
Войти
В физике и инженерии, постоянная времени, обычно обозначаемый греческой буквой τ (тау), является параметром, характеризующим реакцию на ступенчатый ввод первого порядка, линейный, неизменный во времени ( LTI) система. Постоянная времени является основной единицей характеристики LTI-системы первого порядка.
Во временной области обычный выбор для изучения временной характеристики - это переход от переходной характеристики к ступенчатому входу или импульсной характеристики на вход дельта-функции Дирака. В частотной области (например, глядя на преобразование Фурье переходной характеристики или используя вход, который является простой синусоидальной функцией времени) постоянная времени также определяет полосу пропускания инвариантной во времени системы первого порядка, то есть частота, на которой мощность выходного сигнала падает до половины значения, которое она имеет на низких частотах.
Постоянная времени также используется для характеристики частотной характеристики различных систем обработки сигналов - магнитных лент, радиопередатчиков и приемники, оборудование для записи и воспроизведения, и цифровые фильтры, которые могут быть смоделированы или аппроксимированы системами LTI первого порядка. Другие примеры включают постоянную времени, используемую в системах управления для регуляторов интегрального и производного действия, которые часто пневматические, а не электрические.
Постоянные времени - это особенность анализа сосредоточенных систем (метод анализа сосредоточенной емкости) для тепловых систем, который используется, когда объекты равномерно охлаждают или нагреваются под влиянием конвективного охлаждения или нагревания.
Физически постоянная времени представляет собой время, необходимое для того, чтобы отклик системы упал до нуля, если бы система продолжала распадаться с начальной скоростью, из-за постепенного изменения скорости распада отклик фактически уменьшился. по значению до 

LTI-системы первого порядка характеризуются дифференциальным уравнением

где τ представляет собой константу экспоненциального затухания, а V является функцией времени t

В правой части находится функция принуждения f (t), описывающая внешнюю движущую функцию времени, которую можно рассматривать как вход системы, для которой V (t) это ответ или вывод системы. Классическими примерами для f (t) являются:
ступенчатая функция Хевисайда, часто обозначаемая u (t):

the импульсная функция, часто обозначаемая δ (t), а также синусоидальная входная функция:

или

где A - амплитуда вынуждающей функции, f - частота в герцах, а ω = 2π f - частота в радианах в секунду.
Пример решения дифференциального уравнения с начальным значением V 0 и без функции принуждения:

где

- начальное значение V. Таким образом, ответ представляет собой экспоненциальный спад с постоянной времени τ.
Предположим,
 .
.Такое поведение называется «убывающей» экспоненциальной функцией. Время 
Здесь:
 в системе управления)
в системе управления) ; тогда
; тогда  , и поэтому
, и поэтому 
 ; тогда
; тогда 
 , и поэтому
, и поэтому 
 ; тогда
; тогда 
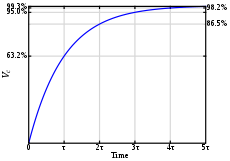
После периода, равного одной постоянной времени, функция n достигает e = примерно 37% от своего начального значения. В случае 4 после пяти постоянных времени функция достигает значения менее 1% от исходного. В большинстве случаев этот порог в 1% считается достаточным, чтобы предположить, что функция упала до нуля - как показывает опыт, в технике управления стабильная система - это система, которая демонстрирует такое общее затухающее поведение.
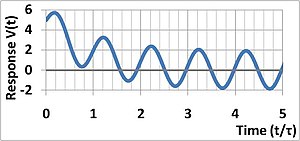 Пример реакции системы на функцию форсирования синусоидальной волны. Ось времени в единицах постоянной времени . Отклик затухает, превращаясь в простую синусоидальную волну.
Пример реакции системы на функцию форсирования синусоидальной волны. Ось времени в единицах постоянной времени . Отклик затухает, превращаясь в простую синусоидальную волну.  Амплитудно-частотная характеристика системы в зависимости от частоты в единицах ширины полосы f 3 дБ. Отклик нормализуется к нулевому значению частоты, равному единице, и падает до 1 / √2 в полосе пропускания.
Амплитудно-частотная характеристика системы в зависимости от частоты в единицах ширины полосы f 3 дБ. Отклик нормализуется к нулевому значению частоты, равному единице, и падает до 1 / √2 в полосе пропускания. Предположим, что функция форсирования выбрана синусоидальной так:

(Ответ на ввод действительной косинусной или синусоидальной волны можно получить, взяв действительную или мнимая часть окончательного результата в силу формулы Эйлера.) Общее решение этого уравнения для времен t ≥ 0 с, предполагая V (t = 0) = V 0 :


В течение долгого времени убывающие экспоненты становятся незначительными и стационарное решение или долгосрочное решение:

Величина этого ответа это:

По соглашению, полоса пропускания этой системы - это частота, где | V ∞ | падает до половинного значения, или где ωτ = 1. Это обычное соглашение о полосе пропускания, определяемое как частотный диапазон, в котором мощность падает менее чем наполовину (не более -3 дБ). Использование частоты в герцах, а не в радианах / с (ω = 2πf):

Обозначение f 3dB происходит от выражения мощности в децибелах и наблюдение, что половинная мощность соответствует падению значения | V ∞ | на коэффициент 1 / √2 или на 3 децибела.
Таким образом, постоянная времени определяет полосу пропускания этой системы.
 Переходная характеристика системы для двух различных начальных значений V 0, одно выше конечного значения, а другое - нулевое. Длительный отклик - это постоянная величина V ∞. Ось времени в единицах постоянной времени .
Переходная характеристика системы для двух различных начальных значений V 0, одно выше конечного значения, а другое - нулевое. Длительный отклик - это постоянная величина V ∞. Ось времени в единицах постоянной времени .Предположим, что функция принуждения выбрана в качестве пошагового входа, поэтому:

с u (t) шагом Хевисайда функция. Общее решение этого уравнения для времен t ≥ 0 с при условии, что V (t = 0) = V 0 :

(Может Следует отметить, что этот отклик является пределом ω → 0 указанного выше отклика на синусоидальный вход.)
Решение для длительного времени не зависит от времени и от начальных условий:

Постоянная времени остается неизменной для той же системы независимо от начальных условий. Проще говоря, система приближается к своей конечной устойчивой ситуации с постоянной скоростью, независимо от того, насколько она близка к этому значению в любой произвольной начальной точке.
Например, рассмотрим электродвигатель, запуск которого хорошо моделируется системой LTI первого порядка. Предположим, что при запуске из состояния покоя двигателю требуется секунды, чтобы достичь 63% его номинальной скорости 100 об / мин, или 63 об / мин, то есть меньше 37 об / мин. Затем будет обнаружено, что после следующих секунды двигатель ускорился еще на 23 об / мин, что составляет 63% от этой разницы в 37 об / мин. Это доводит его до 86 об / мин, что все еще составляет 14 об / мин. Через треть ⅛ секунды двигатель наберет дополнительные 9 оборотов в минуту (63% от этой разницы в 14 оборотов в минуту), установив его на 95 оборотов в минуту.
Фактически, при любой начальной скорости с ≤ 100 об / мин, через ⅛ секунды этот конкретный двигатель получит дополнительные 0,63 × (100 - с ) Об / мин.
 Отклик на скачок напряжения конденсатора.
Отклик на скачок напряжения конденсатора.  Отклик на скачок напряжения на индукторе.
Отклик на скачок напряжения на индукторе. В цепи RL составлен для одного резистора и катушки индуктивности постоянная времени

, где R - сопротивление (в Ом ), а L - индуктивность (в Henrys ).
Аналогично, в RC-цепи, состоящей из одного резистора и конденсатора, постоянная времени

где R - сопротивление (в Ом ), а C - емкость (в фарадах ).
Электрические цепи часто более сложны, чем эти примеры, и могут иметь несколько постоянных времени (см. Переходная характеристика и Разделение полюсов для некоторых примеров.) В случае, когда обратная связь присутствует, система может показывать нестабильные, увеличивающиеся колебания. Вдобавок физические электрические цепи редко являются действительно линейными системами, за исключением возбуждений с очень низкой амплитудой; однако широко используется приближение линейности.
В цифровых электронных схемах часто используется другая мера, FO4. Это можно преобразовать в единицы постоянной времени с помощью уравнения 
Постоянные времени - это характеристика анализа сосредоточенных систем (метод анализа сосредоточенной емкости) для тепловых систем, используемых, когда объекты равномерно охлаждаются или нагреваются под влиянием конвективного охлаждения или нагревания. В этом случае передача тепла от тела к окружающей среде в данный момент времени пропорциональна разнице температур между телом и окружающей средой:

, где h - коэффициент теплопередачи, а A s - площадь поверхности, T (t) = температура тела в момент времени t, а T a - постоянная температура окружающей среды. Положительный знак указывает на то, что F является положительным, когда тепло выходит из тела, потому что его температура выше, чем температура окружающей среды (F - поток наружу). Если тепло теряется в окружающую среду, эта теплопередача приводит к падению температуры тела, определяемой по формуле:

где ρ = плотность, c p= удельная теплоемкость, а V - объем тела. Отрицательный знак указывает на падение температуры при передаче тепла наружу от тела (то есть, когда F>0). Приравнивая эти два выражения для теплопередачи,

Очевидно, это система LTI первого порядка, которая может быть представлена в виде:

с

Другими словами, постоянная времени говорит, что большие массы ρV и большая теплоемкость c p приводят к более медленным изменениям температуры, в то время как большие площади поверхности A s и лучшая теплопередача h приводят к более быстрым изменениям температуры.
Сравнение с вводным дифференциальным уравнением предлагает возможное обобщение для изменяющихся во времени температур окружающей среды T a. Однако, сохраняя простой пример окружающего константы, подставляя переменную ΔT ≡ (T - T a), получаем:

Системы, для которых охлаждение удовлетворяет вышеуказанному экспоненциальному уравнению, говорят, что удовлетворяют Закон охлаждения Ньютона. Решение этого уравнения предполагает, что в таких системах разница между температурой системы и ее окружения ΔT как функция времени t определяется как:

, где ΔT 0 - начальная разница температур в момент времени t = 0. На словах, тело принимает ту же температуру, что и окружающая среда, с экспоненциально медленной скоростью, определяемой постоянной времени.
В возбудимой клетке, такой как мышца или нейрон, постоянная времени мембранного потенциала

, где r m - это сопротивление через мембрану, а c m - емкость мембраны.
Сопротивление через мембрану является функцией количества открытых ионных каналов, а емкость - функцией свойств липидного бислоя.
Постоянная времени равна используется для описания роста и падения мембранного напряжения, где рост описывается как

и падение описывается как

где напряжение в милливольтах, время в секундах, а
Vmax определяется как максимальное изменение напряжения от потенциала покоя, где

, где r m - сопротивление через мембрану, а I - ток через мембрану.
Настройка для t =
Установка для t =
Чем больше время константа, тем медленнее растет или падает потенциал нейрона. Длительная постоянная времени может привести к временному суммированию или алгебраическому суммированию повторяющихся потенциалов. Короткая постоянная времени дает скорее детектор совпадений через пространственное суммирование.
В экспоненциальном распаде, например, радиоактивного изотоп, постоянная времени может интерпретироваться как среднее время жизни. период полураспада THLсвязан с экспоненциальной постоянной времени

Величина, обратная постоянной времени, называется постоянной распада и обозначается
A постоянная времени - это количество времени, которое требуется метеорологическому датчику, чтобы отреагировать на быстрое изменение измеряемой величины, пока он не начнет измерять значения. в пределах допуска точности, обычно ожидаемого от датчика.
Это чаще всего применяется к измерениям температуры, температуры точки росы, влажности и давления воздуха. Радиозонды особенно страдают из-за их быстрого увеличения высоты.
| На Викискладе есть материалы, связанные с Постоянная времени. |
