
Войти
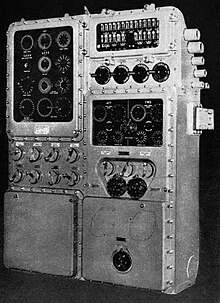 США Компьютер данных торпед ВМС Mk III, стандартный компьютер управления торпедным огнем ВМС США во время Второй мировой войны. Позже во время Второй мировой войны (1943 г.) TDC Mk III был заменен TDC Mk IV, который был улучшенной и увеличенной версией Mk III.
США Компьютер данных торпед ВМС Mk III, стандартный компьютер управления торпедным огнем ВМС США во время Второй мировой войны. Позже во время Второй мировой войны (1943 г.) TDC Mk III был заменен TDC Mk IV, который был улучшенной и увеличенной версией Mk III. Компьютер данных торпед (TDC ) был ранним электромеханическим аналоговым компьютером, который использовался для торпеды управления огнем на американском подводные лодки во время Второй мировой войны. Великобритания, Германия и Япония также разработали оборудование для автоматического управления торпедным огнем, но ни одно из них не было столь же совершенным, как ВМТ ВМС США., так как он мог автоматически отслеживать цель, а не просто предлагать решение для мгновенной стрельбы. Эта уникальная возможность TDC установила стандарт управления огнем подводных торпед во время Второй мировой войны.
Замена ранее использовавшихся ручных устройств линейки типа ( известный как "банджо" и "есть / был"), TDC был разработан для обеспечения решений по управлению огнем при стрельбе торпедами подводных лодок по кораблям, движущимся на поверхности (надводные боевые корабли использовали другой компьютер).
ВМТ была довольно громоздким дополнением к боевой рубке субмарины и требовала двух дополнительных членов экипажа: одного в качестве специалиста по ее обслуживанию, а другого в качестве оператора. Несмотря на эти недостатки, использование TDC было важным фактором в успешной программе коммерческих рейдов, проводимой американскими подводными лодками во время Тихоокеанской кампании Второй мировой войны. В отчетах об американской кампании подводных лодок в Тихом океане часто упоминается использование TDC. Некоторые офицеры приобрели высокую квалификацию в его использовании, и ВМС создали учебную школу для его использования.
Две модернизированные подводные лодки ВМС США времен Второй мировой войны (USS Tusk и Cutlass ) со своими ВМТ продолжают служить в ВМС Тайваня и США. Сотрудники Морского музея помогают им в ремонте оборудования. В музее также есть полностью отреставрированный и действующий ВМТ из USS Pampanito, пришвартованный в Сан-Франциско.
Проблема наведения торпеды занимала военных инженеров с тех пор, как Роберт Уайтхед разработал современную торпеду в 1860-х годах. Эти ранние торпеды летели на заданной глубине по прямому курсу (поэтому их часто называют «прямыми бегунами»). Это было последним достижением в области наведения торпед до создания самонаводящейся торпеды во второй половине Второй мировой войны. Подавляющее большинство торпед подводных лодок во время Второй мировой войны были прямоточными, и они продолжали использоваться в течение многих лет после Второй мировой войны. Фактически, две прямоточные торпеды времен Второй мировой войны, запущенные британской атомной подводной лодкой HMS Conqueror, потопили ARA General Belgrano в 1982 году.
Во время Первой мировой войны вычисление курса перехвата цели для торпеды было ручным процессом, в котором группа управления огнем использовала различные правила скольжения (примеры США были (в просторечии назывались «банджо» из-за его формы) и круговое ползунковое правило «Есть / Было» () для предсказания, где будет находиться цель на основе того, где она сейчас и была) или механического калькулятора / прицелов. Часто они были «прискорбно неточными», что помогает объяснить, почему было рекомендовано распространение торпед.
Во время Второй мировой войны Германия, Япония и США разработали аналоговые компьютеры для автоматизации процесса расчета необходимого курса торпеды.
В 1932 году Бюро боеприпасов (BuOrd) инициировало разработку TDC с помощью и. Это привело к появлению «очень сложной» модели Mark 1 в 1938 году. Она была модернизирована на более старые лодки, начиная с Dolphin и заканчивая новейшими Salmons.
. Первой подводной лодкой, разработанной для использования ВМТ, была Tambor, спущенный на воду в 1940 году с Mark III, расположенный в боевой рубке . (Это отличалось от более ранних моделей.) Это оказалось лучшей системой управления торпедным огнем Второй мировой войны.
. В 1943 году был разработан компьютер данных торпеды Mark IV для поддержки Mark 18
И Mk III, и Mk IV TDC были разработаны Arma Corporation (ныне американская Bosch Arma).
 Рисунок 2: Иллюстрация общей проблемы управления огнем торпед
Рисунок 2: Иллюстрация общей проблемы управления огнем торпед Прямолинейная торпеда имеет систему управления на основе гироскопа это гарантирует, что торпеда будет идти прямым курсом. Торпеда может двигаться по курсу, отличному от курса подводной лодки, путем регулировки параметра, называемого углом гироскопа, который устанавливает курс торпеды относительно курса подводной лодки (см. Рисунок 2). Основная роль ВМТ - определение угла наклона гироскопа, необходимого для того, чтобы торпеда поразила цель.
Для определения угла гироскопа требовалось решение в реальном времени сложного тригонометрического уравнения (см. Уравнение 1 для упрощенного примера). TDC обеспечил непрерывное решение этого уравнения, используя обновления данных от навигационных датчиков подводной лодки и системы слежения за целями TDC. TDC также может автоматически обновлять все настройки угла наклона гироскопа торпеды одновременно с решением управления огнем, что повышает точность по сравнению с системами, требующими ручного обновления курса торпеды.
TDC позволяет подводной лодке запускать торпеду по курсу, отличному от курса подводной лодки, что важно с тактической точки зрения. В противном случае подводную лодку нужно было бы навести на предполагаемую точку перехвата, чтобы запустить торпеду. Требование наведения всего судна для запуска торпеды потребовало бы времени, требовало точного контроля курса подводной лодки и без необходимости усложняло бы процесс торпедной стрельбы. ВМТ с сопровождением цели дает подводной лодке возможность маневрировать независимо от требуемого для торпеды курса перехвата цели.
Как показано на рисунке 2, в общем, торпеда не движется по прямой сразу после запуска и не разгоняется мгновенно до полной скорости, что называется баллистическими характеристиками торпеды. Баллистические характеристики описываются тремя параметрами: вылетом, радиусом поворота и скорректированной скоростью торпеды. Кроме того, угол пеленга цели отличается с точки зрения перископа и с точки зрения торпеды, что называется параллаксом торпедного аппарата. Эти факторы являются существенным затруднением при вычислении угла гироскопа, и ВМТ должна компенсировать их влияние.
Прямолинейные торпеды обычно запускались залпом (т. Е. Несколько пусков за короткий промежуток времени) или разбросом (т. Е. Множественные пуски с небольшим смещением угла), чтобы увеличить вероятность поражения цели с учетом неточностей, имеющихся в измерение углов, дальности до цели, скорости цели, угла траектории торпеды и скорости торпеды.
Также были запущены залпы и залпы, чтобы поразить сложные цели несколько раз, чтобы гарантировать их уничтожение. ВМТ поддерживал стрельбу залпами торпед, обеспечивая короткие временные смещения между выстрелами и разлетами торпед, добавляя небольшие угловые смещения к углу гироскопа каждой торпеды. Перед потоплением корабля Южной Кореи ROKS Cheonan Северной Кореей в 2010 году, последний военный корабль был потоплен в результате торпедной атаки подводной лодки, ARA General Belgrano в 1982 году был поражен двумя торпедами из трех торпед.
 Взгляд внутрь ВМТ показывает двигатели, приводящие в движение Position Keeper.
Взгляд внутрь ВМТ показывает двигатели, приводящие в движение Position Keeper. Чтобы точно вычислить угол гироскопа для Для торпеды в общем сценарии поражения необходимо точно знать курс, скорость, дальность и азимут цели. Во время Второй мировой войны оценки курса, дальности и пеленга цели часто приходилось генерировать с помощью перископических наблюдений, которые были очень субъективными и подверженными ошибкам. ВМТ использовалась для уточнения оценок курса, дальности и пеленга цели посредством процесса
Оценка курса цели обычно считалась самой сложной из задач наблюдения. Точность результата сильно зависела от опыта капитана. Во время боя фактический курс цели обычно не определялся, но вместо этого капитаны определяли связанную величину, называемую «угол лука ». Угол на носу - это угол, образованный курсом цели и прямой видимостью подводной лодки. Некоторые шкиперы, такие как Ричард О'Кейн, практиковали определение угла на носу, глядя на модели кораблей IJN, установленные на откалиброванной ленивой Сьюзан в перевернутый бинокль. ствол.
Для получения данных о местоположении цели в зависимости от времени, ВМТ должен был решить уравнения движения цели относительно подводной лодки. Уравнения движения представляют собой дифференциальные уравнения, и ВМТ использовала механические интеграторы для выработки своего решения.
ВМТ нужно было расположить рядом с другим оборудованием управления огнем, чтобы минимизировать количество электромеханических соединений. Поскольку пространство подводной лодки в прочном корпусе было ограничено, ВМТ должна была быть как можно меньше. На подводных лодках времен Второй мировой войны ВМТ и другое оборудование управления огнем устанавливались в боевой рубке , которая была очень маленькой. Проблема с упаковкой была серьезной, и производительность некоторых ранних устройств управления торпедным огнем была затруднена из-за необходимости сделать их небольшими. У него был набор ручных рычагов, циферблатов и переключателей для ввода и отображения данных. Для создания решения по управлению огнем требовались вводные данные о курсе и скорости подводной лодки
ВМТ выполнил тригонометрические расчеты, необходимые для расчета курса перехвата цели для торпеды. Он также имел электромеханический интерфейс с торпедами, что позволяло ему автоматически устанавливать курс, пока торпеды еще находились трубы, готовые к стрельбе.
Возможность отслеживания цели в ВМТ использовалась группой управления огнем для постоянного обновления решения управления огнем, даже когда подводная лодка маневрировала. Способность ВМТ сопровождать цель также позволяла подводной лодке точно стрелять торпедами, даже когда цель был временно закрыт дымом или туманом.
Поскольку ВМТ фактически выполнял две отдельные функции, генерируя оценки положения цели и вычисляя углы запуска торпед, ВМТ фактически состоял из двух типов аналоговых компьютеров:
Уравнения, реализованные в решателе углов, можно найти в руководстве Torpedo Data Computer. В Руководстве по управлению торпедным огнем подводных лодок расчеты обсуждаются в общем смысле, и здесь представлена сильно сокращенная форма этого обсуждения.
Общая проблема управления торпедным огнем проиллюстрирована на рисунке 2. Проблема станет более разрешимой, если мы предположим:
 Рисунок 3: Треугольник управления торпедным огнем
Рисунок 3: Треугольник управления торпедным огнем Как видно на рисунке 2, эти предположения являются не актуально в общем из-за баллистических характеристик торпеды и параллакса торпедных аппаратов. Подробное описание того, как исправить расчет угла гироскопа торпеды с учетом баллистики и параллакса, сложно и выходит за рамки данной статьи. В большинстве обсуждений определения угла гироскопа используется более простой подход с использованием рисунка 3, который называется треугольником управления торпедным огнем. На рисунке 3 представлена точная модель для расчета угла гироскопа, когда угол гироскопа мал, обычно менее 30 °.
Влияние параллакса и баллистики минимально для запусков с малым углом гироскопа, поскольку вызываемые ими отклонения от курса обычно достаточно мал, чтобы его нельзя было не заметить. Подводные лодки США во время Второй мировой войны предпочитали стрелять своими торпедами с малых углов гироскопа, потому что решения управления огнем ВМТ были наиболее точными для малых углов.
Проблема вычисления угла гироскопа представляет собой проблему тригонометрии, которая упрощается Сначала рассмотрим расчет угла отклонения без учета баллистики торпеды и параллакса. Для малых углов гироскопа θ гироскоп ≈ θ пеленг - θ отклонение. Прямое применение закона синусов к рисунку 3 дает уравнение 1.
 | (1) |
где
Дальность не играет роли в уравнении 1, что верно до тех пор, пока выполняются три предположения. Фактически, уравнение 1- это то же уравнение, которое решается с помощью механических прицелов управляемых торпедных аппаратов, используемых на надводных кораблях во время Первой и Второй мировых войн. Запуск торпед с управляемых торпедных аппаратов хорошо соответствует трем заявленным предположениям. Однако точный пуск торпеды с подводной лодки требует параллакса и баллистических поправок торпеды при больших углах гироскопа. Эти поправки требуют точного знания диапазона. Когда дальность до цели не была известна, запуски торпед, требующие больших углов гироскопа, не рекомендовались.
Уравнение 1часто модифицируется, чтобы заменить угол отклонения углом траектории (угол траектории определен на рисунке 2, θ Колея = θ изгиб + θ отклонение). Эта модификация проиллюстрирована уравнением 2.
 | (2) |
где θ Track - это угол между курсом корабля-цели и курсом торпеды.
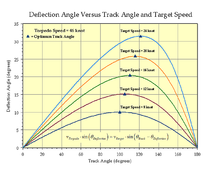 Рисунок 4: Зависимость угла отклонения от угла траектории и скорости цели (θ гироскоп = 0 °).
Рисунок 4: Зависимость угла отклонения от угла траектории и скорости цели (θ гироскоп = 0 °). В ряде публикаций оптимальный угол траектории торпеды составляет 110 ° для Mk 14 (46 узловое оружие). На рисунке 4 показан график зависимости угла отклонения от угла трека, когда угол гироскопа равен 0 ° (т. Е. Θ Отклонение = θ Пеленг). Оптимальный угол пути определяется как точка минимальной чувствительности угла отклонения к ошибкам угла пути для данной целевой скорости. Этот минимум возникает в точках нулевого наклона кривых на рисунке 4 (эти точки отмечены маленькими треугольниками).
Кривые показывают решения уравнения 2для угла отклонения как функции целевой скорости и угла следа. Рисунок 4 подтверждает, что 110 ° - это оптимальный угол сопровождения цели со скоростью 16 узлов (30 км / ч), что является обычной скоростью корабля.
Для управления огнем японских торпед имеется достаточно полная документация. компьютер, который выполняет детали корректировки баллистических и параллаксных факторов. Хотя TDC, возможно, не использовал точно такой же подход, он, вероятно, был очень похож.
Как и в случае с угловым решателем, уравнения, реализованные в угловом решателе, можно найти в руководстве Torpedo Data Computer. Аналогичные функции реализованы в дальномерах надводных корабельных систем управления огнем. Для общего обсуждения принципов, лежащих в основе позиции хранителя, см. Rangekeeper.
{kind=link}