
Войти
 ROV во время работы на подводном нефтегазовом месторождении. ROV управляет подводным динамометрическим инструментом (гаечный ключ ) на клапане на подводной конструкции.
ROV во время работы на подводном нефтегазовом месторождении. ROV управляет подводным динамометрическим инструментом (гаечный ключ ) на клапане на подводной конструкции. A подводный аппарат с дистанционным управлением (технически ROUV, но обычно просто ROV ) - это привязанное подводное мобильное устройство.
Это значение отличается от транспортных средств с дистанционным управлением, работающих на земле или в воздухе. ТНПА не заняты, обычно обладают высокой маневренностью и управляются экипажем либо на борту судна / плавучей платформы, либо на ближайшей суше. Они распространены в глубоководных отраслях, таких как морская добыча углеводородов. Они связаны с принимающим кораблем нейтрально плавучим тросом или, часто при работе в суровых условиях или на более глубокой воде, используется несущий шлангокабель вместе с тросом. система (ТМС). TMS представляет собой устройство типа гаража, которое содержит ROV во время опускания через зону разбрызгивания, или, на более крупных ROV рабочего класса, отдельную сборку, которая устанавливается на ROV. Целью TMS является удлинение и укорочение страховочного троса, чтобы свести к минимуму влияние сопротивления кабеля при наличии подводных течений. Пуповинный кабель представляет собой армированный кабель, который содержит группу электрических проводников и волоконную оптику, по которым передаются сигналы электроэнергии, видео и данных между оператором и TMS. Там, где он используется, TMS затем передает сигналы и питание для ROV по тросу. Попадая в ROV, электроэнергия распределяется между компонентами ROV. Однако в приложениях с большой мощностью большая часть электроэнергии приводит в движение мощный электродвигатель, который приводит в действие гидравлический насос. Затем насос используется для приведения в движение и для питания оборудования, такого как динамометрические инструменты и манипуляторы, где электродвигатели было бы слишком сложно реализовать под водой. Большинство ROV оснащены как минимум видеокамерой и освещением. Для расширения возможностей автомобиля обычно добавляется дополнительное оборудование. Сюда могут входить гидролокаторы, магнитометры, фотокамера, манипулятор или режущий рычаг, пробоотборники воды и инструменты, которые измеряют прозрачность воды, температуру воды, плотность воды, скорость звука, проникновение света., и температура.
 A Королевский флот ROV (Котлет) впервые использовался в 1950-х годах для извлечения учебных торпед и мин
A Королевский флот ROV (Котлет) впервые использовался в 1950-х годах для извлечения учебных торпед и мин В 1970-х и 80-х годах Королевский флот использовали подводный аппарат с дистанционным управлением «Котлет» для извлечения учебных торпед и мин. RCA (Noise) поддерживал систему «Котлет 02», базирующуюся на диапазонах BUTEC, в то время как система «03» базировалась на базе подводных лодок на Клайде и обслуживалась и обслуживалась персоналом RN.
США Военно-морской флот профинансировал большую часть ранних технологических разработок ROV в 1960-х годах в то, что тогда было названо «подводным спасательным аппаратом с кабельным управлением» (CURV). Это дало возможность проводить глубоководные спасательные операции и восстанавливать объекты со дна океана, например, ядерную бомбу, потерянную в результате крушения 1966 г. Palomares B-52. Опираясь на эту технологическую базу; морская нефтегазовая промышленность создала рабочие ТПА для помощи в разработке морских нефтяных месторождений. Спустя более чем десятилетие после того, как они были впервые представлены, ROV стали незаменимыми в 1980-х, когда большая часть новых морских разработок вышла за пределы досягаемости дайверов. В середине 1980-х годов отрасль морских ROV пережила серьезный застой в технологическом развитии, частично вызванный падением цен на нефть и глобальной экономической рецессией. С тех пор технологическое развитие в индустрии ROV ускорилось, и сегодня ROV выполняет множество задач во многих областях. Их задачи варьируются от простого обследования подводных конструкций, трубопроводов и платформ до соединения трубопроводов и размещения подводных коллекторов. Они широко используются как при первоначальном строительстве подводных сооружений, так и при последующем ремонте и техническом обслуживании.
Погружные ROV использовались для обнаружения многих исторических кораблекрушений, включая RMS Titanic, Бисмарк, USS Yorktown и SS Central America. В некоторых случаях, таких как Титаник и SS Central America, ROV использовались для извлечения материала со дна моря и его вывода на поверхность.
В то время как в нефтегазовой отрасли используется большинство ROV, другие области применения включают науку, военное дело и спасательные работы. Военные используют ROV для таких задач, как разминирование и осмотр мин. Использование науки обсуждается ниже.
В профессиональном дайвинге и морской индустрии обычно используется термин ROV для дистанционно управляемого транспортного средства. Более точный термин, дистанционно управляемый подводный аппарат или ROUV, используется реже, поскольку различие, как правило, не требуется в этой области, где основной тип дистанционно управляемого аппарата используется под водой.
ТПА рабочего класса построены с большим плавучести на верхней части алюминиевого шасси, чтобы обеспечить необходимую плавучесть для выполнения разнообразных задач. Сложность конструкции алюминиевого каркаса варьируется в зависимости от дизайна производителя. Синтаксическая пена часто используется для флотационного материала. В нижней части системы может быть установлен инструментальный блок для размещения различных датчиков или комплектов инструментов. Благодаря размещению легких компонентов сверху и тяжелых компонентов снизу, вся система в целом имеет большое расстояние между центром плавучести и центром тяжести : это обеспечивает устойчивость и жесткость для работы под водой.. Подруливающие устройства размещаются между центром плавучести и центром тяжести, чтобы поддерживать стабильность положения робота при маневрах. Различные конфигурации подруливающих устройств и алгоритмы управления могут использоваться для обеспечения надлежащего управления положением и ориентацией во время операций, особенно в водах с сильным течением. Двигатели обычно имеют сбалансированную векторную конфигурацию для обеспечения наиболее точного управления.
Электрические компоненты могут находиться в маслонаполненных водонепроницаемых отсеках или отсеках с атмосферой, чтобы защитить их от коррозии в морской воде и раздавливания из-за экстремального давления, оказываемого на ROV во время работы на глубине. ТНПА будет оснащен камерами, фонарями и манипуляторами для выполнения основных работ. Дополнительные датчики и инструменты могут быть установлены по мере необходимости для решения конкретных задач. Обычно можно встретить ТПА с двумя роботизированными руками; у каждого манипулятора может быть своя захватная губка. Камеры также могут быть защищены от столкновений. ROV может быть оборудован оборудованием Sonar и LiDAR.
Большинство ROV рабочего класса построено, как описано выше; однако это не единственный стиль в методе построения ROV. Меньшие ROV могут иметь очень разную конструкцию, каждый из которых соответствует своей предполагаемой задаче. Более крупные ROV обычно развертываются и управляются с судов, поэтому ROV может иметь посадочные салазки для подъема на палубу.
Дистанционно управляемые автомобили имеют три основных конфигурации. Каждый из них имеет определенные ограничения.
ROV для обследования или инспекции обычно меньше, чем ROV рабочего класса, и часто подразделяются на либо класс I: только наблюдение, либо наблюдение класса II с полезной нагрузкой. Они используются для оказания помощи в гидрографических исследованиях, то есть для определения местоположения и размещения подводных конструкций, а также для инспекционных работ, например, обследований трубопроводов, обследований кожухов и морских корпусов судов. Съемочные ROV (также известные как «глазные яблоки»), хотя и меньше рабочего класса, часто имеют сопоставимые характеристики в отношении способности удерживать позицию в потоках и часто несут аналогичные инструменты и оборудование - освещение, камеры, сонар, USBL (сверхкороткая базовая линия ) маяка и стробоскопа в зависимости от грузоподъемности транспортного средства и потребностей пользователя.
ТПА на протяжении десятилетий использовались несколькими военно-морскими силами, в основном для поиска мин и разминирования.
 Машина обезвреживания мин AN / SLQ-48
Машина обезвреживания мин AN / SLQ-48 В октябре 2008 года ВМС США приступили к совершенствованию своих локально пилотируемых спасательных систем на основе Mystic DSRV и вспомогательных судов с модульной системой, SRDRS, основанный на привязанном, управляемом ROV, называется герметичным спасательным модулем (PRM). Это последовало за годами испытаний и учений с подводными лодками флотов нескольких стран. Он также использует беспилотный подводный аппарат Sibitzsky для обследования выведенных из строя подводных лодок и подготовки подводной лодки к PRM.
ВМС США также используют ROV под названием AN / SLQ-48 для нейтрализации мин (MNV) для мин войны. Он может уйти на 1000 ярдов от корабля из-за соединительного кабеля и может достигать глубины 2000 футов. Пакеты миссий, доступные для MNV, известны как MP1, MP2 и MP3.
Заряды взрываются акустическим сигналом с корабля.
Автономный беспилотный подводный аппарат (БПЛА) AN / BLQ-11 разработан для скрытого противоминного противодействия и может запускаться с некоторых подводных лодок.
ТНПА ВМС США есть только на кораблях противоминной защиты типа "Мститель". Только после заземления USS Guardian (MCM-5) и вывода из эксплуатации USS Avenger (MCM-1) и USS Defender (MCM-2) 11 американских тральщиков продолжают действовать в прибрежных водах Бахрейна (USS Sentry (MCM-3), USS Devastator (MCM-6), USS Gladiator (MCM-11) и USS Dextrous (MCM-13) ), Япония (USS Patriot (MCM-7), USS Pioneer (MCM-9), USS Warrior (MCM-10) и USS Chief (MCM-14) ) и Калифорния (USS Champion (MCM-4), USS Scout (MCM-8) и USS Ardent (MCM-12) ).
19 августа 2011 года роботизированная подводная лодка Boeing, получившая название Echo Ranger проходил испытания на предмет возможного использования американскими военными для преследования вод противника, патрулирования местных гаваней на предмет угроз национальной безопасности и прочесывания дна океана для обнаружения экологических опасностей. ВМС Норвегии проинспектировали корабль Helge Ingstad норвежским Blueye Pioneer подводный дрон.
Как их способности связи растут, более мелкие ROV также все чаще используются военно-морскими силами, береговой охраной и портовыми властями по всему миру, в том числе Береговой охраной США и ВМС США, Королевским флотом Нидерландов, ВМС Норвегии, Королевским флотом и пограничной службой Саудовской Аравии. Они также широко используются полицейскими управлениями и поисково-спасательными группами. Полезно для множества задач подводного осмотра, таких как обезвреживание взрывоопасных предметов (EOD), метеорология, безопасность портов, противоминные меры (MCM) и морская разведка, наблюдение, разведка (ISR).
 Снимок, сделанный с помощью ROV криля, питающегося ледяными водорослями в Антарктиде.
Снимок, сделанный с помощью ROV криля, питающегося ледяными водорослями в Антарктиде. Научный ROV, полученный с помощью океанографического исследовательского судна .
Научный ROV, полученный с помощью океанографического исследовательского судна . 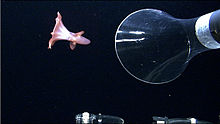 Всасывающее устройство ROV собирается захватить образец глубоководного осьминога Cirroteuthis muelleri
Всасывающее устройство ROV собирается захватить образец глубоководного осьминога Cirroteuthis muelleri ROV также широко используются научным сообществом для изучения океана. Ряд глубоководных животных и растений был обнаружен или изучен в их естественной среде с использованием ТПА; Примеры включают медузу Stellamedusa ventana и угревидных галозавров. В США передовые работы проводятся в нескольких государственных и частных океанографических учреждениях, включая Исследовательский институт аквариумов Монтерей-Бей (MBARI), Океанографический институт Вудс-Хоул (WHOI) (с Nereus ) и Университета Род-Айленда / Исследовательский институт (URI / IFE).
ТПА для научных исследований бывают разных форм и размеров. Поскольку качественные видеоматериалы являются основным компонентом большинства глубоководных научных исследований, исследовательские ROV, как правило, оснащаются мощными системами освещения и камерами вещательного качества. В зависимости от проводимых исследований научный ROV будет оснащен различными устройствами для отбора проб и датчиками. Многие из этих устройств представляют собой уникальные современные экспериментальные компоненты, сконфигурированные для работы в экстремальных условиях глубокого океана. Научно-исследовательские ROV также включают в себя множество технологий, которые были разработаны для коммерческого сектора ROV, такие как гидравлические манипуляторы и высокоточные подводные навигационные системы. Они также используются для проектов подводной археологии, таких как проект кораблекрушения Марди Гра в Мексиканском заливе и проект CoMAS в Средиземном море.
Хотя есть много интересных и уникальных ROV для науки, есть несколько более крупных высокопроизводительных систем, на которые стоит обратить внимание. Транспортное средство Tiburon от MBARI обошлось в разработку более 6 миллионов долларов США и используется в основном для средних и гидротермальных исследований на западном побережье США. Система WHOI Jason внесла значительный вклад в глубоководные океанографические исследования и продолжает работать по всему миру. URI / IFE Hercules ROV - один из первых научных ROV, который полностью включает в себя гидравлическую двигательную установку и уникально оснащен для исследования и раскопок древних и современных кораблекрушений. Канадская научная подводная система ROPOS постоянно используется несколькими ведущими океанографическими институтами и университетами для решения сложных задач, таких как восстановление и разведка глубоководных жерл до обслуживания и развертывания океанских обсерваторий.
Образовательная программа SeaPerch Дистанционно управляемый подводный аппарат (ROV) - это образовательный инструмент и комплект, который позволяет ученикам начальной, средней и старшей школы конструировать простой дистанционно управляемый подводный аппарат от трубы из поливинилхлорида (ПВХ) и другие готовые материалы. Программа SeaPerch обучает студентов базовым навыкам проектирования кораблей и подводных лодок и побуждает студентов изучать концепции военно-морской архитектуры и морской и морской инженерии. SeaPerch спонсируется Управлением военно-морских исследований в рамках Национальной военно-морской ответственности за военно-морское машиностроение (NNRNE), а программа управляется Обществом военно-морских архитекторов и морских инженеров.
Еще одно новаторское использование технологии ROV было во время проекта кораблекрушения Марди Гра. «Марди Гра» затонул около 200 лет назад примерно в 35 милях от побережья Луизианы в Мексиканском заливе на глубине 4000 футов (1220 метров). Обломки корабля, подлинная личность которых остается загадкой, лежали в забытом виде на дне моря, пока не были обнаружены в 2002 году инспекционной бригадой нефтяных месторождений, работающей на Okeanos Gas Gathering Company (OGGC). В мае 2007 года была запущена экспедиция, возглавляемая Техасским университетом AM и финансируемая OGGC по соглашению со Службой управления минералами (ныне BOEM ), с целью проведения самых глубоких научных археологических раскопок, когда-либо предпринимавшихся в то время. изучать место на морском дне и находить артефакты для возможного публичного показа в Государственном музее Луизианы. В рамках образовательной программы Nautilus Productions в партнерстве с BOEM, Техасским университетом AM, Florida Public Archeology Network и Veolia Environmental выпустили часовой документальный фильм в формате HD. о проекте, короткие видеоролики для публичного просмотра и предоставленные видео-обновления во время экспедиции. Видеозаписи с ROV были неотъемлемой частью этой кампании и широко использовались в документальном фильме о кораблекрушении Mystery Mardi Gras.
Центр (MATE) использует ROV для обучения учащихся средних и старших классов, общественных колледжей и университетов о карьере, связанной с океаном, и помочь им улучшить свои научные, технические, инженерные и математические навыки. Ежегодный конкурс MATE для студентов ROV заставляет студенческие команды со всего мира соревноваться с ROV, которые они проектируют и строят. В конкурсе используются реалистичные миссии на базе ROV, которые имитируют высокопроизводительную рабочую среду, уделяя особое внимание другой теме, которая знакомит студентов со многими различными аспектами технических навыков и профессий, связанных с морской деятельностью. Конкурс ROV организован MATE и Комитетом ROV Общества морских технологий и финансируется такими организациями, как Национальное управление по аэронавтике и исследованию космического пространства (НАСА), Национальное управление по исследованию океана и атмосферы (NOAA)., и Oceaneering, и многие другие организации, которые признают ценность высококвалифицированных студентов, обладающих технологическими навыками, такими как проектирование, инженерия и пилотирование ROV. Компания MATE была основана при финансировании Национального научного фонда, ее штаб-квартира находится в Колледже полуострова Монтерей в Монтерее, Калифорния.
В качестве камер и датчики эволюционировали, и транспортные средства стали более маневренными и простыми в управлении, ROV стали популярны, в частности, у кинематографистов из-за их способности проникать в глубокие, опасные и замкнутые области, недоступные для дайверов. Нет ограничений на то, как долго ROV может находиться в воде и снимать кадры, что позволяет получить ранее невидимые перспективы. ТПА использовались при съемках нескольких документальных фильмов, включая «Акулы-люди» Нат Гео и «Темные секреты» Лузитании и BBC Wildlife Special «Шпион в толпе».
Благодаря их широкому использованию в вооруженных силах, правоохранительных органах и службах береговой охраны, ROV также фигурировали в криминальных драмах, таких как популярный сериал CBS CSI.
С повышенным интересом к океану многих людей, как молодыми, так и старыми, а также увеличением доступности некогда дорогого и некоммерческого оборудования, ТПА стали популярным хобби среди многих. Это хобби связано с конструированием небольших ROV, которые обычно изготавливаются из труб из ПВХ и часто могут погружаться на глубину от 50 до 100 футов, но некоторым удалось достичь глубины 300 футов. Этот новый интерес к ROV привел к созданию множества соревнований, в том числе MATE (морское образование передовых технологий) и NURC (National Underwater Robotics Challenge). Это соревнования, в которых участники, чаще всего школы и другие организации, соревнуются друг с другом в серии задач с использованием созданных ими ROV. Большинство любительских ROV проходят испытания в плавательных бассейнах и озерах со спокойной водой, однако некоторые из них тестировали свои собственные ROV в море. Однако это создает множество трудностей из-за волн и течений, которые могут привести к отклонению ROV от курса или из-за небольшого размера двигателей, которые установлены на большинстве ROV-любителей.
Погружные ТПА обычно классифицируются по категориям в зависимости от их размера, веса, возможностей или мощности. Вот некоторые общие характеристики:
Погружные ROV могут «плавать в свободном плавании», когда они работают с нейтральной плавучестью на привязи от корабля-носителя или платформы, или они могут быть «помещены в гараж» там, где они работают с подводный «гараж» или «шляпа-цилиндр» на тросе, прикрепленный к тяжелому гаражу, спускаемому с корабля или платформы. У обоих методов есть свои плюсы и минусы; однако очень глубокие работы обычно выполняются в гараже.
| На Викискладе есть материалы, относящиеся к Дистанционно управляемые подводные аппараты. |