Для алгоритма оптимизации см.
Градиентный спуск.
В математике метод градиентного спуска или методом перевала является продолжением метода Лапласа для аппроксимации интеграла, где один деформируется интегральный контур в комплексной плоскости проходить вблизи стационарной точки ( седловой точки ), примерно в том направлении наискорейший спуск или стационарная фаза. Приближение перевала используется с интегралами в комплексной плоскости, тогда как метод Лапласа используется с вещественными интегралами.
Подлежащий оценке интеграл часто имеет вид

где C - контур, а λ большое. Один из вариантов метода наискорейшего спуска деформирует контур интегрирования C в новый путь интегрирования C ' так, чтобы выполнялись следующие условия:
- C ′ проходит через один или несколько нулей производной g ′ ( z),
- мнимая часть g ( z) постоянна на C ′.
Метод наискорейшего спуска был впервые опубликован Дебаем (1909), который использовал его для оценки функций Бесселя и указал, что он имел место в неопубликованной заметке Римана (1863) о гипергеометрических функциях. Контур наискорейшего спуска обладает свойством минимаксности, см. Федорюк (2001). Сигель (1932) описал некоторые другие неопубликованные заметки Римана, в которых он использовал этот метод для вывода формулы Римана – Зигеля. ошибка harvtxt: нет цели: CITEREFFedoryuk2001 ( помощь )
СОДЕРЖАНИЕ
- 1 Основная идея
- 2 Этимология
- 3 Простая оценка [2]
- 4 Случай единственной невырожденной седловой точки
- 4.1 Основные понятия и обозначения
- 4.2 Комплексная лемма Морса
- 4.3. Асимптотическое разложение в случае одной невырожденной седловой точки.
- 5 Случай кратных невырожденных седловых точек
- 6 Другие случаи
- 7 Расширения и обобщения
- 8 См. Также
- 9 Примечания
- 10 Ссылки
Основная идея
Метод наискорейшего спуска - это метод аппроксимации комплексного интеграла вида

для больших, где и -
аналитические функции от. Поскольку подынтегральное выражение является аналитическим, контур можно деформировать в новый контур без изменения интеграла. В частности, ищут новый контур, на котором мнимая часть постоянна. потом








а оставшийся интеграл можно аппроксимировать другими методами, например
методом Лапласа.
Этимология
Этот метод называется методом наискорейшего спуска, потому что для аналитических контуров с постоянной фазой они эквивалентны контурам наискорейшего спуска.
Если -
аналитическая функция от, она удовлетворяет
уравнениям Коши – Римана 


потом

Таким образом, контуры постоянной фазы также являются контурами наискорейшего спуска.
Простая оценка
Пусть f, S : C n → C и C ⊂ C n. Если

где обозначает действительную часть, и существует положительное вещественное число λ 0 такое, что 

то справедлива следующая оценка:

Доказательство простой оценки:

Случай единственной невырожденной седловой точки
Основные понятия и обозначения
Пусть x - комплексный n -мерный вектор и

обозначают матрицу Гессе для функции S ( x). Если

является векторной функцией, то ее матрица Якоби определяется как

Невырожденная седловая точка, г 0 ∈ С п, голоморфная функцией S ( г) является критической точкой функции (т.е. ∇ S ( г 0) = 0), где матрица Гесса функции имеет в неисчезающей определитель (т.е.). 
Следующее является основным инструментом для построения асимптотики интегралов в случае невырожденной седловой точки:
Комплексная лемма Морса
Морзе лемма для вещественных функций обобщают следующий образом для голоморфных функций : вблизи невырожденной седловой точки г 0 голоморфной функции S ( г), существует координаты в терминах которых S ( г) - С ( г 0) точно квадратичный. Чтобы сделать это точным, пусть S - голоморфная функция с областью определения W ⊂ C n, и пусть z 0 в W - невырожденная седловая точка S, то есть ∇ S ( z 0) = 0 и. Тогда существуют окрестности U ⊂ W из г 0 и V ⊂ C п о ш = 0, и биективном голоморфной функции ф : V → U с ф (0) = г 0 такое, что

Здесь μ j - собственные значения матрицы. 

Иллюстрация комплексной леммы Морса Доказательство комплексной леммы Морса -
Следующее доказательство является прямым обобщением доказательства действительной леммы Морса, которое можно найти в. Начнем с демонстрации
- Вспомогательное заявление. Пусть F : С п → С быть голоморфна в окрестности начала координат и F (0) = 0. Тогда в некоторой окрестности существуют функции g i : C n → C такие, что

- где каждый г я является голоморфным и

От личности

мы заключаем, что

а также

Без ограничения общности переводим начало координат в z 0, так что z 0 = 0 и S (0) = 0. Используя вспомогательное утверждение, имеем

Поскольку начало координат - седловая точка,

мы также можем применить вспомогательное утверждение к функциям g i ( z) и получить
-
 (1)
(1)
Напомним, что произвольная матрица A может быть представлена как сумма симметричной A ( s) и антисимметричной A ( a) матриц,

Сжатие любой симметричной матрицы B с произвольной матрицей A есть

(2)
т.е. антисимметричный компонент A не вносит вклада, потому что

Таким образом, h ij ( z) в уравнении (1) можно считать симметричным относительно перестановки индексов i и j. Обратите внимание, что

следовательно, det ( h ij (0)) ≠ 0, поскольку начало координат - невырожденная седловая точка.
Покажем по индукции, что существуют локальные координаты u = ( u 1,... u n), z = ψ ( u), 0 = ψ (0), такие, что
-
 (3)
(3)
Сначала предположим, что существуют локальные координаты y = ( y 1,... y n), z = φ ( y), 0 = φ (0), такие, что
-
 (4)
(4)
где H ij симметричен в силу уравнения (2). Линейной заменой переменных ( y r,... y n) можно гарантировать, что H rr (0) ≠ 0. Из цепного правила имеем

Следовательно:

откуда,

Матрица ( H ij (0)) может быть преобразована в нормальную форму Жордана : ( H ij (0)) = LJL −1, если L дает желаемое невырожденное линейное преобразование, а диагональ матрицы J содержит ненулевые собственные значения из ( H ij (0)). Если H ij (0) ≠ 0, то в силу непрерывности H ij ( y) оно также должно быть отличным от нуля в некоторой окрестности начала координат. Введя, пишем 
![\ begin {align} S (\ boldsymbol {\ varphi} (y)) = amp; y_1 ^ 2 + \ cdots + y_ {r-1} ^ 2 + H_ {rr} (y) \ sum_ {i, j = r } ^ n y_i y_j \ tilde {H} _ {ij} (y) \\ = amp; y_1 ^ 2 + \ cdots + y_ {r-1} ^ 2 + H_ {rr} (y) \ left [y_r ^ 2 + 2y_r \ sum_ {j = r + 1} ^ n y_j \ tilde {H} _ {rj} (y) + \ sum_ {i, j = r + 1} ^ n y_i y_j \ tilde {H} _ {ij } (y) \ right] \\ = amp; y_1 ^ 2 + \ cdots + y_ {r-1} ^ 2 + H_ {rr} (y) \ left [\ left (y_r + \ sum_ {j = r + 1) } ^ n y_j \ tilde {H} _ {rj} (y) \ right) ^ 2 - \ left (\ sum_ {j = r + 1} ^ n y_j \ tilde {H} _ {rj} (y) \ right) ^ 2 \ right] + H_ {rr} (y) \ sum_ {i, j = r + 1} ^ n y_i y_j \ tilde {H} _ {ij} (y) \ end {align}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c6897bd4bcd2f3e6b2ed9ee4a071351b07ec6522)
Руководствуясь последним выражением, введем новые координаты z = η ( x), 0 = η (0),

Замена переменных y ↔ x локально обратима, поскольку соответствующий якобиан отличен от нуля,
![\левый. \ frac {\ partial x_r} {\ partial y_k} \ right | _ {y = 0} = \ sqrt {H_ {rr} (0)} \ left [\ delta_ {r, \, k} + \ sum_ {j = r + 1} ^ n \ delta_ {j, \, k} \ tilde {H} _ {jr} (0) \ right].](https://wikimedia.org/api/rest_v1/media/math/render/svg/31789a60384c5526af564f02843e6aff3065930c)
Следовательно,
-
 (5)
(5)
Сравнивая уравнения (4) и (5), заключаем, что уравнение (3) проверено. Обозначая собственные значения из по ц J, уравнение (3) можно переписать в виде 
-
 (6)
(6)
Следовательно,
-
 (7)
(7)
Из уравнения (6) следует, что. Джордан нормальная форма из гласит, где J г является верхней диагональная матрица, содержащая собственные значения и DET P ≠ 0 ; следовательно,. Из уравнения (7) получаем 


![\ det S '' _ {ww} (\ boldsymbol {\ varphi} (0)) = \ left [\ det \ boldsymbol {\ varphi} '_ w (0) \ right] ^ 2 \ det S' '_ {zz } (0) \ Longrightarrow \ det \ boldsymbol {\ varphi} '_ w (0) = \ pm 1.](https://wikimedia.org/api/rest_v1/media/math/render/svg/64f03f4136b8cea03e8a7418fd989c79469d1250)
Если, то замена двух переменных гарантирует это. 

Асимптотическое разложение в случае одной невырожденной седловой точки
Предполагать
- е ( г) и С ( г) являются голоморфными функциями в открытом, ограниченном, и просто подсоединенном множестве Ω х ⊂ С п такоечто я х = Ω х ∩ R п буду подключен ;
-
 имеет единственный максимум: ровно для одной точки x 0 ∈ I x ;
имеет единственный максимум: ровно для одной точки x 0 ∈ I x ;
- x 0 - невырожденная седловая точка (т. е. ∇ S ( x 0) = 0 и).

Тогда имеет место следующая асимптотика
-
 (8)
(8)
где μ J являются собственными значениями матрицы Гессе и определяются с аргументами 


(9)
Это утверждение является частным случаем более общих результатов, представленных в работе Федорюка (1987).
Вывод уравнения (8) -
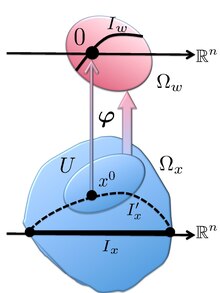
Иллюстрация к выводу уравнения (8)
Сначала мы деформируем контур I x в новый контур, проходящий через седловую точку x 0 и разделяющий границу с I x. Эта деформация не меняет значения интеграла I ( λ). Мы используем комплексную лемму Морса для замены переменных интегрирования. Согласно лемме функция φ ( w) отображает окрестность x 0 ∈ U ⊂ Ω x на окрестность Ω w, содержащую начало координат. Интеграл I ( λ) можно разбить на два: I ( λ) = I 0 ( λ) + I 1 ( λ), где I 0 ( λ) - интеграл по, а I 1 ( λ) - по окончанию (т. Е., оставшаяся часть контура I ′ x). Поскольку последняя область не содержит седловой точки x 0, значение I 1 ( λ) экспоненциально меньше, чем I 0 ( λ) при λ → ∞ ; таким образом, I 1 ( λ) игнорируется. Вводя контур I w так, чтобы имеем 



-
![I_0 (\ lambda) = e ^ {\ lambda S (x ^ 0)} \ int_ {I_w} f [\ boldsymbol {\ varphi} (w)] \ exp \ left (\ lambda \ sum_ {j = 1} ^ n \ tfrac {\ mu_j} {2} w_j ^ 2 \ right) \ left | \ det \ boldsymbol {\ varphi} _w '(w) \ right | dw.](https://wikimedia.org/api/rest_v1/media/math/render/svg/e1b524ecff5b68963c862f2b2b85da2571de8042) (10)
(10)
Напоминая, что x 0 = φ (0), а также, мы разложим предэкспоненциальную функцию в ряд Тейлора и оставим только старший член нулевого порядка 
![{\ displaystyle f [{\ boldsymbol {\ varphi}} (ш)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/65ee4f2688eb598e8e07a62c82271d65764e9f83)
-
 (11)
(11)
Здесь мы заменили область интегрирования I w на R n, потому что обе содержат начало координат, которое является седловой точкой, следовательно, они равны с точностью до экспоненциально малого члена. Интегралы в правой части уравнения (11) могут быть выражены как
-
 (12)
(12)
Из этого представления мы заключаем, что условие (9) должно быть выполнено для того, чтобы правая и левая части уравнения (12) совпадали. Согласно предположению 2, это отрицательно определенная квадратичная форма (а именно,), подразумевающая существование интеграла, который легко вычисляется 



Уравнение (8) также можно записать в виде
-
 (13)
(13)
где филиал

выбирается следующим образом

Рассмотрим важные частные случаи:
- Если S ( x) является действительным знаком для действительного x и x 0 в R n (он же многомерный метод Лапласа), то

- Если S ( x) чисто мнимый для действительного x (т. Е. Для всех x в R n) и x 0 в R n (также известный как метод многомерной стационарной фазы), то


- где обозначает сигнатуру матрицы, равную количеству отрицательных собственных значений минус количество положительных. Примечательно, что в приложениях метода стационарной фазы к многомерному ВКБ-приближению в квантовой механике (а также в оптике) Ind связан с индексом Маслова, см., Например, Chaichian amp; Demichev (2001) и Schulman (2005).


Случай кратных невырожденных седловых точек
Если функция S ( x) имеет несколько изолированных невырожденных седловых точек, т. Е.

куда

приведено открытое покрытие из Ом х, то вычисление интегральной асимптотики сводятся к случаю одной седловой точки посредством использования разбиения единицы. Разбиение единицы позволяет построить множество непрерывных функций р к ( х): Ω х → [0, 1], 1 ≤ K ≤ K, такой, что

Откуда,

Следовательно, при λ → ∞ имеем:

где уравнение (13) использовалось на последнем этапе, а предэкспоненциальная функция f ( x) по крайней мере должна быть непрерывной.
Остальные случаи
Когда ∇ S ( z 0) = 0 и, точка z 0 ∈ C n называется вырожденной седловой точкой функции S ( z). 
Вычисление асимптотики

когда λ → ∞, функция f ( x) непрерывна и S ( z) имеет вырожденную седловую точку, это очень сложная задача, решение которой во многом опирается на теорию катастроф. Здесь теория катастроф заменяет лемму Морса, справедливую только в невырожденном случае, для преобразования функции S ( z) в одно из множества канонических представлений. Подробнее см., Например, Poston amp; Stewart (1978) и Fedoryuk (1987).
Интегралы с вырожденными седловыми точками естественным образом появляются во многих приложениях, включая оптические каустики и многомерное ВКБ-приближение в квантовой механике.
Другие случаи, такие как, например, f ( x) и / или S ( x), являются разрывными или когда экстремум S ( x) находится на границе области интеграции, требуют особой осторожности (см., Например, Fedoryuk (1987) и Вонг (1989)).
Расширения и обобщения
Расширением метода наискорейшего спуска является так называемый метод нелинейной стационарной фазы / наискорейшего спуска. Здесь вместо интегралов необходимо асимптотически оценивать решения задач факторизации Римана – Гильберта.
Учитывая контур C в комплексной сфере, функцию f, определенную на этом контуре и особую точку, скажем бесконечность, ищется функция M, голоморфная вдали от контура C, с заданным скачком через C и с заданной нормализацией на бесконечности. Если f и, следовательно, M являются матрицами, а не скалярами, это проблема, которая, как правило, не допускает явного решения.
Тогда возможна асимптотическая оценка в соответствии с методом линейной стационарной фазы / наискорейшего спуска. Идея состоит в том, чтобы асимптотически свести решение данной проблемы Римана – Гильберта к решению более простой, явно решаемой проблемы Римана – Гильберта. Теорема Коши используется для обоснования деформаций контура скачка.
Нелинейная стационарная фаза была введена Дейфтом и Чжоу в 1993 году на основе более ранней работы русского математика Александра Итца. (Собственно говоря) нелинейный метод наискорейшего спуска был введен Камвиссисом, К. Маклафлином и П. Миллером в 2003 году на основе предыдущей работы Лакса, Левермора, Дейфта, Венакидеса и Чжоу. Как и в линейном случае, контуры наискорейшего спуска решают задачу минимума-максимума. В нелинейном случае они оказываются «S-образными кривыми» (определенными в другом контексте еще в 80-х годах Шталем, Гончаром и Рахмановым).
Метод нелинейной стационарной фазы / наискорейшего спуска имеет приложения к теории солитонных уравнений и интегрируемым моделям, случайным матрицам и комбинаторике.
Смотрите также
Примечания
использованная литература
- Чайчян, М.; Демичев А. (2001), Интегралы по траекториям в физике, том 1: Стохастический процесс и квантовая механика, Тейлор и Фрэнсис, с. 174, ISBN 075030801X
- Дебай, П. (1909), "Näherungsformeln für die Zylinderfunktionen für große Werte des Arguments und unbeschränkt veränderliche Werte des Index", Mathematische Annalen, 67 (4): 535–558, doi : 10.1007 / BF01450097 Английский перевод в Дебай, Питер Дж. У. (1954), Сборник статей Питера Дж. В. Дебая, Interscience Publishers, Inc., Нью-Йорк, ISBN 978-0-918024-58-9, Руководство по ремонту 0063975
- Deift, P.; Чжоу, X. (1993), "Метод наискорейшего спуска для осцилляторных задач Римана-Гильберта. Асимптотика для уравнения MKdV", Ann. математики., Анналы математики, Vol. 137, No. 2, 137 (2), стр. 295–368, arXiv : math / 9201261, doi : 10.2307 / 2946540, JSTOR 2946540.
- Эрдели А. (1956), Асимптотические разложения, Дувр..
- Федорюк, М.В. (2001) [1994], "Метод перевала", Энциклопедия математики, EMS Press.
- Федорюк М. В. Асимптотика: интегралы и ряды, Наука, М., 1987. [на русском].
- Kamvissis, S.; McLaughlin, KT-R.; Миллер, П. (2003), "Полуклассические солитонные ансамбли для фокусирующего нелинейного уравнения Шредингера", Annals of Mathematics Studies, Princeton University Press, 154.
- Риман, Б. (1863), Sullo svolgimento del quoziente di due serie ipergeometriche in frazione contina infinita (Неопубликованная заметка, воспроизведенная в сборнике статей Римана.)
- Siegel, CL (1932), "Uber Riemanns Nachlaß zur analytischen Zahlentheorie", Quellen und Studien zur Geschichte der Mathematik, Astronomie und Physik, 2: 45–80Перепечатано в Gesammelte Abhandlungen, Vol. 1. Берлин: Springer-Verlag, 1966.
- Переведено на Deift, Перси; Чжоу, Синь (2018), «О Riemanns Nachlass для аналитической теории чисел: перевод Uber Зигеля», arXiv : 1810.05198 [ math.HO ].
- Постон, Т.; Стюарт И. (1978), Теория катастроф и ее приложения, Pitman.
- Шульман, LS (2005), "Глава 17: Фаза квазиклассической амплитуды", Методы и приложения интеграции путей, Дувр, ISBN 0486445283
- Вонг Р. (1989), Асимптотические приближения интегралов, Academic Press.
