
Войти
Проверка и согласование данных промышленного процесса или, короче, проверка и согласование данных (DVR) - это технология, которая использует информацию о процессе и математические методы для автоматического обеспечения проверки данных и согласования путем корректировки измерений в промышленных процессах. Использование цифрового видеорегистратора позволяет извлекать точную и надежную информацию о состоянии промышленных процессов из необработанных данных измерений и дает единый согласованный набор данных, представляющих наиболее вероятную операцию процесса.
Промышленные процессы, например, химические или термодинамические процессы на химических заводах, нефтеперерабатывающих заводах, объектах добычи нефти или газа или электростанциях часто представлены двумя основными способами:
Модели могут иметь разные уровни детализации, например, можно nвключайте простые массы или составные балансы сохранения или более продвинутые термодинамические модели, включая законы сохранения энергии. Математически модель может быть выражена нелинейной системой уравнений 

Нормально распределенные измерения без смещения.
Нормально распределенные измерения со смещением.
Данные обычно происходят из измерений, выполненных в разных местах на промышленной площадке, например, измерения температуры, давления, объемного расхода и т. Д. Чтобы понять основные принципы DVR, важно сначала осознать, что Измерения растений никогда не бывают правильными на 100%, т.е. исходные измерения 

Случайные ошибки означает, что измерение 



К другим источникам ошибок при расчете балансов предприятия относятся технологические сбои, такие как утечки, немоделированные тепловые потери, неправильные физические свойства или другие физические параметры, используемые в уравнениях, а также неправильная структура, такая как немоделированные байпасные линии. Другие ошибки включают немоделированную динамику предприятия, такую как изменения задержек, и другие нестабильности в работе предприятия, которые нарушают стационарные (алгебраические) модели. Дополнительные динамические ошибки возникают, когда измерения и образцы не берутся одновременно, особенно лабораторные анализы.
Обычная практика использования средних значений по времени для ввода данных частично снижает динамические проблемы. Однако это не полностью устраняет несоответствия по времени для нечасто отбираемых данных, таких как лабораторные анализы.
Такое использование средних значений, таких как скользящее среднее, действует как фильтр нижних частот, поэтому высокочастотный шум в основном устраняется. В результате на практике сверка данных в основном заключается в корректировке систематических ошибок, таких как смещения.
ISA-95 - международный стандарт для интеграции корпоративных систем и систем управления. В нем утверждается, что:
Согласование данных - серьезная проблема для интеграции системы управления предприятием.. Данные должны быть действительными, чтобы быть полезными для корпоративной системы. Данные часто необходимо определять на основе физических измерений, которые связаны с факторами погрешности. Обычно это необходимо преобразовать в точные значения для корпоративной системы. Это преобразование может потребовать ручного или интеллектуального согласования преобразованных значений [...]. Необходимо настроить системы, чтобы гарантировать отправку точных данных в производство и из производства. Непреднамеренные ошибки оператора или технические ошибки могут привести к слишком большому объему производства, слишком низкому производству, неправильному производству, неправильному инвентаризации или отсутствию инвентаря.
Цифровые видеорегистраторы становятся все более важными из-за производственных процессов становится все более и более сложным. DVR начался в начале 1960-х годов с приложений, направленных на закрытие материальных остатков в производственных процессах, где были доступны исходные измерения для всех переменных. При этом была поставлена задача выявления и устранения грубой ошибки . В конце 1960-х и 1970-х годах неизмеряемые переменные учитывались в процессе согласования данных. DVR также стал более зрелым благодаря рассмотрению общих систем нелинейных уравнений, исходящих из термодинамических моделей. Были введены квазистационарная динамика для фильтрации и одновременной оценки параметров во времени. в 1977 году Стэнли и Мах. Динамический DVR был сформулирован как задача нелинейной оптимизации Либманом и др. в 1992 г.
Согласование данных - это метод, нацеленный на исправление ошибок измерения, вызванных шумом измерения, то есть случайных ошибок. Со статистической точки зрения основное предположение состоит в том, что в наборе измерений не существует систематических ошибок , поскольку они могут искажать результаты согласования и снижать надежность согласования.
Учитывая 

где 










Термин 

Другими словами, нужно минимизировать общую поправку (измеренную методом наименьших квадратов), которая необходима для удовлетворения системных ограничений. Кроме того, каждый член наименьших квадратов взвешивается по стандартному отклонению соответствующего измерения. Стандартное отклонение связано с точностью измерения. Например, при уровне достоверности 95% стандартное отклонение составляет примерно половину точности.
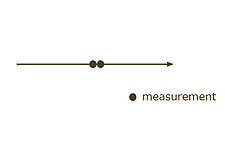
Резервирование датчика возникает из-за наличия нескольких датчиков одного и того же количества в одно и то же время в одном месте.
Топологическая избыточность, возникающая из информации модели, с использованием ограничения сохранения массы 



Согласование данных в значительной степени опирается на концепцию избыточности, чтобы как можно меньше корректировать измерения, чтобы удовлетворить ограничения процесса. Здесь избыточность определяется иначе, чем избыточность в теории информации. Вместо этого избыточность возникает из объединения данных датчика с моделью (алгебраические ограничения), иногда более конкретно называемого «пространственной избыточностью», «аналитической избыточностью» или «топологической избыточностью».
Избыточность может быть связана с избыточностью датчика, когда датчики дублируются, чтобы иметь более одного измерения одной и той же величины. Избыточность также возникает, когда одна переменная может быть оценена несколькими независимыми способами из отдельных наборов измерений в заданное время или период усреднения по времени с использованием алгебраических ограничений.
Избыточность связана с концепцией наблюдаемости. Переменная (или система) является наблюдаемой, если модели и измерения датчиков могут использоваться для однозначного определения ее значения (состояния системы). Датчик считается избыточным, если его удаление не приводит к потере наблюдаемости. Строгое определения наблюдаемости, вычислимости и избыточности, а также критерии ее определения были установлены Стэнли и Махом для этих случаев с установленными ограничениями, такими как алгебраические уравнения и неравенства. Далее мы проиллюстрируем некоторые особые случаи:
Топологическая избыточность тесно связана со степенями свободы (

Говоря о топологической избыточности, мы должны различать измеряемые и неизмеряемые переменные. Далее обозначим через 





т.е. избыточность - это разница между количеством уравнений 

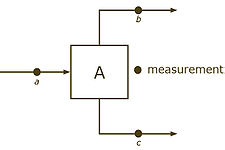
Простой подсчет переменных, уравнений и измерений неадекватен для многих систем, нарушается по нескольким причинам: (a) Части системы могут иметь избыточность, а другие нет, а некоторые части могут даже не быть возможно вычислить, и (b) нелинейности могут привести к различным выводам в разных рабочих точках. В качестве примера рассмотрим следующую систему с 4 потоками и 2 модулями.
Вычислительная система, от 

невычислимая система, зная, что
Мы включаем только ограничения сохранения потока и получаем 


Если у нас есть измерения для
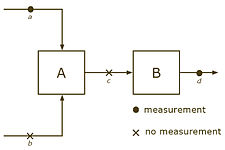
В 1981 году критерии наблюдаемости и избыточности были доказаны для такого рода потоковых сетей, включающих только ограничения баланса массы и энергии. После объединения всех входов и выходов объекта в «узел среды» потеря наблюдаемости соответствует циклам неизмеряемых потоков. Это видно во втором случае выше, когда потоки a и b находятся в цикле неизмеренных потоков. Далее следует классификация избыточности путем тестирования пути неизмеренных потоков, поскольку это привело бы к неизмеряемому циклу, если бы измерение было удалено. Измерения c и d избыточны во втором случае, описанном выше, даже если часть системы ненаблюдаема.
Избыточность может использоваться как источник информации для перекрестной проверки и корректировки измерений
Проверка данных обозначает все действия по проверке и проверке до и после этапа согласования.
Фильтрация данных обозначает процесс обработки измеренных данных таким образом, что значения становятся значимыми и лежат в диапазоне ожидаемых значений. Фильтрация данных необходима перед процессом согласования, чтобы повысить надежность этапа согласования. Есть несколько способов фильтрации данных, например, получение среднего нескольких измеренных значений за четко определенный период времени.
Проверка результата - это набор действий по проверке или проверке, предпринятых после процесса согласования, который учитывает измеренные и неизмеряемые переменные, а также согласованные значения. Подтверждение результатов охватывает, но не ограничивается, анализ штрафов для определения надежности согласования или связанные проверки, чтобы гарантировать, что согласованные значения лежат в определенном диапазоне, например температура должна быть в разумных пределах.
Проверка результатов может включать статистические тесты для проверки достоверности согласованных значений, путем проверки наличия грубых ошибок в наборе измеренных значений. Эти тесты могут быть, например,
Если в наборе измеренных значений нет грубых ошибок, то каждый штрафной член в целевой функции является случайной величиной, которая нормально распределена со средним значением, равным 0, и дисперсией, равной 1. Следовательно, целевая функция является случайной величиной, которая следует распределению хи-квадрат, поскольку это сумма квадратов нормально распределенных случайных величин. Сравнение значения целевой функции 


В индивидуальном тесте каждый штрафной член целевой функции сравнивается с критическими значениями нормального распределения. Если
Расширенная проверка и согласование данных (DVR) - это интегрированный подход, объединяющий методы согласования и проверки данных, который характеризуется
Простые модели включают только массовые балансы. При добавлении в модель термодинамических ограничений, таких как энергетический баланс, ее объем и уровень избыточности увеличиваются. В самом деле, как мы видели выше, уровень избыточности определяется как 

 Рабочий процесс расширенной проверки и согласования данных.
Рабочий процесс расширенной проверки и согласования данных. Грубые ошибки - это систематические ошибки измерения, которые могут искажать результаты согласования. Следовательно, важно выявить и устранить эти грубые ошибки в процессе сверки. После согласования могут быть применены статистические тесты, которые показывают, существует ли грубая ошибка где-то в наборе измерений. Эти методы исправления грубых ошибок основаны на двух концепциях:
Устранение грубых ошибок определяет одно измерение, на которое смещена систематическая ошибка, и исключает это измерение из набор данных. Определение отбрасываемого измерения основано на различных видах штрафных терминов, которые выражают, насколько измеренные значения отклоняются от согласованных значений. Как только обнаруживаются грубые ошибки, они исключаются из измерений, и согласование может быть выполнено без этих ошибочных измерений, которые портят процесс согласования. При необходимости исключение повторяют до тех пор, пока в наборе измерений не исчезнет грубая ошибка.
Снижение общей погрешности направлено на ослабление оценки неопределенности подозрительных измерений так, чтобы согласованное значение находилось в доверительном интервале 95%. Расслабление обычно находит применение, когда невозможно определить, какое измерение около одной единицы отвечает за грубую ошибку (эквивалентность грубых ошибок). Тогда погрешности измерений увеличиваются.
Важно отметить, что устранение грубых ошибок снижает качество согласования, либо уменьшается избыточность (устранение), либо увеличивается неопределенность измеренных данных (ослабление). Следовательно, его можно применять только тогда, когда начальный уровень избыточности достаточно высок, чтобы гарантировать, что согласование данных все еще может быть выполнено (см. Раздел 2,).
Расширенные решения DVR предлагают интеграцию упомянутых выше методов:
Результатом расширенной процедуры DVR является согласованный набор проверенных и согласованных данных процесса.
DVR находит применение в основном в отраслях промышленности, где измерения неточны или даже отсутствуют, например, в восходящем секторе, где поток метры сложно или дорого разместить (см.); или если точные данные имеют большое значение, например, по соображениям безопасности на атомных электростанциях (см.). Другой областью применения является мониторинг производительности и процессов (см.) В нефтепереработке или в химической промышленности.
Поскольку DVR позволяет надежно вычислять оценки даже для неизмеряемых переменных, Немецкое инженерное общество (VDI Gesellschaft Energie und Umwelt) приняло технологию DVR как средство замены дорогостоящих датчиков в атомной энергетике. (см. норму VDI 2048).
