
Войти
 Художественный образ орбитального аппарата «Викинг», запускающего спускаемый аппарат Художественный образ орбитального аппарата «Викинг», запускающего спускаемый аппарат | |
| Производитель | Лаборатория реактивного движения / Мартин Мариетта |
|---|---|
| Страна происхождения | США |
| Оператор | НАСА / JPL |
| Приложения | Марсианский орбитальный аппарат / посадочный модуль |
| Технические характеристики | |
| Расчетный срок службы | Орбитальные аппараты: 4 года на Марсе. Ландерс: 4–6 лет на Марсе |
| Стартовая масса | 3527 кг (7776 фунтов) |
| Мощность | Орбитальные аппараты: 620 Вт (солнечная батарея ). Посадочный модуль: 70 Вт (два RTG единиц) |
| Режим | Ареоцентрический |
| Размеры | |
| Производство | |
| Статус | Списанный |
| Построен | 2 |
| Спущен на воду | 2 |
| Списанный | Viking 1 орбитальный аппарат. 17 августа 1980 г.. посадочный модуль "Викинг 1". 20 июля 1976 г. (посадка) по 13 ноября 1982 г... орбитальный аппарат "Викинг 2 ". 25 июля, 1978. Викинг 2 спускаемый аппарат. сентябрь с 3 сентября 1976 г. (посадка) по 11 апреля 1980 г. |
| Первый запуск | Viking 1. 20 августа 1975 г. |
| Последний запуск | Viking 2. 9 сентября, 1975 |
Программа Viking состояла из пары американских космических зондов, отправленных на Марс, Viking 1 и Викинг 2. Каждый космический корабль состоял из двух основных частей: орбитального аппарата, предназначенного для фотографирования поверхности Марса с орбиты, и посадочного модуля, предназначенного для изучать планету с поверхности. Орбитальные аппараты также служили ретрансляторами связи для посадочных устройств после того, как они приземлились.
Программа «Викинг» выросла из более ранней, более амбициозной программы НАСА, «Вояджер» Марс, которая не имела отношения к успешным космическим зондам «Вояджер». конца 1970-х гг. Викинг-1 был спущен на воду 20 августа 1975 года, а второй корабль, Викинг 2, был спущен на воду 9 сентября 1975 года, оба летали на ракетах Titan IIIE с верхними ступенями Centaur. "Викинг-1" вышел на орбиту Марса 19 июня 1976 года, а "Викинг-2" последовал его примеру 7 августа.
После более чем месяца на орбите Марса и получения изображений, используемых для выбора места посадки, орбитальные аппараты и посадочные аппараты отсоединились; Затем спускаемые аппараты вошли в марсианскую атмосферу и совершили мягкую посадку в выбранных местах. Посадочный модуль «Викинг-1» приземлился на поверхности Марса 20 июля 1976 г., а 3 сентября к нему присоединился спускаемый модуль «Викинг-2». Орбитальные аппараты продолжали снимать изображения и выполнять другие научные операции с орбиты, в то время как на посадочных модулях было развернуто инструментов на поверхности.
Стоимость проекта составляет примерно 1 миллиард долларов США в долларах 1970-х годов, что эквивалентно примерно 5 миллиардам долларов США в долларах 2019 года. Миссия была признана успешной и помогла сформировать большую часть знаний о Марсе в конце 1990-х - начале 2000-х годов.
Основными задачами двух орбитальных аппаратов "Викинг" была транспортировка спускаемых аппаратов на Марс., выполнять разведку для определения местоположения и сертификации мест приземления, действовать в качестве ретранслятора для посадочных устройств и проводить свои собственные научные исследования. Каждый орбитальный аппарат, основанный на более раннем космическом корабле Mariner 9, имел восьмиугольник примерно 2,5 м в поперечнике. Пара заправленных топливом орбитальный аппарат-посадочный модуль имела массу 3527 кг. После отделения и посадки посадочный модуль имел массу около 600 кг, а орбитальный аппарат - 900 кг. Общая стартовая масса составляла 2328 кг, из которых 1445 кг составляло топливо и газ для управления ориентацией. Восемь граней кольцеобразной структуры имели высоту 0,4572 м и попеременно 1,397 и 0,508 м шириной. Общая высота от точек крепления спускаемого аппарата снизу до точек крепления ракеты-носителя наверху составляла 3,29 м. Было 16 модульных отсеков, по 3 на каждой из 4 длинных граней и по одному на каждой короткой стороне. Четыре крыла солнечных панелей простирались от оси орбитального аппарата, расстояние от вершины до вершины двух вытянутых в противоположных направлениях солнечных батарей составляло 9,75 м.
Основная двигательная установка была установлена над орбитальной шиной . Силовая установка была снабжена двухкомпонентным ракетным топливом (монометилгидразин и тетроксид азота ) жидкостным ракетным двигателем , который мог карданный до 9 градусов. Двигатель был способен развивать тягу 1323 Н (297 фунт-сила ), обеспечивая изменение скорости на 1480 м / с. Контроль отношения достигался с помощью 12 небольших струй сжатого азота.
Сбор данных Датчик Солнца, Датчик Солнца в режиме круиза, Canopus звездный трекер и инерциальный эталонный блок, состоящий из шести гироскопов, допускал трехосную стабилизацию. Также на борту находились два акселерометра . Связь осуществлялась через передатчик 20 Вт S-диапазона (2,3 ГГц ) и два 20 Вт TWTA. Также был добавлен диапазон X (8,4 ГГц) нисходящий канал специально для радионауки и для проведения экспериментов в области связи. Восходящий канал был через S-диапазон (2,1 ГГц). Двухосная управляемая параболическая тарелочная антенна диаметром приблизительно 1,5 м была прикреплена к одному краю базы орбитального аппарата, а фиксированная антенна с низким усилением выходила из верхней части автобуса. Два магнитофона были способны хранить 1280 мегабит каждый. Также было доступно реле с ретрансляцией 381- МГц.
Электропитание двух орбитальных аппаратов обеспечивали восемь солнечных панелей размером 1,57 × 1,23 м , по две на каждом крыле. Солнечные панели состояли из 34 800 солнечных элементов и производили на Марсе 620 Вт энергии. Питание также сохранялось в двух никель-кадмиевых 30-A·h батареях.
Общая площадь четырех панелей составляла 15 квадратных метров (160 квадратных футов), и они обеспечивали как регулируемую, так и нерегулируемую мощность постоянного тока; нерегулируемое питание подавалось на радиопередатчик и спускаемый аппарат.
Две никель-кадмиевые аккумуляторные батареи на 30 ампер-час обеспечивали питание, когда космический корабль не был обращен к Солнцу, а также во время запуска, корректирующих маневров и покрытия Марса.
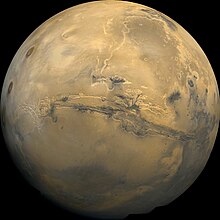 Мозаика изображения Марса с орбитального аппарата "Викинг-1"
Мозаика изображения Марса с орбитального аппарата "Викинг-1" Обнаружив множество геологических форм, которые обычно образуются из большого количества воды, изображения с орбитального аппарата произвели революцию в наших представлениях о воде на Марсе. Во многих районах были обнаружены огромные речные долины. Они показали, что наводнения прорывали плотины, вырезали глубокие долины, размывали борозды в коренных породах и распространялись на тысячи километров. На больших территориях в южном полушарии имелись разветвленные сети ручьев, что позволяет предположить, что когда-то шел дождь. Считается, что склоны некоторых вулканов подвергались воздействию дождя, потому что они напоминают вулканы на Гавайях. Многие кратеры выглядят так, как будто ударник упал в грязь. Когда они образовались, лед в почве мог растаять, превратить землю в грязь, а затем растечься по поверхности. Обычно материал от удара поднимается, а затем опускается. Он не течет по поверхности, огибая препятствия, как в некоторых марсианских кратерах. Области, называемые «Хаотическая местность », казалось, быстро потеряли большие объемы воды, в результате чего образовались большие каналы. Количество вовлеченной воды было оценено в десять тысяч раз больше потока реки Миссисипи. Подземный вулканизм мог растопить замерзший лед; затем вода утекла, и земля рухнула, оставив хаотичный ландшафт.

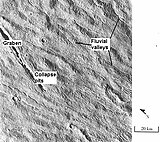
Обтекаемые острова показывают, что на Марсе происходили большие наводнения.. (Четырехугольник Lunae Palus )
Образцы размыва были созданы текущей водой. Кратер Дромор находится на дне.. (Четырехугольник Lunae Palus )

Большие потоки воды вероятно, разрушил каналы вокруг кратера Дромор.. (Четырехугольник Lunae Palus )

Острова в форме капли, вырезанные наводнением из Ares Vallis.. (Четырехугольник Oxia Palus )

Изображение трех долин: Vedra Valles, Maumee Valles и Maja Valles.. (Lunae Palus quadrangle )

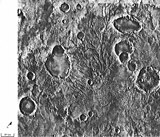
кратер Arandas может быть на вершине большого количество водяного льда, который таял при столкновении, создавая грязевые выбросы.. (Mare Acidalium quadrangle )
Каналы, проходящие через Alba Mons.. (Arcadia quadrangle )

Разветвленные каналы в Четырехугольник Таумазии дают возможное свидетельство прошедшего дождя на Марсе.
Эти разветвленные каналы дают возможное свидетельство прошедшего дождя на Марсе. (Четырехугольник Маргаритифер Синус )

Рави Валлис, возможно, был сформированный от сильного затопления.. (Четырехугольник Margaritifer Sinus )
 Карл Саган с моделью посадочного модуля викингов.
Карл Саган с моделью посадочного модуля викингов.  Фоновая картина Дона Дэвиса, Художественная концепция поверхности Марса за посадочным модулем викингов тестовый образец, изображенный в JPL. «Песочница».
Фоновая картина Дона Дэвиса, Художественная концепция поверхности Марса за посадочным модулем викингов тестовый образец, изображенный в JPL. «Песочница». Каждый посадочный модуль состоял из шестигранной алюминиевой основы с чередующимися сторонами 1,09 и 0,56 м (3 фута 7 дюймов и 1 фут 10 дюймов), поддерживаемых тремя удлиненными опорами, прикрепленными к Короткие стороны. Подушечки для ног образовывали вершины равностороннего треугольника со сторонами 2,21 м (7 футов 3 дюйма), если смотреть сверху, причем длинные стороны основания образуют прямую линию с двумя соседними подушечками для ног. Инструменты были прикреплены внутри и наверху базы, приподнятую над поверхностью за счет выдвинутых опор.
Каждый посадочный модуль был заключен в аэрозольный кожух тепловой экран, предназначенный для замедления посадочного модуля во время фазы входа. заражение Марса земными организмами на каждом спускаемом аппарате после сборки и заключения внутри аэрооболочки, помещали в герметичный «биозащитный экран» и затем стерилизовали при температуре 111 ° C (232 ° F) в течение 40 часов. По тепловым причинам крышка биозащиты была сброшена после того, как разгонный блок Centaur вывел орбитальный аппарат и посадочный модуль Viking с орбиты Земли.
Каждый посадочный модуль прибыл на Марс, прикрепленный к орбитальному аппарату. Аппарат много раз облетал Марс, прежде чем посадочный модуль был выпущен и отделен от орбитального аппарата для спуска на поверхность. Спуск состоял из четырех отдельных этапов, начиная с выжигания с орбиты. Затем спускаемый аппарат испытал вход в атмосферу с пиковым нагревом, произошедшим через несколько секунд после начала нагрева трением с атмосферой Марса. На высоте около 6 километров (3,7 мили) и при движении со скоростью 900 километров в час (600 миль в час) парашют раскрылся, аэрооболочка была выпущена, и ноги посадочного модуля развернулись. На высоте около 1,5 км (5000 футов) спускаемый аппарат активировал свои три ретро-двигателя и был выпущен с парашюта. Затем спускаемый аппарат немедленно использовал ретроковые ракеты, чтобы замедлить и контролировать его спуск, с мягкой посадкой на поверхность Марса.
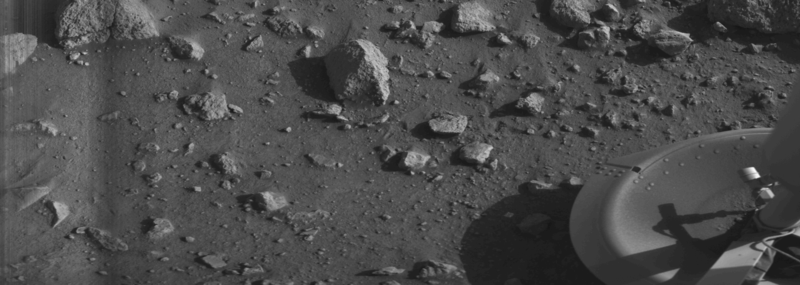 Первое "четкое" изображение, когда-либо передаваемое с поверхности Марса - показаны скалы возле спускаемого аппарата Викинг 1 (20 июля 1976 г.).
Первое "четкое" изображение, когда-либо передаваемое с поверхности Марса - показаны скалы возле спускаемого аппарата Викинг 1 (20 июля 1976 г.). Движущая сила для схода с орбиты обеспечивалась монотопливом гидразин (N2H4), через ракету с 12 соплами, расположенными в четыре группы по три, которые обеспечивали тягу 32 ньютона (7,2 фунта f), что соответствует изменению скорости на 180 м / с (590 футов / с). Эти сопла также действовали как управляющие подруливающие устройства для перемещения и вращения посадочного модуля.
Терминал спуск (после использования парашюта ) и посадка использовали три (по одному на каждой длинной стороне основания, разделенные 120 градусов) монотопливные гидразиновые двигатели. Двигатели имели 18 форсунок для рассеивания выхлопных газов и минимизации воздействия на землю, и имели дросселирование от 276 до 2667 ньютонов (от 62 до 600 фунтов f). Гидразин очищали, чтобы предотвратить заражение поверхности Марса земными микробами. При запуске спускаемый аппарат нес 85 кг (187 фунтов) топлива, содержащегося в двух сферических титановых баках, установленных на противоположных сторонах посадочного модуля под лобовыми стеклами РИТЭГа, что дает общую стартовую массу 657 кг (1448 фунтов).. Управление достигалось за счет использования инерциального эталонного блока , четырех гироскопов, радарного высотомера , терминала снижения и посадки радара, и управляющие двигатели.
Электроэнергия обеспечивалась двумя радиоизотопными термоэлектрическими генераторами (РТГ), содержащими плутоний-238, прикрепленными к противоположным сторонам посадочной базы и покрыты ветровыми стеклами. Каждый Viking RTG имел высоту 28 см (11 дюймов), диаметр 58 см (23 дюйма), массу 13,6 кг (30 фунтов) и обеспечивал непрерывную мощность 30 Вт при 4,4 вольт. Четыре мокрых элемента герметичных никель-кадмиевых 8 Ач (28800 кулонов ), 28-вольтовые аккумуляторные батареи также были на борту для работы с пиковой мощностью. нагрузки.
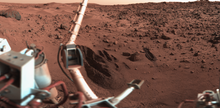
 Изображение с Марса, полученное посадочным модулем Viking 2
Изображение с Марса, полученное посадочным модулем Viking 2 Связь осуществлялась через 20-ваттный передатчик S-диапазона с использованием двух ламп бегущей волны. Двухосная управляемая параболическая антенна с высоким коэффициентом усиления была установлена на стреле около одного края базы посадочного модуля. Всенаправленная антенна S-диапазона с низким коэффициентом усиления также простирается от базы. Обе эти антенны обеспечивали прямую связь с Землей, позволяя «Викингу-1» продолжать работу еще долго после того, как оба орбитальных аппарата вышли из строя. Антенна UHF (381 МГц) обеспечивала одностороннюю ретрансляцию на орбитальный аппарат с использованием 30-ваттного ретранслятора. Хранение данных осуществлялось на магнитофоне емкостью 40 Мбит, а посадочный компьютер имел память на 6000- слов для командных инструкций.
Посадочный модуль имел инструменты для достижения основных научных целей миссии посадочного модуля: для изучения биологии, химического состава (органический и неорганический ), метеорология, сейсмология, магнитные свойства, внешний вид и физические свойства поверхности и атмосферы Марса. Две камеры с цилиндрическим сканированием на 360 градусов были установлены около одной длинной стороны основания. Из центра этой стороны выдвигается рычаг пробоотборника с коллекторной головкой, датчиком температуры и магнитом на конце. метеорологическая стрела, датчики температуры выдержки, направления ветра и скорости ветра выдвигались и поднимались вверх от вершины одной из опор посадочного модуля. Сейсмометр , магнит и камера испытательные цели и увеличительное зеркало зеркало устанавливаются напротив камер, рядом с антенной с большим усилением. Во внутреннем отсеке с контролируемой средой находились эксперимент биология и газовый хроматограф масс-спектрометр. Флуоресцентный спектрометр X-ray также был установлен внутри конструкции. Под корпусом посадочного модуля был прикреплен датчик давления . Полезная нагрузка для научных целей имела общую массу примерно 91 кг (201 фунт).
Посадочные аппараты «Викинг» провели биологические эксперименты, направленные на обнаружение жизни в марсианской почве (если она существовала) с экспериментами, разработанными тремя отдельные группы под руководством главного научного сотрудника Джеральда Соффена из НАСА. Один эксперимент дал положительный результат на обнаружение метаболизма (текущая жизнь), но, основываясь на результатах двух других экспериментов, которые не выявили никаких органических молекул в почве, большинство ученых пришли к выводу, что убеждены, что положительные результаты, вероятно, были вызваны небиологическими химическими реакциями из-за сильно окисляющих почвенных условий.
 Траншеи, вырытые пробоотборником почвы спускаемого аппарата Viking 1.
Траншеи, вырытые пробоотборником почвы спускаемого аппарата Viking 1. Хотя во время миссии НАСА заявило, что результаты спускаемого аппарата «Викинг» не продемонстрировали убедительных биосигнатур в почвах на двух местах посадки, результаты испытаний и их ограничения все еще находятся на стадии оценки. Достоверность положительных результатов «меченого высвобождения» (LR) полностью зависела от отсутствия окислителя в марсианской почве, но позже был обнаружен спускаемый аппарат Phoenix в виде перхлората. соли. Было высказано предположение, что органические соединения могли присутствовать в почве, проанализированной как Viking 1, так и Viking 2, но оставались незамеченными из-за присутствия перхлората, обнаруженного Phoenix в 2008 году. Исследователи обнаружили, что перхлорат разрушает органические вещества при нагревании и будет производить хлорметан и дихлорметан, идентичные соединения хлора, обнаруженные обоими посадочными модулями Viking, когда они проводили одинаковые испытания на Марсе.
Остается вопрос о микробной жизни на Марсе. нерешенные. Тем не менее, 12 апреля 2012 года международная группа ученых сообщила об исследованиях, основанных на математических предположениях с помощью анализа сложности экспериментов с маркированным выпуском миссии Viking 1976 года, которые могут указывать на обнаружение «сохранившейся микробной жизни на Марсе». Кроме того, в 2018 году были опубликованы новые результаты повторной проверки результатов газового хроматографа и масс-спектрометра (ГХМС).
Руководителем группы визуализации был Томас А. Матч, геолог из Университета Брауна в Провиденсе, Род-Айленд. В камере используется подвижное зеркало для освещения 12 фотодиодов. Каждый из 12 кремниевых диодов чувствителен к разным частотам света. Несколько диодов размещены для точной фокусировки на расстоянии от шести до 43 футов от посадочного модуля.
Камеры сканировали со скоростью пять строк вертикального сканирования в секунду, каждая из которых состоит из 512 пикселей. Панорамные изображения 300 градусов состояли из 9150 строк. Сканирование камер было достаточно медленным, так что в кадре бригады, сделанном во время разработки системы визуализации, несколько членов появлялись в кадре несколько раз, когда они двигались во время сканирования камерой.
На спускаемых аппаратах Viking использовался компьютер наведения, управления и последовательности (GCSC), состоящий из двух 24-битных компьютеров Honeywell HDC 402 с 18K памяти с гальванической проводкой, а на орбитальных аппаратах Viking использовался Подсистема командного компьютера (CCS) с использованием двух специально разработанных 18-разрядных последовательных процессоров.
Два орбитальных аппарата стоили 217 миллионов долларов США (на тот момент), что составляет около 1 миллиарда долларов в долларах 2019 года. Самой дорогой частью программы был блок обнаружения жизни спускаемого аппарата, который на тот момент стоил около 60 миллионов или 300 миллионов долларов в 2019 году. Разработка конструкции посадочного модуля "Викинг" обошлась в 357 миллионов долларов США. Это было за десятилетия до того, как НАСА применило "более быстрый, лучший, дешевый" подход, и Viking потребовалось внедрить беспрецедентные технологии под давлением страны, вызванным холодной войной и последствиями космической гонки, все в перспективе возможного открытия внеземной жизни в первый раз. Эксперименты должны были соответствовать специальной директиве 1971 года, которая предписывала, что ни один единственный отказ не должен останавливать повторение результатов более чем одного эксперимента - трудная и дорогостоящая задача для устройства, состоящего из более чем 40 000 деталей.
Стоимость системы камеры Viking 27,3 миллиона долларов США на разработку, или около 100 миллионов долларов в 2019 году. Когда разработка системы визуализации была завершена, было трудно найти кого-либо, кто мог бы разработать ее усовершенствованный дизайн. Позже менеджеров программы хвалили за то, что они отразили необходимость использовать более простую и менее совершенную систему визуализации, особенно когда появились обзоры. Программа действительно сэкономила деньги, отключив третий посадочный модуль и уменьшив количество экспериментов на посадочном модуле.
В целом НАСА утверждает, что на программу было потрачено 1 миллиард долларов в долларах 1970-х годов, что с поправкой на инфляцию до долларов 2019 года составляет около 5 миллиардов долларов США.
Корабли в конечном итоге вышли из строя, одно за другим:
| Судно | Дата прибытия | Дата закрытия | Срок службы | Причина отказ |
|---|---|---|---|---|
| орбитальный аппарат "Викинг 2" | 7 августа 1976 г. | 25 июля 1978 г. | 1 год, 11 месяцев, 18 дней | Выключение после утечка топлива в двигательной установке. |
| Посадочный модуль Viking 2 | 3 сентября 1976 г. | 11 апреля 1980 г. | 3 года, 7 месяцев, 8 дней | Выключение после зарядки аккумулятора неудача. |
| Орбитальный аппарат "Викинг-1" | 19 июня 1976 г. | 17 августа 1980 г. | 4 года, 1 месяц, 19 дней | Выключение после истощение топлива системы ориентации. |
| Посадочный модуль Viking 1 | 20 июля 1976 г. | 13 ноября 1982 г. | 6 лет, 3 месяца, 22 дня | Выключение из-за человека Ошибка во время обновления программного обеспечения привела к отключению антенны посадочного модуля, прекращению подачи питания и связи. |
Программа «Викинг» завершилась 21 мая 1983 года. Чтобы предотвратить неминуемое столкновение с Марсом, орбитальный аппарат «Викинг-1» был поднят 7 августа 1980 года, прежде чем он был закрыт 10 дней спустя. Воздействие и возможное загрязнение поверхности планеты возможно с 2019 года.
Посадочный модуль «Викинг-1» в декабре 2006 года был обнаружен марсианским разведывательным орбитальным аппаратом примерно в 6 километрах от запланированного места посадки.

| Викискладе есть средства массовой информации, связанные с миссией «Викинг». |