
Войти
 Карданный шарнир
Карданный шарнир A универсальный шарнир (универсальная муфта, Карданный шарнир, Cardan сустав, Spicer или Hardy Spicer сустав, или сустав Хука ) представляет собой шарнир или муфту, соединяющую жесткие стержни, оси которых наклонены друг к другу, и обычно используется в валах, передающих вращательное движение. Он состоит из пары петель, расположенных близко друг к другу, ориентированных под углом 90 ° друг к другу, соединенных поперечным валом. Карданный шарнир не является шарниром равных углов .
 Воспроизвести медиа В этом видео показаны различные детали и работа карданного вала.
Воспроизвести медиа В этом видео показаны различные детали и работа карданного вала. Основная концепция универсального шарнира основан на конструкции подвесов, которые использовались с древних времен. Одним из ожиданий универсального шарнира было его использование древними греками на баллистах. В Европе универсальный шарнир часто называют шарниром Кардано или карданным валом, в честь итальянского математика Джероламо Кардано ; однако в своих трудах он упомянул только карданные опоры, а не универсальные шарниры.
Механизм был позже описан в Technica curiosa sive mirabilia artis (1664) Гаспаром Шоттом, который ошибочно утверждал, что это был шарнир равных углов . Вскоре после этого, между 1667 и 1675 годами, Роберт Гук проанализировал сустав и обнаружил, что его скорость вращения была неоднородной, но это свойство можно было использовать для отслеживания движения тени на лицевой стороне солнечных часов. Фактически, компонент уравнения времени, который учитывает наклон экваториальной плоскости относительно эклиптики, полностью аналогичен математическому описанию универсального шарнира. Первое зарегистрированное использование термина универсальный шарнир для этого устройства было Гук в 1676 году в его книге «Гелиоскопы». Он опубликовал описание в 1678 году, в результате чего термин «сустав Гука» стал использоваться в англоязычном мире. В 1683 году Гук предложил решение проблемы неоднородной скорости вращения универсального шарнира: пара шарниров Гука, сдвинутых по фазе на 90 ° на обоих концах промежуточного вала, теперь известна как тип постоянных- Карданный шарнир. Кристофер Польхем из Швеции позже заново изобрел универсальный шарнир, в результате чего на шведском языке появилось название Polhemsknut («узел Polhem»).
В 1841 году английский ученый Роберт Уиллис проанализировал движение карданного шарнира. К 1845 году французский инженер и математик Жан-Виктор Понселе проанализировал движение универсального шарнира с помощью сферической тригонометрии.
Термин универсальный шарнир использовался в 18 веке и был общепринятым. использование в 19 веке. Патент Эдмунда Морвуда 1844 года на машину для нанесения покрытия на металл призывал к универсальному шарниру с таким названием, чтобы компенсировать небольшие ошибки центровки между валами двигателя и прокатного стана. В патенте Эфриама Шэя локомотив 1881 года, например, использовались двойные универсальные шарниры в приводном валу локомотива. Чарльз Амидон использовал карданный шарнир гораздо меньшего размера в своей растяжке, запатентованной в 1884 году. В сферической, вращающейся, высокоскоростной паровой машине Beauchamp Tower использовалась адаптация универсального шарнира примерно 1885 года.
Термин "карданный шарнир" появился позже в английском языке. Многие ранние употребления в XIX веке появляются в переводах с французского или находятся под сильным влиянием французского использования. Примеры включают отчет 1868 года о Exposition Universelle 1867 года и статью о динамометре, переведенную с французского в 1881 году.
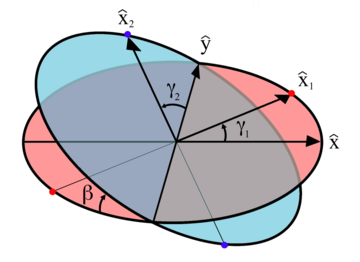 Диаграмма переменных для универсального шарнира. Ось 1 перпендикулярна красной плоскости, а ось 2 всегда перпендикулярна синей плоскости. Эти плоскости расположены под углом β друг к другу. Угловое смещение (положение вращения) каждой оси определяется выражениями
Диаграмма переменных для универсального шарнира. Ось 1 перпендикулярна красной плоскости, а ось 2 всегда перпендикулярна синей плоскости. Эти плоскости расположены под углом β друг к другу. Угловое смещение (положение вращения) каждой оси определяется выражениями  и
и  соответственно, которые представляют собой углы единичных векторов
соответственно, которые представляют собой углы единичных векторов  и
и  относительно их начального положения по осям x и y. и векторы фиксируются подвесом, соединяющим две оси, и поэтому всегда должны оставаться перпендикулярными друг другу.
относительно их начального положения по осям x и y. и векторы фиксируются подвесом, соединяющим две оси, и поэтому всегда должны оставаться перпендикулярными друг другу.  Угловая (вращательная) частота вращения выходного вала
Угловая (вращательная) частота вращения выходного вала  в зависимости от угла поворота
в зависимости от угла поворота  для разных углов изгиба
для разных углов изгиба  шарнира
шарнира 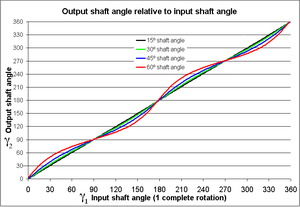 Угол поворота выходного вала,
Угол поворота выходного вала,  , в зависимости от вращения входного вала угол, , для разных углов изгиба, , шарнира
, в зависимости от вращения входного вала угол, , для разных углов изгиба, , шарнира Карданный шарнир страдает одной серьезной проблемой: даже когда ось первичного ведущего вала вращается с постоянной скоростью, ось вторичного ведущего вала вращается с переменной скоростью, что вызывает вибрацию и износ. Изменение скорости ведомого вала зависит от конфигурации шарнира, которая определяется тремя переменными:
угол поворота для ось 1угол поворота оси 2 угол изгиба шарнир или угол между осями относительно друг друга, причем ноль является параллельным или прямым.
угол изгиба шарнир или угол между осями относительно друг друга, причем ноль является параллельным или прямым.Эти переменные показаны на диаграмме справа. Также показан набор фиксированных координатных осей с единичными векторами 



![{\ displaystyle {\ hat {\ mathbf {x}}} _ {1} = \ left [\ cos \ gamma _ {1} \,, \, \ sin \ gamma _ {1} \,, \, 0 \ right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/29b84fdcd5b6bc07d771b025df6ccac73e27c185)
![{\ displaystyle {\ hat {x}} = [1,0,0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0bd3be5ddf79743233234f9f2af9943acc1aa0a7)

![{\ displaystyle {\ hat {\ mathbf {x}}} _ {2} = [- \ cos \ beta \ sin \ гамма _ {2} \,, \, \ соз \ гамма _ {2} \,, \, \ грех \ бета \ грех \ гамма _ {2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e880dc9a98c0dd932d775f23b8bee4642451847d)
Ограничение на

Таким образом, уравнение движения, связывающее два угловых положения, дается следующим образом:

с формальным решением для
![{\ displaystyle \ gamma _ {2} = \ tan ^ {- 1} \ left [{\ frac {\ tan \ gamma _ {1}} {\ cos \ beta}} \ right] \,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4efd57686906137bb9839377919de9311799d024)
Решение для 

Углы 


Как показано на графиках, угловые скорости не связаны линейно, а являются периодическими с периодом, в два раза меньшим, чем у вращающихся валов. Уравнение угловой скорости снова можно дифференцировать, чтобы получить связь между угловыми ускорениями 


 Универсальные шарниры в приводном валу
Универсальные шарниры в приводном валу Конфигурация, известная как частично карданный карданный вал преодолевает проблему резкого вращения. В этой конфигурации используются два карданных шарнира, соединенных промежуточным валом, причем второй карданный шарнир расположен по фазе относительно первого карданного шарнира, чтобы компенсировать изменение угловой скорости. В этой конфигурации угловая скорость ведомого вала будет соответствовать угловой скорости ведущего вала, при условии, что ведущий и ведомый валы находятся под равными углами по отношению к промежуточному валу (но не обязательно в одной плоскости) и что два универсальных шарнира сдвинуты по фазе на 90 градусов. Этот узел обычно используется в транспортных средствах с задним приводом, где он известен как ведущий вал или гребной (гребной) вал.
Даже когда ведущий и ведомый валы находятся под равными углами по отношению к промежуточному валу, если эти углы больше нуля, к трем валам при их вращении прилагаются колебательные моменты. Они имеют тенденцию изгибать их в направлении, перпендикулярном общей плоскости валов. Это прикладывает усилия к опорным подшипникам и может вызвать «вздрагивание» в автомобилях с задним приводом. Промежуточный вал также будет иметь синусоидальную составляющую его угловой скорости, которая способствует вибрации и напряжениям.
Математически это можно представить следующим образом: Если 


Если второй универсальный шарнир повернут на 90 градусов относительно первого, то 


, и видно, что выходной привод сдвинут по фазе с входным валом всего на 90 градусов, что дает привод с постоянной скоростью.
ПРИМЕЧАНИЕ: Базой для измерения углов входного и выходного валов карданного шарнира являются взаимно перпендикулярные оси. Таким образом, вилки промежуточного вала в абсолютном смысле параллельны друг другу. (Поскольку одна вилка действует как вход, а другая вилка действует как выход для валов, и между вилками упоминается разность фаз более 90 градусов.)
Двойной кардан шарнир состоит из двух универсальных шарниров, установленных спина к спине с центральной вилкой; центральная вилка заменяет промежуточный вал. При условии, что угол между входным валом и центральной вилкой равен углу между центральной вилкой и выходным валом, второй карданный шарнир компенсирует погрешности скорости, вносимые первым карданным шарниром, а выровненный двойной карданный шарнир будет действовать как ШРУС.
Муфта Томпсона представляет собой усовершенствованный вариант двойного карданного шарнира. Он предлагает немного повышенную эффективность, за исключением значительного увеличения сложности.