
Войти
 Чертеж DCV1 на основе изображений с Deepsea Challenger веб-сайт (без масштабирования) Чертеж DCV1 на основе изображений с Deepsea Challenger веб-сайт (без масштабирования) | |
| История | |
|---|---|
| Имя: | Deepsea Challenger |
| Строитель: | Acheron Project Pty Ltd |
| Запущен: | 26 января 2012 г. |
| В эксплуатации: | 2012 |
| Статус: | Действует с 2018 г. |
| Общие характеристики | |
| Тип: | Глубокое погружение транспортное средство |
| Водоизмещение: | 11,8 тонны |
| Длина: | 7,3 м (24 фута) |
| Установленная мощность: | электродвигатель |
| Движущая сила: | 12 подруливающих устройств |
| Скорость: | 3 узла (5,6 км / ч; 3,5 мили в час) |
| Выносливость: | 56 часов |
| Глубина испытания: | 11000 м (36000 футов) |
| Дополнение: | 1 |
Deepsea Challenger (DCV 1) - это погружной глубоководный аппарат длиной 7,3 метра (24 фута), предназначенный для дно Бездны Челленджера, самой глубокой известной точки на Земле. 26 марта 2012 года канадский кинорежиссер Джеймс Кэмерон пилотировал корабль для достижения этой цели во втором пилотируемом погружении в Глубину Челленджера. Построенный в Сиднее, Австралия исследовательской и проектной компанией Acheron Project Pty Ltd, Deepsea Challenger включает в себя научное оборудование для отбора проб и 3-D камеры высокого разрешения ; он достиг самой глубокой точки океана после двух часов и 36 минут спуска с поверхности.
Deepsea Challenger был тайно построен в Австралии в партнерстве с Национальным географическим обществом и при поддержке Rolex в программе Deepsea Challenge. Строительством подводной лодки руководил австралийский инженер Рон Аллум. Многие из членов команды разработчиков подводных аппаратов родом из сиднейского братства пещерных дайверов, включая самого Аллума с многолетним опытом погружений в пещеры.
Работа в небольшой инженерной мастерской в Лейхардте, Сидней, Аллум. создали новые материалы, включая специализированный структурный синтаксический пенопласт под названием Isofloat, способный выдерживать огромные сжимающие силы на глубине 11 километров (6,8 миль). Новая пена уникальна тем, что она более однородна и обладает большей однородной прочностью, чем другие коммерчески доступные синтаксические пены, но при удельной плотности около 0,7 она будет плавать в воде. Пена состоит из очень маленьких полых стеклянных сфер, подвешенных в эпоксидной смоле, и составляет около 70% объема подводной лодки.
Прочность пены позволила конструкторам Deepsea Challenger включить двигатели подруливающих устройств как часть инфраструктуры, установленной внутри пена, но без использования стального каркаса для крепления различных механизмов. Пена заменяет заполненные бензином резервуары для флотации, которые использовались в историческом батискафе Триест.
. Allum также разработал множество инноваций, необходимых для преодоления ограничений существующих продуктов (и в настоящее время разрабатываются для других глубинных морская техника). К ним относятся маслозаполненные двигатели с балансировкой давления; Светодиодные осветительные решетки; новые типы фотоаппаратов; а также быстрые и надежные кабели связи, позволяющие передавать данные через корпус подводного аппарата. Аллум приобрел значительный опыт разработки электронных средств связи, используемых в погружениях Кэмерона Титаник при съемках Призраков бездны и др.
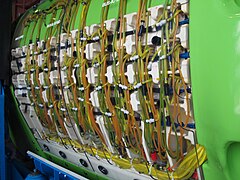
Системы питания для подводной лодки были поставлены литиевыми батареями, которые были помещены в пену и хорошо видны на рекламных фотографиях судна. Системы зарядки литиевых аккумуляторов были разработаны Роном Аллумом. Подводный аппарат содержит более 180 бортовых систем, включая батареи, двигатели, системы жизнеобеспечения, 3D-камеры и светодиодное освещение. Эти взаимосвязанные системы контролируются и контролируются (PAC) от Temecula, California - производителя средств управления Opto 22. Во время погружений система управления также записывала глубину, направление, температуру, давление, состояние батареи и другие данные и отправляла их на корабль поддержки с трехминутными интервалами через систему подводной акустической связи, разработанную West Австралийская компания L-3 Nautronix.
Ключевые структурные элементы, такие как каркас и пилотная сфера, на которых находился Кэмерон, были разработаны тасманской компанией Finite Elements. Дизайн внутренней части сферы, включая противопожарную защиту, предотвращение образования конденсата и установку контрольных узлов, был выполнен консалтинговой компанией Design + Industry из Сиднея.
 Панорамный вид Deepsea Challenger. Левая сторона - это верх подводной лодки.
Панорамный вид Deepsea Challenger. Левая сторона - это верх подводной лодки. Подводная лодка имеет пилотную сферу диаметром 1,1 метра (43 дюйма), достаточно большую для одного человека. Сфера со стальными стенками толщиной 64 мм (2,5 дюйма) была испытана на способность выдерживать необходимое давление в камере высокого давления 114 мегапаскалей (16500 фунтов на квадратный дюйм ). в Государственном университете Пенсильвании. Сфера находится в основании автомобиля грузоподъемностью 11,8- тонн (13,0- коротких тонн ). Транспортное средство работает в вертикальном положении и несет 500 кг (1100 фунтов) балластного веса, что позволяет ему как опускаться на дно, так и при отпускании подниматься на поверхность. Если система сброса балластного груза выходит из строя и судно оказывается на дне моря, резервный гальванический расцепитель предназначен для коррозии в соленой воде в течение определенного периода времени, позволяя подводной лодке автоматически всплывать на поверхность. Deepsea Challenger менее чем на одну десятую легче своего пятидесятилетнего предшественника, батискафа Trieste; современный автомобиль также имеет значительно больше научного оборудования, чем Триест, и способен к более быстрому подъему и спуску.

Верхняя часть содержит системы локации и освещения
Аккумуляторная батарея

Один из двигателей

Нижняя часть часть, внутри которой находится пилотная сфера. Вот контейнер, который использовался для перевозки балласта.

Модель пилотной сферы в натуральную величину

Люк и окно просмотра

Интерьер модели пилотной сферы
В конце января 2012 г. Для проверки систем Кэмерон провел три часа в подводном аппарате, находясь под водой на австралийской Сиднейской военно-морской верфи. 21 февраля 2012 года испытательное погружение, предназначенное для достижения глубины более 1000 м (3300 футов), было прервано всего через час из-за проблем с камерами и системами жизнеобеспечения. 23 февраля 2012 года, недалеко от острова Нью-Британ, Кэмерон успешно поднял подводный аппарат на дно океана на высоту 991 м (3251 фут), где встретился с желтым дистанционно управляемым аппаратом Управляется с корабля выше. 28 февраля 2012 года во время семичасового погружения Кэмерон провел шесть часов в подводном аппарате на глубине 3700 м (12 100 футов). Колебания в энергосистеме и непредвиденные токи создали неожиданные проблемы.
4 марта 2012 года рекордное погружение на глубину более 7260 м (23 820 футов) остановилось у дна желоба Новой Британии когда проблемы с вертикальными двигателями заставили Кэмерон вернуться на поверхность. Несколько дней спустя, когда техническая проблема была решена, Кэмерон успешно доставил подводный аппарат на дно желоба Новой Британии, достигнув максимальной глубины 8 221 м (26 972 фута). Там он нашел широкую равнину из рыхлых отложений, анемонов, медуз и различных мест обитания там, где равнина соединялась со стенами каньона.
18 марта 2012 года, после выхода из испытательной зоны в относительно спокойном море Соломона, подводный аппарат находился на борту надводного судна Mermaid Sapphire, пришвартованного в Гавань Апра, Гуам, проходит ремонт и модернизацию и ждет, пока океан будет достаточно спокойным, чтобы совершить погружение. К 24 марта 2012 года, выйдя из порта Гуама несколькими днями ранее, подводный аппарат находился на борту одного из двух надводных судов, вышедших с атолла Улити в Глубину Челленджера.
26 марта 2012 г. Сообщалось, что он достиг дна Марианской впадины.

 . Эти два графика показывают спуск и подъем Deepsea Challenger Джеймса Кэмерона во время этого рекордного погружения - время указано в UTC, поэтому погружение началось 25 марта и закончилось 26 марта, когда используется время UTC, но если используется время Гуама, все погружение произошло 26 марта 2012 года. Оба графика основаны на твитах Пола Аллена в то время, когда он был наблюдение за ходом погружения с помощью подводного телефона на своей яхте Octopus. Поступало не так много твитов, как было при спуске, поэтому данных по восхождению не так много.
. Эти два графика показывают спуск и подъем Deepsea Challenger Джеймса Кэмерона во время этого рекордного погружения - время указано в UTC, поэтому погружение началось 25 марта и закончилось 26 марта, когда используется время UTC, но если используется время Гуама, все погружение произошло 26 марта 2012 года. Оба графика основаны на твитах Пола Аллена в то время, когда он был наблюдение за ходом погружения с помощью подводного телефона на своей яхте Octopus. Поступало не так много твитов, как было при спуске, поэтому данных по восхождению не так много. Спуск от начала погружения до прибытия на морское дно занял два часа 37 минут, почти вдвое быстрее, чем спуск Триеста. Часы Rolex, «надетые» на роботизированную руку субмарины, продолжали нормально работать на протяжении всего погружения. Не все системы во время погружения работали так, как планировалось: спускаемые аппараты с приманкой не сбрасывались перед погружением, потому что гидролокатор, необходимый для их обнаружения на дне океана, не работал, а проблемы с гидравлической системой препятствовали использованию оборудования для отбора проб. Тем не менее, после примерно трех часов на морском дне и успешного восхождения дальнейшее исследование Глубины Челленджера с помощью уникальной подводной лодки было запланировано на более позднюю весну 2012 года.
26 марта В 2012 году Кэмерон достиг дна Челленджера, самой глубокой части Марианской впадины. Максимальная глубина, зафиксированная во время этого рекордного погружения, составила 10 908 метров (35 787 футов). Согласно измерениям Кэмерона, в момент приземления глубина составляла 10 898 м (35 756 футов). Это было четвертое погружение в Глубину Челленджера и второе погружение с участием человека (с максимальной зарегистрированной глубиной, немного меньшей, чем у Триеста в 1960 году). Это было первое одиночное погружение и первое, на изучение дна которого ушло значительное количество времени (три часа).
Deepsea Challenger был подарен Океанографическому институту Вудс-Хоул. за исследования своих технологических решений с целью внедрения некоторых из этих решений в другие аппараты для продвижения глубоководных исследований. 23 июля 2015 года он был доставлен из Океанографического института Вудс-Хоул в Балтимор для отправки в Австралию на временную ссуду. Находясь на грузовике с платформой на Interstate 95 в Коннектикуте, грузовик загорелся, что привело к повреждению подводной лодки. Вероятная причина возгорания - отказ тормозов грузовика, в результате которого загорелись задние колеса. Чиновники пожарной охраны Коннектикута предположили, что для Deepsea Challenger это была полная потеря; однако о фактических масштабах ущерба не сообщается. После пожара аппарат был доставлен обратно в Океанографический институт Вудс-Хоул. По состоянию на февраль 2016 года он был перемещен в Калифорнию для ремонта.
По состоянию на февраль 2012 года несколько других автомобилей находятся в стадии разработки, чтобы достичь той же глубины. Группы, разрабатывающие их, включают: