круг непосредственно соответствующей кривизны кривой в точке
Оскулирующий круг

Оскулирующие круги
Архимедова спираль, вложенная по
теореме Тейта – Кнезера. «Сама спираль не рисуется: мы видим ее как геометрическое место точек, где окружности особенно близки друг к другу».
В дифференциальной геометрии кривых соприкасающаяся окружность достаточно гладкой плоскости кривая в данной точке p на кривой традиционно определялась как окружность, проходящая через точку p, и пара дополнительных точек на кривой бесконечно близкой к p. Его центр лежит на внутренней нормальной линии, а его кривизна определяет кривизну данной кривой в этой точке. Эта окружность, которая является единственной среди всех касательных окружностей в данной точке, которая наиболее сильно приближается к кривой, назвал circleus osculans (латинское слово "круг поцелуев") Лейбниц.
Центр и радиус соприкасающейся окружности в данной точке называются центром кривизны и радиусом кривизны кривая в этой точке. Геометрическая конструкция была описана Исааком Ньютоном в его Principia :
. В любых местах задана скорость, с которой тело описывает данную фигуру, посредством сил, направленных на некоторые общие центр: найти этот центр.
— Исаак Ньютон, Начала; ПРЕДЛОЖЕНИЕ V. ПРОБЛЕМА I.
Содержание
- 1 Нетехническое описание
- 2 Математическое описание
- 3 Свойства
- 4 Примеры
- 4.1 Парабола
- 4.2 Кривая Лиссажу
- 4.3 Циклоида
- 5 См. Также
- 6 Примечания
- 7 Дополнительная литература
- 8 Внешние ссылки
Нетехническое описание
Представьте себе автомобиль, движущийся по извилистой дороге на обширной равнине. самолет. Внезапно в какой-то момент на дороге рулевое колесо фиксируется в своем текущем положении. После этого машина движется по кругу, «целуя» дорогу в точке блокировки. Кривизна окружности равна кривизне дороги в этой точке. Этот круг представляет собой соприкасающийся круг дорожного поворота в этой точке.
Математическое описание
Пусть  (s) будет регулярной параметрической кривой на плоскости, где s - длина дуги (естественный параметр ). Это определяет единичный касательный вектор T (s), единичный вектор нормали N (s), знаковую кривизну k (s) и радиус кривизны R (s) в каждой точке, для которой составлено s:
(s) будет регулярной параметрической кривой на плоскости, где s - длина дуги (естественный параметр ). Это определяет единичный касательный вектор T (s), единичный вектор нормали N (s), знаковую кривизну k (s) и радиус кривизны R (s) в каждой точке, для которой составлено s:

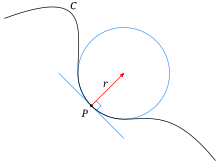
Предположим, что P - точка на γ, где k ≠ 0. Соответствующий центр кривизны - это точка Q на расстоянии R вдоль N в том же направлении, если k положительно и в обратном направлении, если k отрицательно. Окружность с центром в Q и радиусом R называется соприкасающейся окружностью кривой γ в точке P.
Если C - регулярная пространственная кривая, то соприкасающаяся окружность определена в аналогичным образом, используя вектор главной нормали N. Она лежит в соприкасающейся плоскости, плоскости, натянутой на касательную и главные нормали T и N в точке P.
Плоская кривая также может быть задана в другой регулярной параметризации

где обычный означает, что  для все
для все  . Тогда формулы для знаковой кривизны k (t), нормального единичного вектора N (t), радиуса кривизны R (t) и центра Q (t) соприкасающейся окружности равны
. Тогда формулы для знаковой кривизны k (t), нормального единичного вектора N (t), радиуса кривизны R (t) и центра Q (t) соприкасающейся окружности равны


Декартовы координаты
Мы можем получить центр соприкасающейся окружности в декартовых координатах, если подставим  и
и  для некоторой функции f. Если мы проведем вычисления, то результаты для координат X и Y центра соприкасающегося круга будут:
для некоторой функции f. Если мы проведем вычисления, то результаты для координат X и Y центра соприкасающегося круга будут:

Свойства
Для кривой C, заданной достаточно гладкими параметрическими уравнениями (дважды непрерывно дифференцируемыми), соприкасающаяся окружность может быть получена с помощью процедуры ограничения: это предел окружностей, проходящих через три различные точки на C по мере приближения этих точек к P. Это полностью аналогично построению касательной к кривой как предел секущих линий через пары различных точек на C, приближающихся к P.
Прилегающая окружность S к плоской кривой C в регулярной точке P может быть охарактеризована следующими свойствами:
- Окружность S проходит через P.
- Окружность S и кривая C имеют общую касательную линию в точке P, и перед общей нормальной линией.
- Ближе к P расстояние между точками кривой C и окружности S в нормальном направлении уменьшается как куб или более высокая степень расстояния до P в тангенциальном направлении.
Обычно это выражается как «кривая и ее соприкасающийся круг имеют второй или более высокий порядок контакт » в точке P. Грубо говоря, векторные функции, представляющие C и S, согласуются вместе с их первым и вторым производные в точке P.
Если производная кривизны по s отлична от нуля в точке P, то соприкасающаяся окружность пересекает кривую C в точке P. Точки P, в которых производная кривизны равна нулю, называются вершины. Если P - вершина, то C и его соприкасающаяся окружность контактируют не менее третьего порядка. Если, кроме того, кривизна имеет ненулевой локальный максимум или минимум в точке P, тогда соприкасающийся круг касается кривой C в точке P, но не пересекает ее.
Кривая C может быть получена как огибающая однопараметрического семейства ее соприкасающихся окружностей. Их центры, то есть центры кривизны, образуют другую кривую, называемую эволютой кривой C. Вершины кривой C соответствуют особым точкам на ее эволюции.
Внутри любой дуги кривой C, внутри которой кривизна является монотонной (т. Е. От любой вершины кривой), соприкасающиеся круги не пересекаются и вложены друг в друга. Этот результат известен как теорема Тейта-Кнезера.
Примеры
Парабола

Прилегающая окружность параболы в ее вершине имеет радиус 0,5 и контакт четвертого порядка.
Для параболы

радиус кривизны равен

В вершине  радиус кривизны равен R (0) = 0,5 (см. рисунок). Здесь парабола имеет контакт четвертого порядка со своим соприкасающимся кругом. При больших t радиус кривизны увеличивается ~ t, т. Е. Кривая все больше выпрямляется.
радиус кривизны равен R (0) = 0,5 (см. рисунок). Здесь парабола имеет контакт четвертого порядка со своим соприкасающимся кругом. При больших t радиус кривизны увеличивается ~ t, т. Е. Кривая все больше выпрямляется.
Кривая Лиссажу

A Кривая Лиссажу с соотношением частот (3: 2) может быть параметризована следующим образом

Он имеет кривизну со знаком k ( t), нормальный единичный вектор N (t) и радиус кривизны R (t), определяемые как


и

См. Рисунок для анимации. Здесь "вектор ускорения" является второй производной  относительно длины дуги
относительно длины дуги  .
.
Циклоида

Циклоида (синий), ее соприкасающийся круг ( красный) и эволютный (зеленый).
A циклоида с радиусом r может быть параметризована следующим образом:

Его кривизна задается следующей формулой:

что дает:

См. также
Примечания
- ^ Гиз, Этьен ; Табачников Сергей ; Тиморин, Владлен (2013). «Оскулирующие кривые: вокруг теоремы Тейта-Кнезера». Математический интеллект. 35 (1): 61–66. arXiv : 1207.5662. doi : 10.1007 / s00283-012-9336-6. MR 3041992. S2CID 18183204.
- ^Фактически, точка P плюс две дополнительные точки, по одной по обе стороны от P. См. Lamb (on line): Horace Lamb (1897). Элементарный курс исчисления бесконечно малых. University Press. п. 406.
соприкасающийся круг.
- ^Вайсштейн, Эрик У. «Циклоида». MathWorld.
Дополнительная литература
Некоторые исторические заметки по изучению кривизны см. В
- Grattan-Guinness H. J. M. Bos (2000). От исчисления к теории множеств 1630-1910: Введение в историю. Издательство Принстонского университета. п. 72. ISBN 0-691-07082-2.
- Рой Портер, редактор (2003). Кембриджская история науки: v4 - Наука восемнадцатого века. Издательство Кембриджского университета. п. 313. ISBN 0-521-57243-6.
Для применения к маневрирующим транспортным средствам см.
- Дж. К. Александер и Дж. Х. Мэддокс (1988): О маневрировании транспортных средств doi : 10.1137 / 0148002
- Мюррей С. Кламкин (1990). Задачи по прикладной математике: отрывки из обзора SIAM. Общество промышленной и прикладной математики. п. 1. ISBN 0-89871-259-9.
Внешние ссылки
 | Викискладе есть медиафайлы, связанные с Оскулирующими кругами. |

 Оскулирующий круг
Оскулирующий круг  Оскулирующие круги Архимедова спираль, вложенная по теореме Тейта – Кнезера. «Сама спираль не рисуется: мы видим ее как геометрическое место точек, где окружности особенно близки друг к другу».
Оскулирующие круги Архимедова спираль, вложенная по теореме Тейта – Кнезера. «Сама спираль не рисуется: мы видим ее как геометрическое место точек, где окружности особенно близки друг к другу».  Прилегающая окружность параболы в ее вершине имеет радиус 0,5 и контакт четвертого порядка.
Прилегающая окружность параболы в ее вершине имеет радиус 0,5 и контакт четвертого порядка. 
 Циклоида (синий), ее соприкасающийся круг ( красный) и эволютный (зеленый).
Циклоида (синий), ее соприкасающийся круг ( красный) и эволютный (зеленый).