В механике сплошных сред теория бесконечно малых деформаций представляет собой математический подход к описание деформации твердого тела, в котором причинен ущерб материальных частиц, которые меньше других (действительно, бесконечно меньше), чем любой соответствующий размер тела; так что его геометрия и основные свойства материала (такие как плотность и жесткость ) в каждой точке пространства могут считаться в результате деформации.
При таком предположении уравнения механики сплошной среды значительно упрощаются. Этот подход также можно назвать теорией малых деформаций, теорией малых смещений или теорией малых смещений-градиентов . Это контрастирует с теорией конечных деформаций, где сделано противоположное предположение.
Теория применяемых в гражданском строительстве и машиностроении методов применения в гражданском строительстве и машиностроении для анализа напряжений конструкций, построенных из относительно жестких упругих материалов, таких как бетон и сталь, поскольку общей целью при проектировании таких конструкций является минимизация их деформации при типичных нагрузках. Это приближение требует осторожности в случае тонких гибких тел, таких как стержни, пластины и оболочки, которые подвержены значительному вращению, что делает результаты ненадежными.
Содержание
- 1 Тензор бесконечно малых деформаций
- 1.1 Геометрическое происхождение
- 1.2 Физическая интерпретация
- 1.3 Правила трансформации деформации
- 1,4 Инварианты деформации
- 1,5 Основные деформации
- 1,6 Объемная деформация
- 1,7 Тензор девиатора деформации
- 1,8 Октаэдрическая деформация
- 1,9 Эквивалентная деформация
- 2 Уравнения совместимости
- 3 Особые случаи
- 3.1 Плоская деформация
- 3.2 Антиплоскостная деформация
- 4 Тензор бесконечно малых вращений
- 4.1 Осевой вектор
- 4.2 Связь между тензором деформации и вектора вращения
- 4.3 Связь между тензором и вектором вращения
- 5 Тензор деформации в цилиндрических координатах
- 6 Тензор деформации в сферических координатах
- 7 См. также
- 8 Ссылки
- 9 Внешние ссылки
Тензор бесконечно малой деформации
Для бесконечно малой деформации состояния континуального тела , в котором градиент с ущербом ( тензор 2-го порядка) мал по сравнению с единицей, т.е.  , можно выполнить геометрическую линеаризацию любого из (бесконечных множеств) тензоров деформации, используемых в конечных деформациях, например тензор деформации Лагранжа
, можно выполнить геометрическую линеаризацию любого из (бесконечных множеств) тензоров деформации, используемых в конечных деформациях, например тензор деформации Лагранжа  и тензор деформации Эйлера
и тензор деформации Эйлера  . При такой линеаризации не крутятся нелинейные члены второго порядка тензора конечных деформаций. Таким образом, мы имеем
. При такой линеаризации не крутятся нелинейные члены второго порядка тензора конечных деформаций. Таким образом, мы имеем

или

и

или

Эта линеаризация подразумевает, что лагранжевое описание и эйлерово описание представляет собой, поскольку существует небольшая разница в материальных и пространственных координатах данной материальной точки в континууме. Следовательно, компоненты градиента с поверхности материала и градиента пространственного смещения равны. Таким образом, мы имеем

или 
где  - компоненты бесконечно малого тензор деформации
- компоненты бесконечно малого тензор деформации  , также называемый тензором деформации Коши, тензором линейной деформации или тензором малых деформаций.
, также называемый тензором деформации Коши, тензором линейной деформации или тензором малых деформаций.
![{\ begin {align} \ varepsilon _ {{ij}} = { \ frac {1} {2}} \ left (u _ {{i, j}} + u _ {{j, i}} \ right) \\ = \ left [{\ begin {matrix} \ varepsilon _ {{ 11}} \ varepsilon _ {{12}} \ varepsilon _ {{13}} \\\ varepsilon _ {{21}} \ varepsilon _ {{22}} \ varepsilon _ {{23}} \ \\ varepsilon _ {{31}} \ varepsilon _ {{32}} \ varepsilon _ {{33}} \\\ end {matrix}} \ right] \\ = \ left [{\ begin {matrix } {\ frac {\ partial u_ {1}} {\ partial x_ {1}}} {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {1}} {\ partial x_ {2}}} + {\ frac {\ partial u_ {2}} {\ partial x_ {1}}} \ right) {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {1}} {\ partial x_ {3}}} + {\ frac {\ partial u_ {3}} {\ partial x_ {1}}} \ right) \\ {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {2}} {\ partial x_ {1}}} + {\ frac {\ partial u_ {1}} {\ partial x_ {2}}} \ right) {\ fr ac {\ partial u_ {2}} {\ partial x_ {2}}} {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {2}} {\ partial x_ {3} }} + {\ frac {\ partial u_ {3}} {\ partial x_ {2}}} \ right) \\ {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {3 }} {\ partial x_ {1}}} + {\ frac {\ partial u_ {1}} {\ partial x_ {3}}} \ right) {\ frac {1} {2}} \ left ({ \ frac {\ partial u_ {3}} {\ partial x_ {2}}} + {\ frac {\ partial u_ {2}} {\ partial x_ {3}}} \ right) {\ frac {\ partial u_ {3}} {\ partial x_ {3}}} \\\ конец {матрица}} \ right] \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bb0dec1ef6797c51a0f0c4181deccd53618a3fe0)
или используя другие обозначения:
![{\ displaysty ле \ left [{\ begin {matrix} \ varepsilon _ {xx} \ varepsilon _ {xy} \ varepsilon _ {xz} \\\ varepsilon _ {yx} \ varepsilon _ {yy} \ varepsilon _ {yz} \ \\ varepsilon _ {zx} \ varepsilon _ {zy} \ varepsilon _ {zz} \\\ end {matrix}} \ right] = \ left [{\ begin {matrix} {\ frac {\ частичный u_ { x}} {\ partial x}} {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {x}} {\ partial y}} + {\ frac {\ partial u_ {y }} {\ partial x}} \ right) {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {x}} {\ partial z}} + {\ frac {\ partial u_ {z}} {\ partial x}} \ right) \\ {\ frac {1} {2}} \ left ({\ frac {\ partial u_ { y}} {\ partial x}} + {\ frac {\ partial u_ {x}} {\ partial y}} \ right) {\ frac {\ partial u_ {y}} {\ partial y}} { \ frac {1} {2}} \ left ({\ frac {\ partial u_ {y}} {\ partial z}} + {\ frac {\ partial u_ {z}} {\ partial y}} \ right) \\ {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {z}} {\ partial x}} + {\ frac {\ partial u_ {x}} {\ partial z}} \ right) {\ frac {1} {2}} \ left ({\ frac {\ partial u_ {z}} {\ partial y}} + {\ frac {\ partial u_ {y}} {\ partial z }} \ right) {\ frac {\ частичное u_ {z}} {\ partial z}} \\\ end {matrix}} \ right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/39dcad2454a2afad8148dbad6cdd8cd60014ca2d)
Кроме того, поскольку градиент деформации может быть выражен как  где
где  - тождественный тензор второго порядка, у нас есть
- тождественный тензор второго порядка, у нас есть

Также из в общем выражении для лагранжевых и эйлеровых тензоров конечных деформаций, мы имеем
![{\ begin {align} {\ mathbf E} _ {{(m)}} = {\ frac {1} {2m}} ( {\ mathbf U} ^ {{2m}} - {\ boldsymbol {I}}) = {\ frac {1} {2m}} [({\ boldsymbol {F}} ^ {T} {\ boldsymbol {F} }) ^ {m} - {\ boldsymbol {I}}] \ приблизительно {\ frac {1} {2m}} [\ {{\ boldsymbol {\ nabla}} {\ mathbf {u}} + ({\ boldsymbol {\ nabla}} {\ mathbf {u}}) ^ {T} + {\ boldsymbol {I}} \} ^ {m} - {\ boldsymbol {I}}] \ приблизительно {\ boldsymbol {\ varepsilon}} \\ {\ mathbf e} _ {{(m)}} = {\ frac {1} {2m}} ({\ mathbf V} ^ {2m}} - {\ boldsymbol {I}}) = { \ frac {1} {2m}} [({\ boldsymbol {F}} {\ boldsymbol {F}} ^ {T}) ^ {m} - {\ boldsymbol {I}}] \ приблизительно {\ boldsymbol {\ varepsilon}} \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3f23afe38e5f63d74050dbaf5d362b65b4da1ca0)
Геометрический вывод

Рисунок 1. Два -мерная геометрическая деформация бесконечно малого материального элемента.
Рассмотрим двумерную деформацию бесконечно малого материального элемента с размерами  by
by  (рис. 1), который после деформации принимает форму ромба. Из геометрии рисунка 1 имеем
(рис. 1), который после деформации принимает форму ромба. Из геометрии рисунка 1 имеем

Для очень малых градиентов с ущерба, т. е. , мы имеем

нормальная деформация в  -направление прямоугольного элемента определяется как
-направление прямоугольного элемента определяется как

и зная, что  , мы имеем
, мы имеем

Аналогично, нормальная деформация в  -направление и
-направление и  -направление, становится
-направление, становится

инженерная деформация сд вига или изменение угла между двумя исходно ортогональными линиями материала, в данном случае линия  и
и  , определяется как
, определяется как

Из геометрии рисунка 1 имеет

Для небольших поворотов, то есть  и
и 
 мы имеем
мы имеем

и, опять же, для малых градиентов с ущерба, мы имеем

, таким образом,

Поменяв местами и и  и
и  , можно показать, что
, можно показать, что 
Аналогично, для -и -плоскости, у нас есть

Видно, компоненты тензорной деформации сдвига тензора бесконечно малых деформаций могут быть выражены с помощью определения деформации,  , как
, как
![{\ displaystyle \ left [{\ begin {matrix} \ varepsilon _ {xx} \ varepsilon _ {xy} \ varepsilon _ {xz} \\ \ varepsilon _ {yx} \ varepsilon _ {yy} \ varepsilon _ {yz} \\\ varepsilon _ {zx} \ varepsilon _ {zy} \ varepsilon _ {zz} \\\ end {matrix}} \ right] = \ left [{\ begin {matrix} \ varep силон _ {xx} \ gamma _ {xy} / 2 \ gamma _ {xz} / 2 \\\ gamma _ {yx } / 2 \ varepsilon _ {yy} \ gamma _ {yz} / 2 \\\ гамма _ {zx} / 2 \ gamma _ {zy} / 2 \ varepsilon _ {zz} \\\ end { матрица}} \ right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5cd420e9f68d44f0849d0453048377abd2d7f20e)
Физическая интерпретация
Из теории конечных деформаций мы имеем

Для бесконечно малых деформаций мы

Деление на  мы имеем
мы имеем

Для небольших деформаций мы предполагаем, что  , таким образом, второй член левой части становится:
, таким образом, второй член левой части становится:  .
.
Тогда мы имеем

где  , является единичным вектором в направлении
, является единичным вектором в направлении  , а выражение в левой части - это нормальная деформация
, а выражение в левой части - это нормальная деформация  в направлении
в направлении  . Для частного случая в направлении
. Для частного случая в направлении  , т. Е.
, т. Е.  , мы имеем
, мы имеем

Аналогично для  и
и  мы можем найти нормальные деформации
мы можем найти нормальные деформации  и
и  соответственно. Следовательно, диагональные элементы тензора бесконечно малых деформаций являются нормальными деформациями в координатных направлениях.
соответственно. Следовательно, диагональные элементы тензора бесконечно малых деформаций являются нормальными деформациями в координатных направлениях.
Правила преобразования деформации
Если мы выберем ортонормированную систему координат ( ) мы можем записать тензор в терминах компонентов по отношению к этому базовым инструментам как
) мы можем записать тензор в терминах компонентов по отношению к этому базовым инструментам как

В матричной форме

Мы можем легко выбрать другую ортонормированную систему ко ординат (  ) вместо этого. В этом случае компоненты тензора разные, скажем
) вместо этого. В этом случае компоненты тензора разные, скажем

Компоненты деформации в двух системах с использованием ресурсов

где использо валось соглашение о суммировании Эйнштейна для повторяющихся индексов и  . В матричной форме
. В матричной форме

или

Инварианты деформации
Некоторые операции с тензором деформации дают тот же результат без относительно того, какая ортонормированная система координат используется для представления компонентов деформации. Результаты этих операций называются инвариантами деформации . Наиболее часто используемые инварианты деформации:
![{\ displaystyle {\ begin {align} I_ {1} = \ mathrm {tr} ({ \ boldsymbol {\ varepsilon}}) \\ I_ {2} = {\ tfrac {1} {2}} \ {[\ mathrm {tr} ({\ boldsymbol {\ varepsilon}})] ^ {2} - \ mathrm {tr} ({\ boldsymbol {\ varepsilon}} ^ {2}) \} \\ I_ {3} = \ det ({\ boldsymbol {\ varepsilon}}) \ end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdc12c6f3d7e5049f74857861c3178c3f6728d99)
В терминах компонентов

Основные деформации
Можно показать, что можно найти систему координат ( ), в компонентах тензора деформации
), в компонентах тензора деформации

Компоненты тензора деформации в () системы координат называются главными деформациями и направлениями  называются направлениями основной деформации. В этой системе координат нет компонентов деформации, главные деформации представляют собой максимальное и минимальное растяжение элемента преобразования.
называются направлениями основной деформации. В этой системе координат нет компонентов деформации, главные деформации представляют собой максимальное и минимальное растяжение элемента преобразования.
Если нам заданы компоненты тензора деформаций в произвольной ортонормированной системе координат, мы можем найти главные деформации, используя разложение по собственным значениям, определенное путем решения системы уравнений

Эта система эквивалентна сопоставлению вектора , вдоль которого тензор деформации становится чистым растяжением без компонента сдвига.
Объемная деформация
Расширение (относительное изменение объема) - это след тензора:

Фактически, если мы рассматриваем куб с длиной ребра a, это квазикуб после деформации (изменение углов не меняет объем) с размерами  и V 0 = a, поэтому
и V 0 = a, поэтому

с учетом малых деформаций

следовательно, формула.
 . Реальное изменение объема (вверху) и приблизительное (внизу): зеленый рисунок показывает расчетный объем, оранжевый рисунок - неучтенный объем
. Реальное изменение объема (вверху) и приблизительное (внизу): зеленый рисунок показывает расчетный объем, оранжевый рисунок - неучтенный объем
В случае чистого сдвига мы можем видеть, что нет изменения громкость.
Тензор девиатора деформации
Тензор бесконечно малых деформаций , аналогично тензору напряжений Коши, может быть выражен сумма как двух других тензоров:
- a тензор средней деформации или тензор объемной деформации или тензор сферической деформации,
 , относящийся к расширению или изменению объема; и
, относящийся к расширению или изменению объема; и - девиаторный компонент, называемый тензором девиатора деформации,
 , относящийся к искажению.
, относящийся к искажению.

где  - средняя деформация, определяемая по формуле
- средняя деформация, определяемая по формуле

Девиаторный тензор деформации может быть получен путем вычитания тензора средней деформации из тензора бесконечно малых деформаций:
![{\displaystyle {\begin{aligned}\ \varepsilon '_{ij}=\varepsilon _{ij}-{\frac {\varepsilon _{kk}}{3}}\delta _{ij}\\\left[{\begin{matrix}\varepsilon '_{11}\varepsilon '_{12}\varepsilon '_{13}\\\varepsilon '_{21}\varepsilon '_{22}\varepsilon '_{23}\\\varepsilon '_{31}\varepsilon '_{32}\varepsilon '_{33}\\\end{matrix}}\right]=\left[{\begin{matrix}\varepsilon _{11}\varepsilon _{12}\varepsilon _{13}\\\varepsilon _{21}\varepsilon _{22}\varepsilon _{23}\\\varepsilon _{31}\varepsilon _{32}\varepsilon _{33}\\\end{matrix}}\right]-\left[{\begin{matrix}\varepsilon _{M}00\\0\varepsilon _{M}0\\00\varepsilon _{M}\\\end{matrix}}\right]\\=\left[{\begin{matrix}\varepsilon _{11}-\varepsilon _{M}\varepsilon _{12}\varepsilon _{13}\\\varepsilon _{21}\varepsilon _{22}-\varepsilon _{M}\varepsilon _{23}\\\varepsilon _{31}\varepsilon _{32}\varepsilon _{33}-\varepsilon _{M}\\\end{matrix}}\right]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a45a5c7b7b098ea36d3e9abd244afe070e3cb5d)
Октаэдрический ие деформации
Пусть () - направления трех основных деформаций. Октаэдрическая плоскость - это плоскость, нормаль которой образует равные углы с тремя главными направлениями. Техническая деформация сдвига на октаэдрической плоскости называется октаэдрической деформацией сдвига и определяется как

где  являются основными деформациями.
являются основными деформациями.
Нормальная деформация на октаэдрической плоскости определяется как

Эквивалентная деформация
Скалярная величина, называемая эквивалентной деформацией или эквивалентной деформацией по Мизесу, часто используется для описания состояния деформации в твердых телах. В литературе можно найти несколько определений эквивалентной деформации. Определение, которое обычно используется в литературе по пластичности :

Эта величина является работой, сопряженной с эквивалентным напряжением, определенным как

Уравнения совместимости
Для заданных компонентов деформации уравнение тензора деформации  представляет собой систему шести дифференциальных уравнений для определения три компонента смещения
представляет собой систему шести дифференциальных уравнений для определения три компонента смещения  , что дает переопределенную систему. Таким образом, решение для произвольного выбора компонентов деформации обычно не существует. Поэтому на компоненты деформации накладываются некоторые ограничения, называемые уравнениями совместимости. С добавлением трех уравнений совместимости количество независимых уравнений сокращается до трех, что соответствует количеству неизвестных компонентов смещения. Эти ограничения на тензор деформации были обнаружены Сен-Венаном и названы «уравнениями совместимости Сен-Венана ».
, что дает переопределенную систему. Таким образом, решение для произвольного выбора компонентов деформации обычно не существует. Поэтому на компоненты деформации накладываются некоторые ограничения, называемые уравнениями совместимости. С добавлением трех уравнений совместимости количество независимых уравнений сокращается до трех, что соответствует количеству неизвестных компонентов смещения. Эти ограничения на тензор деформации были обнаружены Сен-Венаном и названы «уравнениями совместимости Сен-Венана ».
Функции совместимости служат для обеспечения однозначной функции непрерывного смещения . Если упругая среда визуализируется как набор бесконечно малых кубиков в недеформированном состоянии, после того, как среда деформирована, произвольный тензор деформации может не привести к ситуации, в которой искаженные кубы все еще подходят друг к другу без перекрытия.
В индексных обозначениях уравнения совместимости выражаются как

| Инженерное обозначение |
|---|
 




|
Особые случаи
Плоская деформация
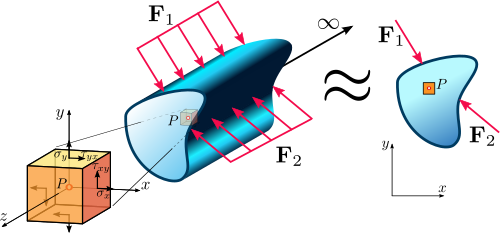
Плоское деформированное состояние в континууме.
В реальных инженерных компонентах напряжение (и деформация) равны 3- D тензоры, но в призматических структурах, таких как длинная металлическая заготовка, длина структуры намного больше, чем два других измерения. Деформации, связанные с длиной, т.е. нормальная деформация и деформации сдвига  и
и  (если длина - 3 направления) ограничены близкими инструментами и малы по сравнению с поперечными деформациями. В таком случае плоская деформация является приемлемым приближением. тензор деформации для плоской деформации записывается как:
(если длина - 3 направления) ограничены близкими инструментами и малы по сравнению с поперечными деформациями. В таком случае плоская деформация является приемлемым приближением. тензор деформации для плоской деформации записывается как:

, в котором двойное подчеркивание обозначает тензор второго порядка. Это деформированное состояние называется плоской деформацией. Соответствующий тензор напряжений:

, в котором ненулевое значение  необходимо для поддержания ограничения
необходимо для поддержания ограничения  . Этот термин напряжения может быть временно удален из анальной проблемы.
. Этот термин напряжения может быть временно удален из анальной проблемы.
Антиплоскостная деформация
Антиплоскостная деформация - это другое особое состояние деформации, которое может возникнуть в теле, например, в области, близкой к винтовой дислокации. тензор деформации для деформации антиплоскости определяется как

Тензор бесконечно малых вращений
Тензор бесконечно малых деформаций определяется как
![{\ boldsymbol {\ varepsilon}} = {\ frac {1} {2}} [{\ boldsymbol {\ nabla}} {\ mathbf {u}} + ({\ boldsymbol { \ nabla}} {\ mathbf {u}}) ^ {T}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/a120dd47853fdf623ed080096e75e2069e84c220)
Таким образом градиент с территории может быть выражен как

где
![{\ boldsymbol {\ omega}}: = {\ frac {1} {2}} [{\ boldsymbol {\ nabla}} {\ mathbf {u}} - ({\ boldsymbol {\ nabla }} {\ mathbf {u}}) ^ {T}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/dcf990ac8f37393cf1f0835349a51872f9476ce7)
Количество  - это тензор бесконечно малого вращения . Этот тензор кососимметричен. Для бесконечно малых деформаций скалярные компоненты удовлетворяют условию
- это тензор бесконечно малого вращения . Этот тензор кососимметричен. Для бесконечно малых деформаций скалярные компоненты удовлетворяют условию  . Обратите внимание, что градиент с повреждением мал только в том случае, если и тензор деформации и тензор вращения бесконечно малы.
. Обратите внимание, что градиент с повреждением мал только в том случае, если и тензор деформации и тензор вращения бесконечно малы.
Осевой вектор
Кососимметричный тензор второго порядка имеет три независимых скалярных компонента. Эти три компонента используются для определения аксиального вектора,  , как показано ниже:
, как показано ниже:

где  - символ перестановки . В матричной форме
- символ перестановки . В матричной форме

Осевой вектор также называется бесконечно малым вектором вращения . Вектор вращения связан с градиентом с нарушением воздействия

В индексной записи

Если  и
и  , то твердое тело вращается на
, то твердое тело вращается на  вокруг вектора .
вокруг вектора .
Связь между тензором деформации и вектором вращения
Дано непрерывное однозначное поле с ущербом  и соответствующие тензор бесконечно малых деформаций , имеем (см Тензорная производная (механика сплошной среды) )
и соответствующие тензор бесконечно малых деформаций , имеем (см Тензорная производная (механика сплошной среды) )
![{\ boldsymbol {\ nabla}} \ times {\ boldsymbol {\ varepsilon}} = e _ {{ijk}} ~ \ varepsilon _ {{lj, i}} ~ {\ mathbf {e}} _ {k} \ otimes {\ mathbf {e}} _ {l} = {\ tfrac {1} {2}} ~ e _ {{ijk}} ~ [u _ {{l, ji}} + u _ {{j, li}}] ~ {\ mathbf {e}} _ {k} \ otimes {\ mathbf {e}} _ {l}](https://wikimedia.org/api/rest_v1/media/math/render/svg/13fbd0b77f6478a70d04b0f31759e5076ca30028)
Временное изменение порядка дифференцирования не меняет результат,  . Следовательно,
. Следовательно,

Также

Следовательно,

Связь между тензором и вектором вращения
Из важного тождества, касающегося curl тензора, мы знаем, что для непрерывного одиночного -значного поля с ,

Времен мы имеем 
Тензор деформации в цилиндрических координатах
В цилиндрических полярных координат ( ) вектор с ущерба можно записать как
) вектор с ущерба можно записать как

Компоненты тензора деформации в цилиндрической системе координат задается по формуле: 
Тензор деформации в сферических координаты
В сферических координатах ( ), вектор с ущерба можно записать как
), вектор с ущерба можно записать как

Сферические координаты (r, θ, φ), обычно используемые в физике: радиал ьное расстояние r, полярный угол θ (
theta ) и азимутальный угол φ (
phi ). Символ ρ (
rho ) часто используется вместо r.

Компоненты тензор деформации в сферической системе координат задается выражением

См. также
Ссылки
Внешние ссылки

 Рисунок 1. Два -мерная геометрическая деформация бесконечно малого материального элемента.
Рисунок 1. Два -мерная геометрическая деформация бесконечно малого материального элемента.  . Реальное изменение объема (вверху) и приблизительное (внизу): зеленый рисунок показывает расчетный объем, оранжевый рисунок - неучтенный объем
. Реальное изменение объема (вверху) и приблизительное (внизу): зеленый рисунок показывает расчетный объем, оранжевый рисунок - неучтенный объем Плоское деформированное состояние в континууме.
Плоское деформированное состояние в континууме.  Сферические координаты (r, θ, φ), обычно используемые в физике: радиал ьное расстояние r, полярный угол θ (theta ) и азимутальный угол φ (phi ). Символ ρ (rho ) часто используется вместо r.
Сферические координаты (r, θ, φ), обычно используемые в физике: радиал ьное расстояние r, полярный угол θ (theta ) и азимутальный угол φ (phi ). Символ ρ (rho ) часто используется вместо r.