
Войти
A Соединение с четырьмя стержнями, также называемое четырехзвенное соединение, является простейшим подвижным замкнутая цепь связь. Он состоит из четырех корпусов, называемых стержнями или звеньями, соединенных в петлю четырьмя шарнирами. Как правило, шарниры имеют такую конфигурацию, что звенья движутся в параллельных плоскостях, и сборка называется плоской четырехзвенной связью. Сферические и пространственные четырехзвенные рычаги также существуют и используются на практике.
 Основным механизмом Pumpjacks является четырехзвенный рычажный механизм
Основным механизмом Pumpjacks является четырехзвенный рычажный механизм  Кривые соединительной муфты четырехзвенного рычага кривошипно-коромысла. Моделирование выполнено с помощью MeKin2D.
Кривые соединительной муфты четырехзвенного рычага кривошипно-коромысла. Моделирование выполнено с помощью MeKin2D. Плоские четырехзвенные связи состоят из четырех звеньев, соединенных в петлю четырьмя шарнирами с одной степенью свободы. Соединение может быть поворотным, то есть шарнирным соединением, обозначенным R, или призматическим, подвижным соединением, обозначенным P.
Звено, соединенное с землей шарнирным соединением, обычно называется кривошип. Линия, соединенная с землей призматическим соединением, называется ползуном. Слайдеры иногда считаются кривошипами, у которых шарнирный шарнир находится на очень большом расстоянии перпендикулярно движению ползуна.
Звено, соединяющее два кривошипа, называется плавающим звеном или муфтой. Муфта, соединяющая кривошип и ползун, часто называется шатун.
. Существует три основных типа планарной четырехзвенной связи в зависимости от использования поворотных или призматических шарниров:
Плоские четырехзвенные рычаги важны механизмы найдены в машинах. кинематика и динамика плоских четырехзвенных рычагов являются важными темами в машиностроении.
Планарные четырехзвенные рычаги могут быть разработаны для управления широким спектром движений.
Планарный четырехугольный рычажный механизм, рычаги RRRR или 4R имеют четыре вращающихся шарнира. Одно звено цепи обычно фиксируется и называется заземляющим звеном, фиксированным звеном или рамой. Две связи, подключенные к фрейму, называются заземленными связями и обычно являются входными и выходными ссылками системы, иногда называемыми входными и выходными ссылками. Последнее звено - это плавающее звено, которое также называют соединительной муфтой или шатуном, потому что оно соединяет вход с выходом.
Предполагая, что рамка горизонтальна, есть четыре возможности для входных и выходных звеньев:
Некоторые авторы не различают типы качелей.
Условие Грасгофа для четырехзвенной связи: если сумма самого короткого и самого длинного звена плоской четырехугольной связи меньше или равна сумме оставшихся два звена, то самое короткое звено может полностью вращаться относительно соседнего звена. Другими словами, условие выполняется, если S + L ≤ P + Q, где S - самая короткая ссылка, L - самая длинная, а P и Q - другие ссылки.
Движение четырехстороннего рычага можно разделить на восемь случаев в зависимости от размеров его четырех звеньев. Пусть a, b, g и h обозначают длины входного кривошипа, выходного кривошипа, заземляющего звена и плавающего звена соответственно. Затем мы можем построить три члена:
 ;
; ;
; .
.Движение четырехугольного рычага можно разделить на восемь типов на основе на положительных и отрицательных значениях этих трех терминов: T 1, T 2 и T 3.
 |  |  | Условие Грасгофа | Входная ссылка | Выходная ссылка |
|---|---|---|---|---|---|
| − | − | + | Грасхоф | Кривошип | Кривошип |
| + | + | + | Grashof | Кривошип | Rocker |
| + | − | − | Grashof | Rocker | Crank |
| − | + | − | Grashof | Rocker | Rocker |
| − | − | − | Non-Grashof | 0-Rocker | 0-Rocker |
| − | + | + | Non-Grashof | π -Rocker | π-Rocker |
| + | − | + | Non-Grashof | π-Rocker | 0-Rocker |
| + | + | − | Non-Grashof | 0-Rocker | π-Rocker |
Случаи T 1 = 0, T 2 = 0 и T 3 = 0 являются i Интересно, потому что связи складываются. Если выделить складывающуюся четырехугольную навеску, то существует 27 различных случаев.
На рисунке показаны примеры различных случаев плоского четырехстороннего рычажного механизма.

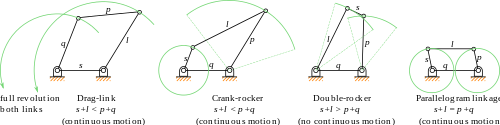 Типы четырехзвенных рычагов, s: кратчайшее звено, l: самое длинное звено.
Типы четырехзвенных рычагов, s: кратчайшее звено, l: самое длинное звено. Конфигурация четырехстороннего рычажного механизма может можно разделить на три типа: выпуклые, вогнутые и пересекающиеся. В выпуклом и вогнутом случаях никакие два звена не пересекают друг друга. В перекрестном соединении два звена пересекаются друг с другом. В выпуклом случае все четыре внутренних угла меньше 180 градусов, а в вогнутой конфигурации один внутренний угол больше 180 градусов. Между длинами двух диагоналей четырехугольника существует простое геометрическое соотношение. Для выпуклых и перекрестных связей длина одной диагонали увеличивается тогда и только тогда, когда другая уменьшается. С другой стороны, для невыпуклых непересекающихся связей все обстоит наоборот; одна диагональ увеличивается тогда и только тогда, когда другая тоже увеличивается.
Синтез или конструкция механизмов с четырьмя стержнями важна, когда стремясь произвести желаемое выходное движение для определенного входного движения. Чтобы свести к минимуму стоимость и максимизировать эффективность, проектировщик выберет самый простой из возможных механизмов для выполнения желаемого движения. При выборе типа механизма, который будет спроектирован, длины звеньев должны определяться с помощью процесса, называемого размерным синтезом. Синтез измерений включает в себя методологию повторения и анализа, которая в определенных обстоятельствах может оказаться неэффективным процессом; однако в уникальных сценариях точные и подробные процедуры для разработки точного механизма могут не существовать.
Временной коэффициент (Q) механизма с четырьмя стержнями является мерой его быстрый возврат и определяется следующим образом:

В механизмах с четырьмя стержнями есть два хода, прямой и возвратный, которые при сложении образуют цикл. Каждый ход может быть идентичным или иметь разную среднюю скорость. Отношение времени численно определяет, насколько быстро прямой ход по сравнению с более быстрым обратным ходом. Общее время цикла (Δtцикл) для механизма составляет:

Большинство механизмов с четырьмя стержнями приводится в движение приводом вращения или кривошипом, для которого требуется определенная постоянная скорость. Эта требуемая скорость (ω кривошип) связана со временем цикла следующим образом:

Некоторые механизмы, производящие возвратно-поступательное или повторяющееся движение, предназначены для создания симметричного движения. То есть, ход машины вперед движется с той же скоростью, что и обратный ход. Эти механизмы, которые часто называют линейными, обычно работают в обоих направлениях, так как они оказывают одинаковое усилие в обоих направлениях.
Примеры механизмов симметричного движения включают:
В других приложениях требуется, чтобы проектируемый механизм имел более высокую среднюю скорость в одном направлении, чем в другом. Эта категория механизмов наиболее желательна для проектирования, когда требуется работа только в одном направлении. Скорость, с которой работает этот один ход, также очень важна для определенных машин. Как правило, возвратный и неинтенсивный гребок должен выполняться как можно быстрее. Таким образом, большая часть времени в каждом цикле отводится на интенсивный гребок. Эти механизмы быстрого возврата часто называют смещением.
Примеры механизмов смещения включают:
С механизмами смещения это очень важно чтобы понять, как и в какой степени смещение влияет на соотношение времени. Чтобы связать геометрию конкретной связи с синхронизацией хода, используется угол дисбаланса (β). Этот угол связан с соотношением времени Q следующим образом:

Путем простой алгебраической перестановки это уравнение можно переписать так, чтобы найти β:

Временные диаграммы часто используются для синхронизации движения между двумя или более механизмы. Они графически отображают информацию, показывающую, где и когда каждый механизм неподвижен или выполняет свои прямые и обратные ходы. Временные диаграммы позволяют проектировщикам качественно описать требуемое кинематическое поведение механизма.
Эти диаграммы также используются для оценки скоростей и ускорений определенных четырехзвенных звеньев. Скорость ссылки - это временная скорость, с которой его позиция изменяется, а ускорение ссылки - это временная скорость, с которой изменяется его скорость. И скорость, и ускорение являются векторными величинами, поскольку они имеют и величину, и направление ; однако в временных диаграммах используются только их величины. При использовании с двумя механизмами временные диаграммы предполагают постоянное ускорение. Это предположение дает полиномиальные уравнения для скорости как функции времени. Постоянное ускорение позволяет отображать график зависимости скорости от времени в виде прямых линий, тем самым определяя взаимосвязь между смещением (ΔR), максимальной скоростью (v пик), ускорением (a), и время (Δt). Следующие уравнения показывают это.
Учитывая перемещение и время, максимальную скорость и ускорение каждого механизма в данном пара может быть рассчитана.
 Кривошипно-шатунный механизм с эксцентриситетом 0 и 1,25.
Кривошипно-шатунный механизм с эксцентриситетом 0 и 1,25. Ползунок-кривошипно-шатунный рычажный механизм представляет собой четырехзвенный рычажный механизм с тремя поворотными шарнирами и одним призматическим, или раздвижные, шарнирные. Вращение рукоятки кривошипа приводит в действие линейное движение ползуна, или расширение газов против скользящего поршня в цилиндре может приводить во вращение кривошипа.
Есть два типа кривошипов: рядные и смещенные.
Если рычажный механизм имеет четыре шарнирных соединения с осями, расположенными под углом для пересечения в одной точке, то звенья перемещаются по концентрическим сферам и сборка называется сферической четырехзвенной связью. Уравнения ввода-вывода сферической четырехзвенной связи могут быть применены к пространственным четырехзвенным связям, когда переменные заменены двойными числами.
Связь Беннета представляет собой пространственную четырехзвенную связь с шарнирными соединениями оси которых наклонены особым образом, что делает систему подвижной.

Универсальный шарнир.

Рулевое управление трактора

Четырехрычажная навеска Bennett.













Коромысло-рычаг останавливается предельные положения и при минимальном / максимальном угле передачи

Неподвижные и подвижные центроды четырехзвенного рычага

Муфта аналога кривошипно-коромысла четырехзвенного

четырехзвенного рулевого механизма (Акермана)

Генератор функции с четырьмя стержнями

Тяги с четырьмя звеньями поворотной муфты

Параллельные звенья с четырьмя звеньями

Gallo ходовой (дельтовидный или воздушный змей) четырехрычажный рычажный механизм

Четырехрычажный рычажный механизм с раскладывающимся рычагом и коромыслом
| На Wikimedia Commons есть материалы, относящиеся к Связи с четырьмя стержнями. |