторые из изменений в L5:
I5- code и Q5-code генерируются с использованием одной и той же структуры, но с разными параметрами. Эти коды представляют собой комбинацию (по принципу «исключающее ИЛИ») выходных сигналов 2 различных регистров сдвига с линейной обратной связью (LFSR), которые выборочно сбрасываются.
где:
A и B являются LFSR максимальной длины. Операции по модулю соответствуют сбросам. Обратите внимание, что оба значения сбрасываются каждую миллисекунду (синхронизировано с кодом C / A эпох). Кроме того, дополнительная операция по модулю в описании A связана с тем, что она сбрасывается за 1 цикл до своего естественного периода (который равен 8191), так что следующее повторение становится смещенным на 1 цикл относительно B (в противном случае, поскольку оба последовательности будут повторяться, I5 и Q5 также будут повторяться в течение любого периода 1 мс, ухудшая характеристики корреляции).
Данные CNAV L5 включают эфемериды SV, системное время, данные о поведении часов SV, сообщения о состоянии и информацию о времени и т. Д. Данные 50 бит / с кодируются со скоростью Кодер 1/2 свертки. Результирующий поток символов из 100 символов в секунду (sps) добавляется по модулю 2 только к I5-коду; Результирующая последовательность битов используется для модуляции синфазной несущей L5 (I5). Этот комбинированный сигнал называется сигналом данных L5. Несущая с квадратурной фазой (Q5) L5 не имеет данных и называется пилот-сигналом L5. Формат, используемый для L5 CNAV, очень похож на формат L2 CNAV. Одно отличие состоит в том, что он использует в 2 раза большую скорость передачи данных. Битовые поля в каждом сообщении, типах сообщений и алгоритме кода прямого исправления ошибок такие же, как и в L2 CNAV. Сообщения L5 CNAV начинаются и заканчиваются в начале / конце недели GPS плюс целое число, кратное 6 секундам (это относится к началу первого бита, содержащего информацию о сообщении, как в случае L2 CNAV).
Вещание на частоте L5 (1176,45 МГц, 10,23 МГц × 115), которая является диапазоном авиационной навигации. Частота была выбрана таким образом, чтобы авиационное сообщество могло управлять помехами L5 более эффективно, чем L2.
L1C - сигнал гражданского использования, который будет транслироваться на частоте L1 (1575,42 МГц), который содержит сигнал C / A, используемый всеми текущими пользователями GPS. L1C будет доступен с первым запуском блока III, ориентировочно намеченным на первую половину 2017 финансового года.
L1C состоит из пилотного (называемого L1C P) и данных (называемого L1C D) компонент. Эти компоненты используют несущие с одинаковой фазой (с погрешностью 100 миллирадиан ) вместо несущих в квадратуре, как в L5. Коды PRN имеют длину 10230 бит и передаются со скоростью 1,023 Мбит / с. Компонент пилот-сигнала также модулируется оверлейным кодом, называемым L1C O (вторичный код, который имеет более низкую скорость, чем код ранжирования, и также предварительно определен, как код ранжирования). Из общей мощности сигнала L1C 25% выделяется для данных и 75% - для пилот-сигнала. Используемый метод модуляции - BOC (1,1) для сигнала данных и TMBOC для пилот-сигнала. Время мультиплексированной двоичной несущей смещения (TMBOC) равно BOC (1,1) для всех, кроме 4 из 33 циклов, когда он переключается на BOC (6,1).
Пилотный код L1C и коды дальности данных основаны на последовательности Лежандра длиной 10223, используемый для построения промежуточного кода (называемого кодом Вейля), который расширяется фиксированной 7-битной последовательностью до требуемых 10230 бит. Эта 10230-битная последовательность является кодом ранжирования и варьируется между номерами PRN и между пилотным сигналом и компонентами данных. Коды дальности описываются следующим образом:
где:
 - это код ранжирования для номера PRN и компонента .
- это код ранжирования для номера PRN и компонента . представляет период ; он введен только для более четкого обозначения. Чтобы получить прямую формулу для
представляет период ; он введен только для более четкого обозначения. Чтобы получить прямую формулу для  , начните с правой части формулы для
, начните с правой части формулы для  и замените все экземпляры на
и замените все экземпляры на  .- целое число периодов микросхемы L1C (что составляет ⁄ 1,023 мкс) с момента начала отсчета времени GPS. или эквивалентно, поскольку любая секунда GPS (начиная с 0).- это упорядоченная пара, идентифицирующая номер PRN и код (L1C P или L1C D) и имеет форму
.- целое число периодов микросхемы L1C (что составляет ⁄ 1,023 мкс) с момента начала отсчета времени GPS. или эквивалентно, поскольку любая секунда GPS (начиная с 0).- это упорядоченная пара, идентифицирующая номер PRN и код (L1C P или L1C D) и имеет форму  или
или  , где
, где  - это PRN номер спутника, а
- это PRN номер спутника, а  - символы (не переменные), которые указывают L1C Код P или код L1C D соответственно ly.
- символы (не переменные), которые указывают L1C Код P или код L1C D соответственно ly. - это промежуточный код: последовательность Лежандра, домен которой представляет собой набор целых чисел для которого
- это промежуточный код: последовательность Лежандра, домен которой представляет собой набор целых чисел для которого  .
. является промежуточным код, называемый кодом Вейля, с тем же доменом, что и .
является промежуточным код, называемый кодом Вейля, с тем же доменом, что и . , представляет собой 7-битную последовательность, определенную для на основе 0 индексы от 0 до 6.
, представляет собой 7-битную последовательность, определенную для на основе 0 индексы от 0 до 6. - это отсчитываемый от 0 индекс вставки последовательности в код ранжирования (специфичный для номера PRN и кода ). Он определен в Спецификации интерфейса (IS) как индекс, отсчитываемый от 1
- это отсчитываемый от 0 индекс вставки последовательности в код ранжирования (специфичный для номера PRN и кода ). Он определен в Спецификации интерфейса (IS) как индекс, отсчитываемый от 1  , поэтому
, поэтому  .
. - индекс Вейля для номера PRN и кода , обозначенное в IS.
- индекс Вейля для номера PRN и кода , обозначенное в IS. - это остаток от операции деления (или по модулю), который отличается от обозначений в операторах модульной конгруэнтности, также используется в этой статье.
- это остаток от операции деления (или по модулю), который отличается от обозначений в операторах модульной конгруэнтности, также используется в этой статье.Согласно приведенной выше формуле и GPS IS, первые
ИБ утверждает, что 
, что приведет к вставке экземпляра
Длина оверлейных кодов составляет 1800 бит. и передается со скоростью 100 бит / с, синхронизируется с навигационным сообщением, закодированным в L1C D.
Для номеров PRN от 1 до 63 они являются усеченными выходными сигналами LFSR с максимальным периодом, которые различаются по начальным условиям и полиномам обратной связи.
Для номеров PRN от 64 до 210 они представляют собой усеченные коды Голда, сгенерированные путем объединения 2 выходных данных LFSR (

| Подкадры | Количество битов | Описание | |
|---|---|---|---|
| Сырье | Закодировано | ||
| 1 | 9 | 52 | Время интервала (TOI) |
| 2 | 576 | 1,200 | Временная коррекция и. эфемеридные данные |
| 3 | 250 | 548 | Переменные данные |
| Страница № | Описание |
|---|---|
| 1 | UTC и IONO |
| 2 | GGTO и EOP |
| 3 | Сокращенный альманах |
| 4 | Midi альманах |
| 5 | Дифференциальная коррекция |
| 6 | Текст |
Данные навигации L1C (называемые CNAV -2) транслируется в кадрах длиной 1800 бит (включая FEC) и передается со скоростью 100 бит / с.
Кадры L1C аналогичны сообщениям L2C и L5. Хотя L2 CNAV и L5 CNAV используют специальный тип сообщения для эфемеридных данных, все кадры CNAV-2 включают эту информацию.
Общая структура всех сообщений состоит из 3 кадров, как указано в таблице рядом. Содержимое подкадра 3 изменяется в соответствии с номером его страницы, который аналогичен номеру типа сообщений L2 CNAV и L5 CNAV. Страницы транслируются в произвольном порядке.
Время сообщений (не путать с параметрами коррекции часов) выражается в формате, отличном от формата предыдущих гражданских сигналов. Вместо этого он состоит из трех компонентов:
TOI - единственное содержимое подкадра 1. Номер недели и ITOW содержатся в подкадре 2 вместе с другой информацией.
Подкадр 1 кодируется модифицированным кодом BCH. В частности, 8 младших значащих битов кодируются BCH для генерации 51 бита, затем объединяются с использованием исключающего или со старшим значащим битом, и, наконец, самый старший бит добавляется как самый старший бит предыдущего результата для получения последние 52 бита. Подкадры 2 и 3 индивидуально расширяются 24-битным CRC, затем индивидуально кодируются с использованием кода проверки четности с низкой плотностью, а затем чередуются как одиночный блок с блочным перемежителем.
| Диапазон | Частота. (МГц) | Фаза | Первоначальное использование | Модернизированное использование |
|---|---|---|---|---|
| L1 | 1575,42. (10,23 × 154) | I | Зашифрованный прецизионный P (Y) код | |
| Q | Код грубого / сбора данных (C / A) | C / A, L1 Гражданский (L1C) и. Военный (M) код | ||
| L2 | 1227,60. (10,23 × 120) | I | Шифрованный прецизионный код P (Y) | |
| Q | немодулированная несущая | Гражданский код L2 (L2C) и. Военный код (M) | ||
| L3 | 1381.05. (10,23 × 135) | , используемые системой обнаружения ядерной детонации. (NUDET). Полезная нагрузка ( NDS):. сигнализирует о ядерных взрывах /. событиях в инфракрасном диапазоне высокой энергии.. Используется для обеспечения соблюдения договоров о запрещении ядерных испытаний.. | ||
| L4 | 1379.9133.... (10,23 × 1214/9) | N/A | изучается для дополнительных. ионосферная поправка | |
| L5 | 1176,45. (10,23 × 115) | I | Н / Д | Сигнал данных о безопасности жизни (SoL) |
| Q | Пилот по безопасности жизни (SoL) signal | |||
Все спутники вещают на одних и тех же двух частотах: 1,57542 ГГц (сигнал L1) и 1,2276 ГГц (сигнал L2). Спутниковая сеть использует метод расширения спектра CDMA, при котором данные сообщения с низкой скоростью передачи данных кодируются высокоскоростной последовательностью псевдослучайного шума (PRN), которая различна для каждого спутника. Приемник должен знать коды PRN для каждого спутника, чтобы восстановить фактические данные сообщения. Код C / A для гражданского использования передает данные со скоростью 1,023 миллиона чипов в секунду, тогда как P-код для использования в военных целях США передает со скоростью 10,23 миллиона чипов в секунду. Несущая L1 модулируется кодами C / A и P, в то время как несущая L2 модулируется только кодом P. Код P может быть зашифрован как так называемый код P (Y), который доступен только для военной техники с надлежащим ключом дешифрования. Оба кода C / A и P (Y) сообщают пользователю точное время дня.
Каждый составной сигнал (синфазный и квадратурный) принимает следующий вид:

где 




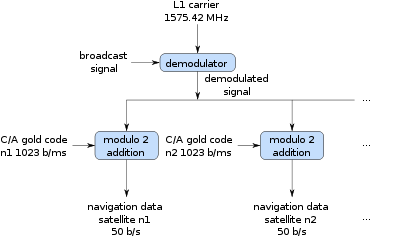 Демодуляция и декодирование спутниковых сигналов GPS с использованием кода Голда Голда.
Демодуляция и декодирование спутниковых сигналов GPS с использованием кода Голда Голда.Приемник GPS обрабатывает сигналы GPS, принятые на его антенну, для определения положения, скорости и / или времени. Сигнал на антенне усиливается, преобразуется с понижением частоты до основной полосы или промежуточной частоты, фильтруется (для удаления частот, выходящих за пределы намеченного диапазона частот для цифрового сигнала, который может быть наложен на него) и оцифровывается; эти шаги могут быть связаны в другом порядке. Обратите внимание, что наложение спектров иногда является преднамеренным (в частности, когда используется недостаточная выборка ), но фильтрация по-прежнему требуется, чтобы отбросить частоты, не предназначенные для присутствия в цифровом представлении.
Для каждого спутника, используемого приемником, приемник должен сначала получить сигнал, а затем отслеживать его, пока этот спутник используется; обе выполняются в цифровой области в большинстве (если не во всех) приемниках.
Получение сигнала - это процесс определения частоты и фазы кода (оба относительно времени приемника), когда они были ранее неизвестны. Кодовая фаза должна определяться с точностью, которая зависит от конструкции приемника (особенно контура слежения); Примерное значение - 0,5 длительности кодовых чипов (приблизительно 0,489 мкс).
Отслеживание - это процесс непрерывной регулировки расчетной частоты и фазы для максимального соответствия принятому сигналу, и, следовательно, это контур фазовой автоподстройки частоты. Обратите внимание, что захват выполняется для начала использования определенного спутника, но отслеживание выполняется, пока этот спутник используется.
В этом разделе описывается одна возможная процедура для сбора и отслеживания L1 C / A, но процесс очень похож для других сигналов. Описанная процедура основана на вычислении корреляции принятого сигнала с локально сгенерированной копией кода ранжирования и обнаружении самого высокого пика или самого низкого провала. Смещение самого высокого пика или самой низкой впадины содержит информацию о фазе кода относительно времени приемника. Продолжительность локальной реплики устанавливается конструкцией приемника и обычно меньше длительности битов навигационных данных, которая составляет 20 мс.
Получение данного номера PRN может быть концептуализировано как поиск сигнала в двумерном пространстве поиска, где измерениями являются (1) фаза кода, (2) частота. Кроме того, получатель может не знать, какой номер PRN искать, и в этом случае к пространству поиска добавляется третье измерение: (3) номер PRN.
. Если информация альманаха была получена ранее, приемник выбирает, какие спутники слушать по их PRN. Если информации альманаха нет в памяти, приемник переходит в режим поиска и циклически перебирает номера PRN до тех пор, пока на одном из спутников не будет получена блокировка. Для обеспечения захвата необходимо, чтобы приемник был беспрепятственно виден со спутника. Затем приемник может декодировать альманах и определить спутники, которые он должен слушать. Когда он обнаруживает сигнал каждого спутника, он идентифицирует его по отдельному шаблону кода C / A.
Самый простой способ получить сигнал (не обязательно самый эффективный или наименее затратный в вычислительном отношении) - это вычислить скалярное произведение окна оцифрованного сигнал с набором локально сгенерированных реплик. Локально сгенерированные реплики различаются по несущей частоте и фазе кода, чтобы охватить все уже упомянутое пространство поиска, которое представляет собой декартово произведение пространства поиска частоты и пространства поиска фазы кода. Несущая - это комплексное число, в котором действительная и мнимая составляющие являются синусоидами, как описано в формуле Эйлера. Реплика, которая генерирует наибольшую величину скалярного произведения, вероятно, является той, которая лучше всего соответствует фазе кода и частоте сигнала; поэтому, если эта величина превышает пороговое значение, приемник переходит к отслеживанию сигнала или дальнейшему уточнению оцененных параметров перед отслеживанием. Порог используется для минимизации ложных срабатываний (очевидно, обнаружение сигнала, когда на самом деле сигнала нет), но некоторые из них все же могут иногда возникать.
Использование комплексной несущей позволяет репликам согласовывать оцифрованный сигнал независимо от фазы несущей сигнала и обнаруживать эту фазу (принцип тот же, что и для преобразования Фурье ). Скалярное произведение - это комплексное число; его величина представляет собой уровень сходства между репликой и сигналом, как и в случае обычной корреляции реальных временных рядов. Аргумент скалярного произведения является приближением соответствующей несущей в оцифрованном сигнале.
В качестве примера предположим, что степень детализации поиска по фазе кода составляет 0,5 чипа, а по частоте - 500 Гц, тогда имеется 1,023 / 0,5 = 2,046 фаз кода и 10 000 Гц / 500 Гц = 20 частот, чтобы получить в общей сложности 20 × 2046 = 40 920 локальных реплик . Обратите внимание, что каждый элемент разрешения по частоте центрируется на своем интервале и поэтому покрывает 250 Гц в каждом направлении; например, первая ячейка имеет несущую на -4,750 Гц и охватывает интервал от -5000 Гц до -4 500 Гц. Фазы кода эквивалентны по модулю 1023, потому что код дальности периодический; например, фаза -0,5 эквивалентна фазе 1022,5.
В следующей таблице показаны локальные реплики, которые будут сравниваться с цифровым сигналом в этом примере. «•» означает одну локальную реплику, в то время как «...» используется для исключенных локальных реплик:
| Несущая частота. отклонение | Кодовая фаза (в чипах) | ||||
|---|---|---|---|---|---|
| 0,0 | 0,5 | (больше фаз) | 1,022,0 | 1022,5 | |
| -4,750 Гц | • | • | ... | • | • |
| -4,250 Гц | • | • | ... | • | • |
| (больше. частот) | ... | ... | ... | ... | ... |
| 4250 Гц | • | • | ... | • | • |
| 4750 Гц | • | • | ... | • | • |
В качестве улучшения по сравнению с простым методом корреляции можно более эффективно реализовать вычисление скалярных произведений с помощью преобразования Фурье. Вместо выполнения одного скалярного произведения для каждого элемента в декартовом произведении кода и частоты для каждой фазы кода выполняется одна операция, включающая FFT и охватывающая все частоты; каждая такая операция требует больших вычислительных ресурсов, но в целом она может быть быстрее, чем предыдущий метод из-за эффективности алгоритмов БПФ, и восстанавливает несущую частоту с более высокой точностью, поскольку элементы разрешения по частоте расположены очень близко друг к другу в DFT.
В частности, для всех фаз кода в пространстве поиска окно оцифрованного сигнала перемножается элемент за элементом с локальной копией кода (без несущей), а затем обрабатывается с помощью дискретного преобразования Фурье.
Учитывая предыдущий пример, который будет обрабатываться с помощью этого метода, предположим, что данные с действительным знаком (в отличие от комплексных данных, которые будут иметь синфазные и квадратурные компоненты), частота дискретизации 5 МГц, окно сигнала 10 мс и промежуточная частота 2,5 МГц. В цифровом сигнале будет 5 МГц × 10 мс = 50000 отсчетов, и, следовательно, 25 001 частотная составляющая в диапазоне от 0 Гц до 2,5 МГц с шагом 100 Гц (обратите внимание, что составляющая 0 Гц является реальной, потому что это среднее значение реального -значный сигнал и составляющая 2,5 МГц также являются действительными, потому что это критическая частота ). Проверяются только компоненты (или элементы дискретизации) в пределах 5 кГц от центральной частоты, что составляет диапазон от 2,495 МГц до 2,505 МГц, и он покрывается 51 частотной составляющей . Как и в предыдущем случае, имеется 2046 кодовых фаз, таким образом, всего будет исследовано 51 × 2046 = 104 346 комплексных частотных компонентов .
Подобным образом, в качестве усовершенствования по сравнению с простым методом корреляции, можно выполнить одну операцию, охватывающую все фазы кода для каждого частотного элемента. Операция, выполняемая для каждого бина фазы кода, включает прямое БПФ, поэлементное умножение в частотной области. обратное БПФ и дополнительная обработка, так что в целом он вычисляет круговую корреляцию вместо круговой свертки. Это дает более точное определение фазы кода, чем метод простой корреляции в отличие от предыдущего метода, который дает более точное определение несущей частоты, чем предыдущий метод.
Поскольку принимаемая несущая частота может изменяться из-за доплеровского сдвига, точки, где начинаются принятые последовательности PRN, могут не отличаться от O точным целое число миллисекунд. Из-за этого отслеживание несущей частоты вместе с отслеживанием кода PRN используется для определения, когда начинается код PRN принимаемого спутника. В отличие от более раннего вычисления смещения, при котором потенциально могут потребоваться испытания всех 1023 смещений, отслеживание для поддержания блокировки обычно требует смещения на половину ширины импульса или меньше. Для выполнения этого отслеживания приемник наблюдает две величины: фазовую ошибку и сдвиг принятой частоты. Корреляция принятого кода PRN относительно кода PRN, сгенерированного приемником, вычисляется, чтобы определить, не совмещены ли биты двух сигналов. Сравнение принятого кода PRN с кодом PRN, сгенерированным приемником, сдвинутым на половину ширины импульса раньше и позже на половину ширины импульса, используются для оценки требуемой регулировки. Величина корректировки, необходимая для максимальной корреляции, используется при оценке фазовой ошибки. Полученный сдвиг частоты относительно частоты, генерируемой приемником, обеспечивает оценку ошибки скорости фазы. Команда для генератора частоты и любой требуемый дополнительный сдвиг кода PRN вычисляются как функция ошибки фазы и ошибки скорости фазы в соответствии с используемым законом управления. Доплеровская скорость вычисляется как функция смещения частоты от номинальной несущей частоты. Доплеровская скорость - это составляющая скорости вдоль луча визирования приемника относительно спутника.
По мере того, как приемник продолжает считывать последовательные последовательности PRN, он столкнется с внезапным изменением фазы принятого сигнала PRN размером 1023 бита. Это указывает на начало бита данных навигационного сообщения. Это позволяет приемнику начать чтение 20-миллисекундных битов навигационного сообщения. Слово TLM в начале каждого подкадра навигационного кадра позволяет приемнику обнаруживать начало подкадра и определять тактовое время приемника, в которое начинается навигационный подкадр. Слово HOW затем позволяет получателю определить, какой именно подкадр передается. Перед первой оценкой положения может быть задержка до 30 секунд из-за необходимости чтения эфемеридных данных перед вычислением пересечений сферических поверхностей.
После того, как подкадр был считан и интерпретирован, время отправки следующего подкадра может быть вычислено с использованием данных коррекции часов и HOW. Приемник знает время часов приемника, когда было получено начало следующего подкадра, из обнаружения слова телеметрии, что позволяет вычислить время прохождения и, следовательно, псевдодальность. Приемник потенциально способен получать новое измерение псевдодальности в начале каждого подкадра или каждые 6 секунд.
Затем данные орбитального положения или эфемериды из навигационного сообщения используются для точного вычисления того, где находился спутник в начале сообщения. Более чувствительный приемник потенциально получит эфемеридные данные быстрее, чем менее чувствительный приемник, особенно в шумной среде.
Спецификация интерфейса GPS