Система координат перекоса - это криволинейная система координат, где координатные поверхности не ортогональны, в отличие от ортогональных координат.
Наклонные координаты, как правило, сложнее работать по сравнению с ортогональными координатами, поскольку метрический тензор будет иметь ненулевые недиагональные компоненты, что предотвратит многие упрощения в формулах для тензорной алгебры и тензорного исчисления. Ненулевые недиагональные компоненты метрического тензора являются прямым результатом неортогональности базисных векторов координат, поскольку по определению:

где  - метрический тензор, а
- метрический тензор, а  (ковариантные) базисные векторы.
(ковариантные) базисные векторы.
Эти системы координат могут быть полезны, если геометрия задачи хорошо вписывается в искаженную систему. Например, решить уравнение Лапласа в параллелограмме будет проще всего, если оно будет выполнено с соответствующим перекосом координат.
Содержание
- 1 Декартовы координаты с одной наклонной осью
- 1.1 Алгебра и полезные величины
- 1.2 Исчисление
- 2 Ссылки
Декартовы координаты с одной наклонной осью
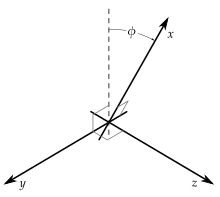
Система координат, в которой x ось была изогнута к оси z.
Простейшим трехмерным случаем наклонной системы координат является декартова система, где одна из осей (скажем, ось x) была изогнута на некоторый угол  , остающийся ортогональным одной из двух оставшихся осей. В этом примере ось x декартовой координаты согнута к оси z на , оставаясь ортогональной оси y.
, остающийся ортогональным одной из двух оставшихся осей. В этом примере ось x декартовой координаты согнута к оси z на , оставаясь ортогональной оси y.
Алгебра и полезные величины
Пусть  ,
,  и
и  соответственно быть единичными векторами вдоль
соответственно быть единичными векторами вдоль  ,
,  и
и  оси. Они представляют собой ковариантный базис; вычисление их скалярных произведений дает следующие компоненты метрического тензора :
оси. Они представляют собой ковариантный базис; вычисление их скалярных произведений дает следующие компоненты метрического тензора :


- количества, которые будут полезны позже.
Контравариантный базис задается следующим образом:



Контравариантный базис не очень удобен в использовании, но он появляется в определениях, поэтому его следует учитывать. Мы предпочтем записывать количества относительно ковариантного базиса.
Поскольку все базисные векторы являются постоянными, сложение и вычитание векторов будут просто привычными покомпонентными сложениями и вычитаниями. Теперь пусть

где суммы означают суммирование по всем значениям индекса (в данном случае, i = 1, 2, 3). Компоненты контравариантной и ковариантной этих векторов могут быть связаны соотношением

так, что явно



скалярное произведение в терминах контравариантных компонентов будет тогда

и в терминах ковариантных компонент
![{\ displaystyle \ mathbf {a} \ cdot \ mathbf {b} = \ cos ^ {2} (\ phi) [a_ {1} b_ {1} + a_ { 2} b_ {2} + a_ {3} b_ {3} - \ sin (\ phi) (a_ {1} b_ {3} + a_ {3} b_ {1})].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ce37e02f1bbb0d21782d062245d9ac294d098f50)
Исчисление
По определению, градиент скалярной функции f равно

где  - это индексированные координаты x, y, z. Распознавая это как вектор, записанный в терминах контравариантного базиса, его можно переписать:
- это индексированные координаты x, y, z. Распознавая это как вектор, записанный в терминах контравариантного базиса, его можно переписать:

расхождение вектора  равно
равно

и тензора 

Лапласиан f равен

и, поскольку ковариантный базис нормальный и постоянный, векторный лапласиан совпадает с покомпонентным лапласианом вектора, записанного в терминах ковариантного базиса.
Хотя и скалярное произведение, и градиент несколько беспорядочно, поскольку в них есть дополнительные члены (по сравнению с декартовой системой), оператор переноса, который объединяет скалярное произведение с градиентом, оказывается очень простым. :

который может применяться к как скалярные, так и векторные функции, покомпонентно, если они выражены в ковариантном базисе.
Наконец, curl вектора равен


Ссылки

 Система координат, в которой x ось была изогнута к оси z.
Система координат, в которой x ось была изогнута к оси z.