
Войти
В обработке сигналов, А согласованный фильтр получается путем соотнесения известного задержанного сигнала, или шаблона, с неизвестным сигналом для обнаружения присутствия шаблона в неизвестном сигнале. Это эквивалентно свертке неизвестного сигнала с сопряженной версией шаблона с обращенной во времени. Согласованный фильтр - это оптимальный линейный фильтр для максимизации отношения сигнал / шум (SNR) в присутствии аддитивного стохастического шума.
Согласованные фильтры обычно используются в радарах, в которых отправляется известный сигнал, а отраженный сигнал исследуется на предмет общих элементов исходящего сигнала. Сжатие импульсов является примером согласованной фильтрации. Это так называется, потому что импульсная характеристика согласована с входными импульсными сигналами. Двумерные согласованные фильтры обычно используются при обработке изображений, например, для улучшения отношения сигнал / шум при рентгеновских наблюдениях. Согласованная фильтрация - это метод демодуляции с использованием фильтров LTI (линейный инвариантный во времени) для максимального увеличения SNR. Первоначально он был также известен как Северный фильтр.
В следующем разделе выводится согласованный фильтр для системы с дискретным временем. Вывод для системы с непрерывным временем аналогичен с заменой сумм интегралами.
Согласованный фильтр - это линейный фильтр, который максимизирует отношение выходного сигнала к шуму.
где - вход как функция независимой переменной, а - отфильтрованный выход. Хотя мы чаще всего выражаем фильтры как импульсную характеристику систем свертки, как указано выше (см. Теорию систем LTI ), проще всего думать о согласованном фильтре в контексте внутреннего продукта, который мы вскоре увидим.
Мы можем получить линейный фильтр, который максимизирует отношение выходного сигнала к шуму, используя геометрический аргумент. Интуиция, лежащая в основе согласованного фильтра, основана на корреляции принятого сигнала (вектора) с фильтром (другим вектором), который параллелен сигналу, максимизируя внутренний продукт. Это усиливает сигнал. Когда мы рассматриваем аддитивный стохастический шум, мы сталкиваемся с дополнительной проблемой минимизации выхода из-за шума путем выбора фильтра, ортогонального шуму.
Определим проблему формально. Мы ищем фильтр, такой, чтобы максимизировать отношение выходного сигнала к шуму, где выходной сигнал является внутренним произведением фильтра и наблюдаемого сигнала.
Наш наблюдаемый сигнал состоит из желаемого сигнала и аддитивного шума:
Давайте определим ковариационную матрицу шума, напоминая себе, что эта матрица имеет эрмитову симметрию, свойство, которое станет полезным при выводе:
где обозначает сопряженное транспонирование о, и обозначает ожидание. Назовем наш выход внутренним произведением нашего фильтра и наблюдаемого сигнала таким образом, что
Теперь мы определяем отношение сигнал / шум, которое является нашей целевой функцией, как отношение выходной мощности из-за полезного сигнала к выходной мощности из-за шума:
Перепишем вышесказанное:
Мы хотим максимизировать это количество, выбирая. Раскладывая знаменатель нашей целевой функции, мы имеем
Теперь наш становится
Мы перепишем это выражение с некоторыми манипуляциями с матрицей. Причина этой, казалось бы, контрпродуктивной меры станет очевидной в ближайшее время. Используя эрмитову симметрию ковариационной матрицы, мы можем записать
Мы хотели бы найти верхнюю границу этого выражения. Для этого сначала узнаем форму неравенства Коши – Шварца :
это означает, что квадрат внутреннего произведения двух векторов может быть только таким большим, как произведение отдельных внутренних произведений векторов. Эта концепция возвращается к интуиции, лежащей в основе согласованного фильтра: эта верхняя граница достигается, когда два вектора и параллельны. Мы возобновляем наш вывод, выражая верхнюю границу нашего в свете геометрического неравенства, приведенного выше:
Наши отважные манипуляции с матрицей теперь окупились. Мы видим, что выражение для нашей верхней границы можно значительно упростить:
Мы можем достичь этой верхней границы, если выберем
где - произвольное действительное число. Чтобы проверить это, мы вставляем наше выражение для вывода:
Таким образом, наш оптимальный согласованный фильтр
Мы часто предпочитаем нормализовать ожидаемое значение мощности выходного сигнала фильтра из-за шума до единицы. То есть мы сдерживаем
Это ограничение подразумевает значение, для которого мы можем решить:
уступающий
давая нам нормализованный фильтр,
Если нам нужно записать импульсную характеристику фильтра для системы свертки, это будет просто комплексно-сопряженное обращение времени входа.
Хотя мы получили согласованный фильтр в дискретном времени, мы можем расширить эту концепцию на системы с непрерывным временем, если мы заменим его автокорреляционной функцией непрерывного времени, предполагающей непрерывный сигнал, непрерывный шум и непрерывный фильтр.
В качестве альтернативы, мы можем решить для согласованного фильтра, решив нашу задачу максимизации с помощью лагранжиана. И снова согласованный фильтр стремится максимизировать отношение выходного сигнала к шуму () отфильтрованного детерминированного сигнала в стохастическом аддитивном шуме. Наблюдаемая последовательность опять же
с ковариационной матрицей шума,
Отношение сигнал / шум равно
где и.
Оценивая выражение в числителе, имеем
а в знаменателе
Отношение сигнал / шум становится
Если теперь ограничить знаменатель равным 1, проблема максимизации сведется к максимальному увеличению числителя. Затем мы можем сформулировать проблему, используя множитель Лагранжа :
которую мы распознаем как обобщенную проблему собственных значений
Поскольку он имеет единичный ранг, он имеет только одно ненулевое собственное значение. Можно показать, что это собственное значение равно
давая следующий оптимальный согласованный фильтр
Это тот же результат, что и в предыдущем подразделе.
Согласованная фильтрация также может интерпретироваться как оценка методом наименьших квадратов для оптимального расположения и масштабирования данной модели или шаблона. Еще раз, пусть наблюдаемая последовательность определяется как
где - некоррелированный шум с нулевым средним. Предполагается, что сигнал является масштабированной и сдвинутой версией известной модельной последовательности:
Мы хотим найти оптимальные оценки и для неизвестного сдвига и масштабирования, минимизируя остаток методом наименьших квадратов между наблюдаемой последовательностью и «проверочной последовательностью»:
Соответствующий фильтр позже окажется согласованным фильтром, но он еще не определен. Расширение и квадрат внутри суммы дают
Первый член в скобках является константой (поскольку дается наблюдаемый сигнал) и не влияет на оптимальное решение. Последний член имеет постоянное ожидаемое значение, потому что шум некоррелирован и имеет нулевое среднее значение. Таким образом, мы можем исключить оба термина из оптимизации. Поменяв знак на противоположный, получим эквивалентную задачу оптимизации
Установка производной по отношению к нулю дает аналитическое решение для:
Вставка этого в нашу целевую функцию дает сокращенную задачу максимизации всего за:
Числитель можно ограничить сверху с помощью неравенства Коши – Шварца :
Задача оптимизации принимает максимум, когда в этом выражении выполняется равенство. Согласно свойствам неравенства Коши – Шварца это возможно только при
для произвольных ненулевых констант или, и оптимальное решение получается при желаемом. Таким образом, наша «последовательность зондирования» должна быть пропорциональна модели сигнала, и удобный выбор дает согласованный фильтр.
Обратите внимание, что фильтр является зеркальной моделью сигнала. Это гарантирует, что операция, применяемая для поиска оптимума, действительно является сверткой между наблюдаемой последовательностью и согласованным фильтром. Отфильтрованная последовательность предполагает максимум в том месте, где наблюдаемая последовательность наилучшим образом соответствует (в смысле наименьших квадратов) модели сигнала.
Согласованный фильтр может быть получен множеством способов, но как частный случай процедуры наименьших квадратов его также можно интерпретировать как метод максимального правдоподобия в контексте модели (цветного) гауссовского шума и связанной с ним вероятности Уиттла. Если передаваемый сигнал не имеет неизвестных параметров (таких как время прихода, амплитуда и т. Д.), То согласованный фильтр, согласно лемме Неймана – Пирсона, минимизирует вероятность ошибки. Однако, поскольку точный сигнал обычно определяется неизвестными параметрами, которые эффективно оцениваются (или подгоняются ) в процессе фильтрации, согласованный фильтр представляет собой обобщенную статистику максимального правдоподобия (тестовую). Отфильтрованные временные ряды затем можно интерпретировать как (пропорционально) вероятности профиля, максимальной условной вероятности как функции параметра времени. Это, в частности, означает, что вероятность ошибки (в смысле Неймана и Пирсона, т. Е. Относительно максимизации вероятности обнаружения для данной вероятности ложной тревоги) не обязательно оптимальна. То, что обычно называют отношением сигнал / шум (SNR), которое должно быть максимизировано согласованным фильтром, в этом контексте соответствует, где - (условно) максимальное отношение правдоподобия.
Конструкция согласованного фильтра основана на известном спектре шума. В действительности, однако, спектр шума обычно оценивается по данным и, следовательно, известен только с ограниченной точностью. Для случая неопределенного спектра согласованный фильтр может быть обобщен до более надежной итерационной процедуры с благоприятными свойствами также в негауссовском шуме.
При рассмотрении в частотной области очевидно, что согласованный фильтр применяет наибольшее взвешивание к спектральным компонентам, демонстрирующим наибольшее отношение сигнал / шум (т. Е. Большой вес при относительно низком уровне шума, и наоборот). Как правило, для этого требуется непрямая частотная характеристика, но связанное с этим "искажение" не является поводом для беспокойства в таких ситуациях, как радар и цифровая связь, где исходная форма волны известна, а целью является обнаружение этого сигнала на фоне фонового шума.. С технической стороны согласованный фильтр представляет собой взвешенный метод наименьших квадратов, основанный на ( гетероскедастических ) данных частотной области (где «веса» определяются через спектр шума, см. Также предыдущий раздел) или, что то же самое, наименьшее - к отбеленным данным применен метод квадратов.
Согласованные фильтры часто используются при обнаружении сигналов. В качестве примера предположим, что мы хотим судить о расстоянии до объекта, отражая от него сигнал. Мы можем выбрать передачу синусоиды чистого тона с частотой 1 Гц. Мы предполагаем, что наш принятый сигнал представляет собой ослабленную и сдвинутую по фазе форму переданного сигнала с добавленным шумом.
Чтобы судить о расстоянии до объекта, мы коррелируем полученный сигнал с согласованным фильтром, который в случае белого (некоррелированного) шума является еще одной синусоидой 1 Гц с чистым тоном. Когда выходной сигнал согласованной системы фильтров превышает определенный порог, мы с высокой вероятностью заключаем, что принятый сигнал отражен от объекта. Используя скорость распространения и время, в которое мы впервые наблюдаем отраженный сигнал, мы можем оценить расстояние до объекта. Если мы изменим форму импульса специально разработанным способом, отношение сигнал / шум и разрешение по расстоянию можно будет даже улучшить после согласованной фильтрации: это метод, известный как сжатие импульсов.
Кроме того, согласованные фильтры могут использоваться в задачах оценки параметров (см. Теорию оценивания ). Чтобы вернуться к нашему предыдущему примеру, мы можем захотеть оценить скорость объекта в дополнение к его положению. Чтобы использовать эффект Доплера, мы хотели бы оценить частоту принимаемого сигнала. Для этого мы можем коррелировать принятый сигнал с несколькими согласованными фильтрами синусоид на различных частотах. Согласованный фильтр с максимальной выходной мощностью с большой вероятностью обнаружит частоту отраженного сигнала и поможет нам определить скорость объекта. Фактически, этот метод является простой версией дискретного преобразования Фурье (ДПФ). ДПФ принимает комплексный вход с двумя значениями и коррелирует его с согласованными фильтрами, соответствующими комплексным экспонентам на разных частотах, чтобы получить комплексные числа, соответствующие относительным амплитудам и фазам синусоидальных компонентов (см. Индикация движущейся цели ).
Согласованный фильтр также используется в коммуникациях. В контексте системы связи, которая отправляет двоичные сообщения от передатчика к приемнику по зашумленному каналу, согласованный фильтр может использоваться для обнаружения переданных импульсов в зашумленном принятом сигнале.

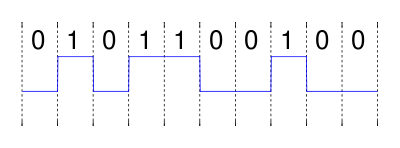
Представьте, что мы хотим отправить последовательность «0101100100», закодированную в неполярном без возврата к нулю (NRZ), через определенный канал.
Математически последовательность в коде NRZ может быть описана как последовательность единичных импульсов или сдвинутых прямоугольных функций, при этом каждый импульс взвешивается на +1, если бит равен «1», и на -1, если бит равен «0». Формально коэффициент масштабирования для долота равен,
Мы можем представить наше сообщение как сумму сдвинутых единичных импульсов:
где - длина одного бита.
Таким образом, сигнал, который должен послать передатчик,
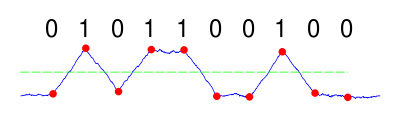
Если мы моделируем наш зашумленный канал как канал AWGN, к сигналу добавляется белый гауссовский шум. На стороне приемника для отношения сигнал / шум 3 дБ это может выглядеть так:

Первый взгляд не покажет исходную переданную последовательность. Уровень шума выше мощности полезного сигнала (т. Е. Отношение сигнал / шум низкое). Если бы приемник отбирал этот сигнал в правильные моменты, результирующее двоичное сообщение могло бы противоречить исходному переданному.
Чтобы увеличить отношение сигнал / шум, мы пропускаем полученный сигнал через согласованный фильтр. В этом случае фильтр должен быть согласован с импульсом NRZ (эквивалентным «1», закодированной в коде NRZ). Точнее говоря, импульсная характеристика идеального согласованного фильтра, предполагающая белый (некоррелированный) шум, должна быть масштабированной комплексно-сопряженной версией сигнала, который мы ищем, с обращенной во времени. Мы выбрали
В этом случае из-за симметрии обращенное во времени комплексное сопряжение равно фактически, что позволяет нам вызывать импульсную характеристику нашей системы свертки согласованного фильтра.
После свертки с правильным согласованным фильтром результирующий сигнал будет
где обозначает свертку.

Который теперь может быть безопасно выбран приемником в правильные моменты выборки и сравнен с соответствующим порогом, что приводит к правильной интерпретации двоичного сообщения.
Согласованные фильтры играют центральную роль в гравитационно-волновой астрономии. Первое наблюдение гравитационных волн было основано на крупномасштабной фильтрации выхода каждого детектора для сигналов, напоминающих ожидаемой форму, а затем последующим скринингом на совпадающие и согласованные триггера между обеими инструментами. Частота ложных тревог и, соответственно, статистическая значимость обнаружения были затем оценены с использованием методов повторной выборки. Вывод о параметрах астрофизических источников был завершен с использованием байесовских методов, основанных на параметризованных теоретических моделях для формы сигнала и (опять же) на вероятности Уиттла.

![{\ Displaystyle \ Y [N] = \ сумма _ {к = - \ infty} ^ {\ infty} ч [nk] x [k],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/70eeb69f981b478fdccd8fed054f8728c91227aa)
![х [k]](https://wikimedia.org/api/rest_v1/media/math/render/svg/19b6396a35db17413c0052c56544ed76ac0f3b30)

![y [n]](https://wikimedia.org/api/rest_v1/media/math/render/svg/305428e6d1fb59cd0163a7a96ace52292a262afa)








![\ y = \ sum _ {k = - \ infty} ^ {\ infty} h ^ {*} [k] x [k] = h ^ {\ mathrm {H}} x = h ^ {\ mathrm {H} } s + h ^ {\ mathrm {H}} v = y_ {s} + y_ {v}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/aad4d727dc211aea3da1ad28d52ae175f2a26155)










![\ mathrm {SNR} = {\ frac {| {(R_ {v} ^ {1/2} h)} ^ {\ mathrm {H}} (R_ {v} ^ {- 1/2} s) | ^ {2}} {{(R_ {v} ^ {1/2} h)} ^ {\ mathrm {H}} (R_ {v} ^ {1/2} h)}} \ leq {\ frac {\ left [{(R_ {v} ^ {1/2} h)} ^ {\ mathrm {H}} (R_ {v} ^ {1/2} h) \ right] \ left [{(R_ {v} ^ {- 1/2} s)} ^ {\ mathrm {H}} (R_ {v} ^ {- 1/2} s) \ right]} {{(R_ {v} ^ {1/2} h)} ^ {\ mathrm {H}} (R_ {v} ^ {1/2} h)}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/f268f11037b29e4567a27b87e25079d128d0a65b)







































![\ j ^ {*}, \ mu ^ {*} = \ arg \ min _ {j, \ mu} \ left [\ sum _ {k} (s_ {k} + v_ {k}) ^ {2} + \ mu ^ {2} \ sum _ {k} h_ {jk} ^ {2} -2 \ mu \ sum _ {k} s_ {k} h_ {jk} -2 \ mu \ sum _ {k} v_ { k} h_ {jk} \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/988b6a61791bda9da713a2527abcf5f1cb492897) .
.![\ j ^ {*}, \ mu ^ {*} = \ arg \ max _ {j, \ mu} \ left [2 \ mu \ sum _ {k} s_ {k} h_ {jk} - \ mu ^ { 2} \ sum _ {k} h_ {jk} ^ {2} \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/103c436accb2e3fcb6d87c886382e8d47a3002cc) .
.
 .
. .
. .
. .
.




 .
.












