
Войти
Кинематика - это подполе физики, разработанный в классической механике, который описывает движение точек, тел (объектов) и систем тел (групп объектов) без учета сил, которые заставляют их двигаться. Кинематика, как область исследований, часто упоминается как «геометрия движения» и иногда рассматривается как раздел математики. Проблема кинематики начинается с описания геометрии системы и объявления начальных условий любых известных значений положения, скорости и / или ускорения точек в системе. Затем, используя аргументы из геометрии, можно определить положение, скорость и ускорение любых неизвестных частей системы. Изучение того, как силы действуют на тела, подпадает под действие кинетики, а не кинематики. Дополнительные сведения см. В разделе аналитическая динамика.
Кинематика используется в астрофизике для описания движения небесных тел и совокупностей таких тел. В машиностроении, робототехнике и биомеханике кинематика используется для описания движения систем, состоящих из соединенных частей (многосвязных систем), таких как двигатель, роботизированная рука или человеческий скелет.
Геометрические преобразования, также называемые жесткими преобразованиями, используются для описания движения компонентов в механическая система, упрощающая вывод уравнений движения. Они также являются центральными для динамического анализа.
Кинематический анализ - это процесс измерения кинематических величин, используемых для описания движения. В инженерии, например, кинематический анализ может использоваться для определения диапазона движения для данного механизма и работы в обратном направлении, используя кинематический синтез для разработки механизма для желаемого диапазона движение. Кроме того, кинематика применяет алгебраическую геометрию к изучению механического преимущества механической системы или механизма.
Термин кинематика - это английская версия A.M. Кинематика Ампера, которую он построил из греческого κίνημα kinema («движение, движение»), которое само происходит от κινεῖν kinein («двигаться»).
Кинематика и cinématique связаны с французским словом cinéma, но ни одно из них не является прямым производным от него. Тем не менее, у них действительно есть общее корневое слово, поскольку cinéma произошло от сокращенной формы cinématographe, «кинопроектор и камера», опять же от греческого слова, обозначающего движение, и от греческого γρᾰ́φω grapho («писать»).
 Кинематические величины классической частицы: масса m, положение r, скорость v, ускорение a.
Кинематические величины классической частицы: масса m, положение r, скорость v, ускорение a. Вектор положения r, всегда направлен радиально от начала координат.
Вектор положения r, всегда направлен радиально от начала координат.  Вектор скорости v, всегда касательный к траектории движения.
Вектор скорости v, всегда касательный к траектории движения.  Вектор ускорения a, не параллельный радиальному движению, но смещенный угловым и кориолисовым ускорениями, не касательный к траектории, но смещенный центростремительным и радиальным ускорениями. Кинематические векторы в плоских полярных координатах. Обратите внимание, что установка не ограничена двумерным пространством, а плоскостью в любом более высоком измерении.
Вектор ускорения a, не параллельный радиальному движению, но смещенный угловым и кориолисовым ускорениями, не касательный к траектории, но смещенный центростремительным и радиальным ускорениями. Кинематические векторы в плоских полярных координатах. Обратите внимание, что установка не ограничена двумерным пространством, а плоскостью в любом более высоком измерении. Кинематика частиц - это исследование траектории частиц. Положение частицы определяется как вектор координат от начала координатной системы до частицы. Например, представьте себе башню в 50 м к югу от вашего дома, где система координат центрирована в вашем доме, так что восток находится в направлении оси x, а север - в направлении оси y, тогда координата вектор к основанию башни равен r = (0, −50, 0). Если высота башни составляет 50 м, и эта высота измеряется по оси z, то вектор координат до вершины башни равен r = (0, -50, 50) .
В В наиболее общем случае для определения положения частицы используется трехмерная система координат. Однако, если частица вынуждена двигаться в пределах плоскости, двумерной системы координат будет достаточно. Все наблюдения в физике неполны без описания в системе отсчета.
Вектор положения частицы - это вектор , проведенный от начала системы отсчета до частицы. Он выражает как расстояние точки от начала координат, так и направление от начала координат. В трех измерениях положение точки P может быть выражено как

где 











Направляющие косинусы вектора положения обеспечивают количественную меру направления. Важно отметить, что вектор положения частицы не уникален. Вектор положения данной частицы различен относительно разных систем отсчета.
Траектория частицы является векторной функцией времени, 

, где координаты x P, y P и z P - каждая функция времени.
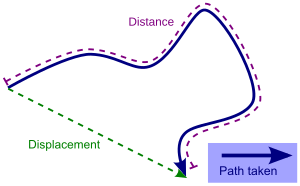 Пройденное расстояние всегда больше или равно смещению.
Пройденное расстояние всегда больше или равно смещению. скорость частицы - это векторная величина, которая описывает величину, а также направление движения частицы. Говоря более математически, скорость изменения вектора положения точки относительно времени - это скорость точки. Рассмотрим соотношение, образованное делением разности двух положений частицы на временной интервал. Это соотношение называется средней скоростью за этот интервал времени и определяется как скорость = смещение / затраченное время

где Δ P - изменение вектора положения за интервал времени Δt.
В пределе, когда интервал времени Δt становится все меньше и меньше, средняя скорость становится производной по времени вектора положения,

Таким образом, скорость - это скорость изменения положения точки во времени, а точка обозначает производная этих функций x, y и z по времени. Кроме того, скорость касательна к траектории частицы в каждом положении, которое частица занимает на своем пути. Обратите внимание, что в невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.
скорость объекта - это величина | V | его скорости. Это скалярная величина:

где s - длина дуги измеряется вдоль траектории частицы. Длина дуги, пройденная частицей с течением времени, не уменьшается. Следовательно, ds / dt неотрицательно, что означает, что скорость также неотрицательна.
Вектор скорости может изменяться по величине и по направлению или по обоим сразу. Следовательно, ускорение учитывает как скорость изменения величины вектора скорости, так и скорость изменения направления этого вектора. То же рассуждение, которое используется в отношении положения частицы для определения скорости, может быть применено к скорости для определения ускорения. ускорение частицы - это вектор, определяемый скоростью изменения вектора скорости. Среднее ускорение частицы за интервал времени определяется как отношение.

где Δ V - разность вектора скорости, а Δt - временной интервал.
Ускорение частицы - это предел среднего ускорения, когда временной интервал приближается к нулю, который является производной по времени,

или

Таким образом, ускорение - это первая производная вектора скорости и вторая производная вектора положения этой частицы. Обратите внимание, что в невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.
Величина ускорения объекта - это величина | A | вектора его ускорения. Это скалярная величина:

A вектор относительного положения - это вектор, определяющий положение одной точки относительно другой. Это разница в положении двух точек. Положение одной точки A относительно другой точки B - это просто разница между их положениями
, который представляет собой разницу между компонентами их векторов положения.
Если точка A имеет компоненты положения
Если точка B имеет компоненты положения
тогда положение точки A относительно точки B - это разница между их компонентами:
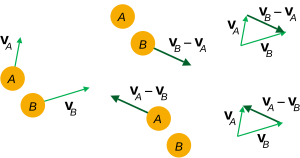 Относительные скорости между двумя частицами в классической механике.
Относительные скорости между двумя частицами в классической механике. Скорость одной точки относительно другой - это просто разница между их скоростями
, которая представляет собой разницу между компонентами их скоростей.
Если точка A имеет компоненты скорости
и точка B имеет компоненты скорости
тогда скорость точки A относительно точки B это разница между их компонентами:
В качестве альтернативы тот же результат может быть получен путем вычисления производной по времени вектора относительного положения RB / A.
В случае, когда скорость близка к скорости света c (обычно в пределах 95%), используется другая схема относительной скорости, называемая быстротой, которая зависит от отношение V к c используется в специальной теории относительности.
Ускорение одной точки C относительно другой точки B - это просто разница между их ускорениями.
который является разница между составляющими их ускорений.
Если точка C имеет компоненты ускорения
и точка B имеет компоненты ускорения
тогда ускорение точки C относительно точки B разница между их компонентами:
В качестве альтернативы тот же результат может быть получен путем вычисления второй производной по времени вектора относительного положения PB / A.
Предполагая, что начальные условия положения, 



Второе интегрирование дает его путь (траекторию),

Можно вывести дополнительные отношения между смещением, скоростью, ускорением и временем. Поскольку ускорение постоянно,
 можно заменить в приведенное выше уравнение, чтобы получить:
можно заменить в приведенное выше уравнение, чтобы получить:
Связь между скоростью, положением и ускорением без явной зависимости от времени может быть получена путем решения среднего ускорения для времени и замены и упрощения


где ∘ обозначает скалярное произведение, что соответствует поскольку продукты являются скалярами, а не векторами.

Точку можно заменить косинусом угла α между векторами и векторами по их величине, в этом случае:

В случае ускорения всегда в направлении движения, и направление движения должно быть положительным или отрицательным, угол между векторами (α) равно 0, поэтому 

Это можно упростить, используя обозначение величин векторов 


Это сводит параметрические уравнения движения частицы к декартовой зависимости скорости от положения. Это соотношение полезно, когда время неизвестно. Мы также знаем, что 
 Физический график скорости / времени
Физический график скорости / времени Мы можем взять 












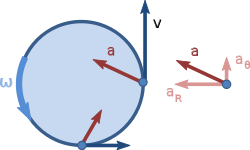 Рисунок 2: Скорость и ускорение для неравномерного кругового движения: вектор скорости тангенциальный к орбите, но вектор ускорения направлен не радиально внутрь из-за его тангенциальной составляющей aθ, которая увеличивает скорость вращения: dω / dt = | aθ| / R.
Рисунок 2: Скорость и ускорение для неравномерного кругового движения: вектор скорости тангенциальный к орбите, но вектор ускорения направлен не радиально внутрь из-за его тангенциальной составляющей aθ, которая увеличивает скорость вращения: dω / dt = | aθ| / R. Часто бывает удобно сформулировать траекторию частицы P (t) = (X (t), Y (t) и Z (t)) с использованием полярных координат в плоскости X – Y. В этом случае его скорость и ускорение принимают удобный вид.
Напомним, что траектория частицы P определяется ее вектором координат P, измеренным в фиксированной системе отсчета F. По мере движения частицы ее вектор координат P (t) отслеживает свою траекторию, которая является кривой в пространстве, заданной следующим образом:

где I, J, K и единичные векторы вдоль осей X, Y и оси Z по опорный кадр F, соответственно.
Рассмотрим частицу P, которая движется только по поверхности кругового цилиндра R (t) = constant, можно совместить ось Z фиксированной системы отсчета F с осью цилиндра. Тогда угол θ вокруг этой оси в плоскости X – Y можно использовать для определения траектории как,

Цилиндрические координаты для P (t) могут быть упрощены путем введения радиального и тангенциального единичных векторов,

и их производные по времени из элементарного исчисления:



 .
.Использование этого примечания ция P (t) принимает форму

где R - константа в случае, если частица движется только по поверхности цилиндра радиуса R.
В общем, траектория P (t) не ограничена лежать на круглом цилиндре, поэтому радиус R изменяется со временем, и траектория частицы в цилиндрическо-полярных координатах принимает вид:

Где R, тета, и Z могут быть непрерывно дифференцируемыми функциями времени, и обозначение функции опускается для простоты. Вектор скорости VPпредставляет собой производную по времени траектории P (t), которая дает:
 .
.Точно так же ускорение AP, которое является производной по времени от скорости VP, равно задается формулой:

Термин 

Если траектория частицы должна лежать на цилиндре, тогда радиус R постоянен, а векторы скорости и ускорения упрощаются. Скорость VPявляется производной по времени траектории P (t),

Вектор ускорения принимает следующий вид:

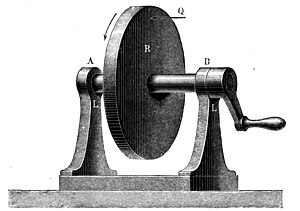 Каждая частица на колесе движется по плоской круговой траектории (кинематика of Machinery, 1876).
Каждая частица на колесе движется по плоской круговой траектории (кинематика of Machinery, 1876). Особый случай траектории частицы на круговом цилиндре возникает, когда нет движения вдоль оси Z:

где R и Z 0 являются константами. В этом случае скорость VPопределяется как:

где

- это угловая скорость единичного вектора eθвокруг оси z цилиндра.
Ускорение APчастицы P теперь определяется следующим образом:

Компоненты

называются, соответственно, радиальной и тангенциальной составляющими ускорения.
Обозначения для угловой скорости и углового ускорения часто определяют как

, поэтому компоненты радиального и тангенциального ускорения для круговых траекторий также записываются как

Движение из компонентов механической системы анализируются путем присоединения а опорный кадр для каждой части, и определение того, как различные системы отсчета движутся относительно друг друга. Если структурная жесткость деталей достаточна, то их деформацией можно пренебречь и использовать жесткие преобразования для определения этого относительного движения. Это сводит описание движения различных частей сложной механической системы к задаче описания геометрии каждой части и геометрической ассоциации каждой части относительно других частей.
Геометрия - это изучение свойств фигур, которые остаются неизменными, пока пространство трансформируется различными способами, а точнее говоря, это изучение инвариантов относительно набора преобразований. Эти преобразования могут вызвать смещение треугольника в плоскости, при этом угол вершины и расстояния между вершинами остаются неизменными. Кинематику часто называют прикладной геометрией, в которой движение механической системы описывается с использованием жестких преобразований евклидовой геометрии.
Координаты точек на плоскости - это двумерные векторы в R (двухмерное пространство). Жесткие преобразования - это такие преобразования, которые сохраняют расстояние между любыми двумя точками. Набор жестких преобразований в n-мерном пространстве называется специальной евклидовой группой на R и обозначается SE (n).
 Движение каждого из компонентов парового двигателя Boulton Watt (1784) моделируется непрерывным набором жестких перемещений.
Движение каждого из компонентов парового двигателя Boulton Watt (1784) моделируется непрерывным набором жестких перемещений. Положение одного компонента механической системы относительно другого определяется введением опорный кадр, скажем M, на одном, который движется относительно фиксированного кадра F, на другом. Жесткое преобразование или смещение M относительно F определяет относительное положение двух компонентов. Смещение состоит из комбинации поворота и смещения.
Набор всех смещений M относительно F называется конфигурационным пространством M. кривая из одного положения в другое в этом конфигурационном пространстве представляет собой непрерывный набор смещений, называемый движением M относительно F. Движение тела состоит из непрерывного набора вращений и перемещений.
Комбинация поворота и сдвига в плоскости R может быть представлена определенным типом матрицы 3x3, известной как однородное преобразование. Однородное преобразование 3x3 строится из матрицы вращения 2x2 A (φ) и вектора сдвига 2x1 d = (d x, d y), как:
![{\displaystyle [T(\phi,\mathbf {d})]={\begin{bmatrix}A(\phi)\mathbf {d} \\01\end{bmatrix}}={\begin{bmatrix}\cos \phi -\sin \phi d_{x}\\\sin \phi \cos \phi d_{y}\\001\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf7c55c3676dc5465e5080d069c2698afcdaa9f4)
Эти однородные преобразования выполняют жесткие преобразования на точки в плоскости z = 1, то есть в точках с координатами p = (x, y, 1).
В частности, пусть p определяет координаты точек в системе отсчета M, совпадающей с фиксированной системой координат F. Затем, когда начало координат M смещается вектором сдвига d относительно начала координат F и повернутые на угол φ относительно оси x F, новые координаты в F точек в M задаются следующим образом:
![{\textbf {P}}=[T(\phi,\mathbf {d})]{\textbf {p}}={\begin{bmatrix}\cos \phi -\sin \phi d_{x}\\\sin \phi \cos \phi d_{y}\\001\end{bmatrix}}{\begin{Bmatrix}x\\y\\1\end{Bmatrix}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/afd8c2abef5c4efdb4c462f4620c487e731db73b)
Однородные преобразования представляют собой аффинные преобразования. Эта формулировка необходима, потому что перевод не является линейным преобразованием R . Однако при использовании проективной геометрии, так что R считается подмножеством R, переводы становятся аффинными линейными преобразованиями.
Если твердое тело движется так, что его система отсчета M не вращается (∅ = 0) относительно неподвижной системы F, движение называется чистым переносом. В этом случае траектория каждой точки тела является смещением траектории d (t) начала координат M, то есть:
![{\textbf {P}}(t)=[T(0,{\textbf {d}}(t))]{\textbf {p}}={\textbf {d}}(t)+{\textbf {p}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b17768bbc7399bbf040eec0df48a1f5850c6ff0)
Таким образом, для тел в чистом перемещении скорость и ускорение каждой точки P в теле задаются следующим образом:

где точка обозначает производную по времени, а VOи AO- это скорость и ускорение, соответственно, начала координат движущейся системы M. Напомним, что вектор координат p в M постоянен, поэтому его производная равна нулю.
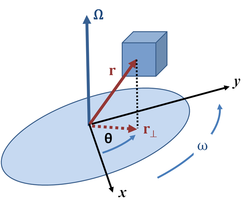 Рисунок 1: Вектор угловой скорости Ω указывает вверх для вращения против часовой стрелки и вниз для вращения по часовой стрелке, как указано в справа -ручное правило. Угловое положение θ (t) изменяется со временем со скоростью ω (t) = dθ / dt.
Рисунок 1: Вектор угловой скорости Ω указывает вверх для вращения против часовой стрелки и вниз для вращения по часовой стрелке, как указано в справа -ручное правило. Угловое положение θ (t) изменяется со временем со скоростью ω (t) = dθ / dt. Вращательная или угловая кинематика - это описание вращения объекта. Описание вращения требует некоторого метода описания ориентации. Общие описания включают в себя углы Эйлера и кинематику поворотов, вызванных алгебраическими произведениями.
Далее внимание ограничивается простым вращением вокруг оси с фиксированной ориентацией. Ось Z выбрана для удобства.
![\mathbf {P} (t)=[A(t)]\mathbf {p},](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
![[A(t)]={\begin{bmatrix}\cos \theta (t)-\sin \theta (t)\\\sin \theta (t)\cos \theta (t)\end{bmatrix}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/94fc0456d06fb0809c059a7254b050dc3418b7a4)
![\mathbf {V} _{P}={\dot {\mathbf {P} }}=[{\dot {A}}(t)]\mathbf {p}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0d7793387eb9ae622071c127994fdb51df9c29c)
![\mathbf {V} _{P}=[{\dot {A}}(t)][A(t)^{-1}]\mathbf {P} =[\Omega ]\mathbf {P},](https://wikimedia.org/api/rest_v1/media/math/render/svg/039da2a7b7b917fb70b30cf2b0fda97ac943071c)
![[\Omega ]={\begin{bmatrix}0-\omega \\\omega 0\end{bmatrix}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)












