Движение поршня без смещения, соединенного с кривошипом через шатун (как можно найти в двигатели внутреннего сгорания ), можно выразить с помощью нескольких математических уравнений. В этой статье показано, как выводятся эти уравнения движения, и показан пример графика.
Содержание
- 1 Геометрия коленчатого вала
- 1.1 Определения
- 1.2 ″ Угловая скорость ″
- 1.3 Соотношение треугольника
- 2 Уравнения относительно углового положения (угловая область)
- 2.1 Положение
- 2.2 Скорость
- 2.3 Ускорение
- 3 Уравнения относительно времени (временная область)
- 3.1 Производные угловой скорости
- 3.2 Преобразование из угловой области во временную область
- 3.3 Положение
- 3.4 Скорость
- 3.5 Ускорение
- 3.6 Масштабирование угловой скорости
- 4 Максимумы / минимумы скорости
- 4.1 Переход через нулевую точку ускорения
- 4.2 Угол поворота шатуна не является прямым
- 4.3 Пример
- 5 Пример графика движение поршня
- 6 См. также
- 7 Ссылки
- 8 Дополнительная литература
- 9 Внешние ссылки
Геометрия коленчатого вала

Диаграмма, показывающая геометрическое расположение поршневого пальца, кривошипного пальца и центра кривошипа
Определения
 длина штока (расстояние между поршневым пальцем и коленчатым пальцем ).
длина штока (расстояние между поршневым пальцем и коленчатым пальцем ). кривошипом радиус (расстояние между кривошипом p в и центр кривошипа, т.е. половина хода ).
кривошипом радиус (расстояние между кривошипом p в и центр кривошипа, т.е. половина хода ). угол поворота коленчатого вала (от цилиндра осевой линии отверстия в ВМТ ).
угол поворота коленчатого вала (от цилиндра осевой линии отверстия в ВМТ ). положение поршневого пальца (вверх от центра кривошипа по средней линии отверстия цилиндра).
положение поршневого пальца (вверх от центра кривошипа по средней линии отверстия цилиндра). скорость поршневого пальца ( вверх от центра кривошипа по средней линии отверстия цилиндра).
скорость поршневого пальца ( вверх от центра кривошипа по средней линии отверстия цилиндра). ускорение поршневого пальца (вверх от центра кривошипа по средней линии отверстия цилиндра).
ускорение поршневого пальца (вверх от центра кривошипа по средней линии отверстия цилиндра). коленчатый вал угловая скорость
коленчатый вал угловая скорость
″ угловая скорость ″
коленчатый вал угловая скорость относится к двигателю оборотов в минуту (об / мин):

отношение треугольника
Как показано на схеме, шатун, центр кривошипа и поршневой палец образуют треугольник NOP.. По закону косинуса видно, что:.

Уравнения относительно углового положения (угловая область)
Следующие уравнения описывают возвратно-поступательное движение поршня относительно угла поворота коленчатого вала.. Примеры графиков этих уравнений показаны ниже.
Положение
Положение относительно угла поворота коленчатого вала (путем изменения соотношения треугольника):

![l ^ {2} -r ^ {2} = x ^ {2} -2 \ cdot r \ cdot x \ cdot \ cos A + r ^ {2} [(\ cos ^ {2} A + \ sin ^ {2} A) -1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/5d70a7c30eacd6c3c5cd100f37edab327cb15972)




Скорость
Скорость относительно до угла поворота коленчатого вала (возьмите первую производную, используя цепное правило ):

- Скорость отрицательна, когда x уменьшается со временем (A < 180 degrees) and is positive when x increases with time(A>180 градусов). Величина второго члена всегда меньше rsinA и, следовательно, не влияет на знак (так как l>= 2 * r).
Acceleration
Ускорение относительно угла поворота коленчатого вала (возьмите секунду производная, используя правило цепочки и правило частного ):

Уравнения относительно времени (временная область)
Производные угловой скорости
Если угловая скорость постоянна, то

и применяются следующие соотношения:


Преобразование из угловой области во временную область
Следующие уравнения описывают возвратно-поступательное движение поршня во времени. Если вместо угловой области требуется временная область, сначала замените A на ωt в уравнениях, а затем scale для угловой скорости следующим образом:
Position
Положение относительно времени просто:

Скорость
Скорость относительно времени (с использованием правила цепочки ):

Ускорение
Ускорение по времени (с использованием правила цепочки и правила продукта, и производные угловой скорости ):

Масштабирование угловой скорости
Вы можете видеть, что x не масштабируется, x 'масштабируется на ω, а x "масштабируется на ω². Чтобы преобразовать x 'из скорости в зависимости от угла [дюйм / рад] в скорость в зависимости от времени [дюйм / с], умножьте x' на ω [рад / с]. Чтобы преобразовать x "из ускорения в зависимости от угла [дюйм / рад²] в ускорение в зависимости от времени [дюйм / с²], умножьте x» на ω² [рад² / с²]. Обратите внимание, что анализ размеров показывает, что единицы согласованы.
Максимумы / минимумы скорости
Переходы через ноль ускорения
Максимумы и минимумы скорости не возникают при углах поворота коленчатого вала (A) плюс или минус 90 °. Максимумы и минимумы скорости возникают при углах поворота коленчатого вала, которые зависят от длины штока (l) и половины хода (r), и соответствуют углам поворота коленчатого вала, где ускорение равно нулю (пересечение горизонтальной оси).
Угол поворота кривошипа неправильный
Максимумы и минимумы скорости не обязательно возникают, когда кривошип находится под прямым углом к штоку. Существуют контрпримеры, чтобы опровергнуть идею о том, что максимумы / минимумы скорости возникают, когда угол поворота коленчатого вала является прямым.
Пример
Для длины штока 6 дюймов и радиуса кривошипа 2 дюйма численное решение пересечений нуля ускорения обнаруживает, что максимумы / минимумы скорости находятся при углах поворота кривошипа ± 73,17615 °. Затем, используя закон синусоидального треугольника, можно найти, что угол поворота шатуна составляет 88,21738 °, а угол стержня по вертикали равен 18,60647 °. Очевидно, что в этом примере угол между кривошипом и стержнем не является прямым. Суммируя углы треугольника 88,21738 ° + 18,60647 ° + 73,17615 °, получаем 180,00000 °. Единственного контрпримера достаточно, чтобы опровергнуть утверждение «максимумы / минимумы скорости возникают, когда кривошип делает прямой угол со штоком».
Пример графика движения поршня
На графике показаны x, x ', x "относительно угла поворота коленчатого вала для различных половин хода, где L = длина штока (l) и R = половина хода (r):
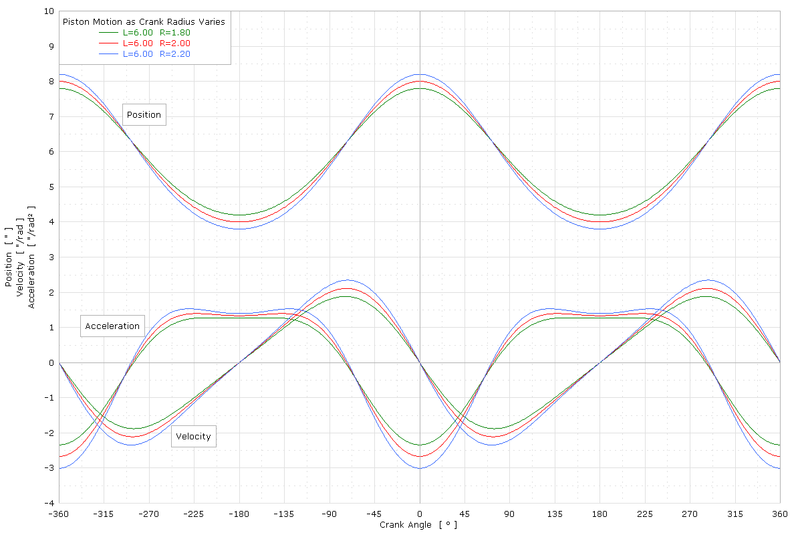
Единицы измерения по вертикальной оси:
дюймы для положения, [дюймы / рад] для скорости, [дюймы / рад²] для ускорения.. Единицы измерения по горизонтальной оси - угол поворота коленчатого вала
градусов.
Анимация движения поршня с одинаковыми значениями длины штока и радиуса кривошипа на графике выше:.
Анимация движения поршня с различными половинными ходами
См. также
Ссылки
Дополнительная литература
- Джон Бенджамин Хейвуд, Основы двигателя внутреннего сгорания, McGraw Hill, 1989.
- Чарльз Файетт Тейлор, Двигатель внутреннего сгорания в теории и практике, том 1 и 2, 2-е издание, MIT Press, 1985.
Внешние ссылки
- epi-eng Код движения поршня
- cogs Скорость и ускорение поршня
- Анимированные двигатели Четырехтактный двигатель
- desmos интерактивная анимация кривошипа
- networcs Механизмы DT - Интерактивные инструменты для учителей
- mecamedia Анимация движения поршня
- youtube Вращающийся короткий блок chevy 350.
- youtube 3D-анимация ДВИГАТЕЛЯ V8
- youtube Внутри двигателя V8 на холостом ходу
- desmos интерактивный ход в зависимости от соотношения штока и положения поршня

 Диаграмма, показывающая геометрическое расположение поршневого пальца, кривошипного пальца и центра кривошипа
Диаграмма, показывающая геометрическое расположение поршневого пальца, кривошипного пальца и центра кривошипа  Единицы измерения по вертикальной оси: дюймы для положения, [дюймы / рад] для скорости, [дюймы / рад²] для ускорения.. Единицы измерения по горизонтальной оси - угол поворота коленчатого вала градусов.
Единицы измерения по вертикальной оси: дюймы для положения, [дюймы / рад] для скорости, [дюймы / рад²] для ускорения.. Единицы измерения по горизонтальной оси - угол поворота коленчатого вала градусов. Анимация движения поршня с различными половинными ходами
Анимация движения поршня с различными половинными ходами