
Войти
Дельта-сигма (ΔΣ; или сигма-дельта, ΣΔ) модуляция - это метод кодирования аналоговых сигналов в цифровых сигналов, как в аналого-цифровом преобразователе (АЦП). Он также используется для преобразования низкочастотных цифровых сигналов с большим числом битов в цифровые сигналы с более низким числом битов и более высокой частотой как часть процесса преобразования цифровых сигналов в аналоговые как часть цифро-аналогового преобразования. преобразователь (ЦАП).
В обычном АЦП аналоговый сигнал дискретизируется с частотой дискретизации и затем квантуется в многоуровневом квантователе в цифровой сигнал. Этот процесс вносит шум ошибки квантования. Первый шаг в дельта-сигма-модуляции - это дельта-модуляция. В дельта-модуляции кодируется изменение сигнала (его дельта), а не абсолютное значение. Результатом является поток импульсов, а не поток чисел, как в случае с импульсной кодовой модуляцией (ИКМ). При дельта-сигма-модуляции точность модуляции повышается путем пропускания цифрового выхода через 1-битный ЦАП и добавления (сигма) результирующего аналогового сигнала к входному сигналу (сигнал до дельта-модуляции), тем самым уменьшая ошибку, вносимую дельта-модуляция.
И АЦП, и ЦАП могут использовать дельта-сигма модуляцию. Дельта-сигма АЦП сначала кодирует аналоговый сигнал, используя высокочастотную дельта-сигма модуляцию, а затем применяет цифровой фильтр для формирования цифрового выходного сигнала с более высоким разрешением, но с более низкой частотой дискретизации. Дельта-сигма ЦАП кодирует цифровой входной сигнал высокого разрешения в сигнал с более низким разрешением, но с более высокой частотой дискретизации, который преобразуется в напряжения, а затем сглаживается аналоговым фильтром. В обоих случаях временное использование сигнала с более низким разрешением упрощает конструкцию схемы и повышает эффективность.
В первую очередь из-за своей экономической эффективности и меньшей сложности схемы, этот метод нашел все более широкое применение в современных электронных компонентах, таких как ЦАП, АЦП, синтезаторы частоты, импульсные источники питания. и контроллеры двигателей. Грубо-квантованный выход дельта-сигма-модулятора иногда используется непосредственно при обработке сигналов или как представление для хранения сигнала. Например, Super Audio CD (SACD) хранит выходной сигнал дельта-сигма-модулятора непосредственно на диске.
Дельта-сигма Модуляция преобразует аналоговый сигнал напряжения в частоту импульсов или плотность импульсов, которую можно понимать как модуляция плотности импульсов (PDM). Последовательность положительных и отрицательных импульсов, представляющих биты с известной фиксированной скоростью, очень легко сгенерировать, передать и точно восстановить в приемнике, при условии только того, что можно восстановить синхронизацию и знак импульсов. Учитывая такую последовательность импульсов от дельта-сигма модулятора, исходная форма волны может быть восстановлена с достаточной точностью. Напротив, без преобразования в поток импульсов, а просто передачи аналогового сигнала напрямую, весь шум в системе будет добавлен к аналоговому сигналу, что снизит его качество. Использование PDM в качестве представления сигнала является альтернативой импульсно-кодовой модуляции (PCM), дискретизации и квантованию в многобитовый код со скоростью Найквиста.
Дельта-сигма или другой модулятор плотности импульсов или частотно-импульсный модулятор генерирует поток импульсов, в котором частота f импульсов в потоке пропорциональна аналоговому входному напряжению, v, так что f = k · v, где k - константа для конкретной реализации. Контур обратной связи отслеживает интеграл от v, и когда этот интеграл увеличивается на Δ, на что указывает интегральная форма сигнала, пересекающая пороговое значение, T, она вычитает Δ из интеграла от v, так что пилообразные формы комбинированной формы сигнала находятся между T и T - Δ.. На каждом шаге к потоку импульсов добавляется импульс.
Счетчик суммирует количество импульсов, которые происходят в заранее определенный период, 




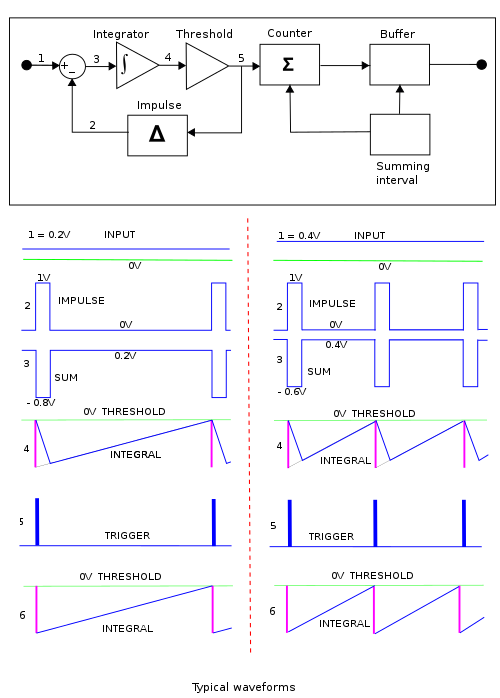 Рисунок 1: Блок-схема и формы сигналов для несинхронизированного преобразователя напряжения в частоту (левая часть) с подсчетом частоты (правая часть) составляют законченный аналого-цифровой преобразователь. Ограничение импульсов, возникающих через регулярные интервалы тактовых импульсов, преобразовало бы эту систему в сигма-дельта АЦП.
Рисунок 1: Блок-схема и формы сигналов для несинхронизированного преобразователя напряжения в частоту (левая часть) с подсчетом частоты (правая часть) составляют законченный аналого-цифровой преобразователь. Ограничение импульсов, возникающих через регулярные интервалы тактовых импульсов, преобразовало бы эту систему в сигма-дельта АЦП.  Рисунок 1a: Эффект тактирующих импульсов
Рисунок 1a: Эффект тактирующих импульсов В целях введения рисунок 1 иллюстрирует концепцию отношения напряжения к напряжению. преобразование частоты в несинхронизированной форме, напоминающее дельта-сигма модуляцию, и называется асинхронной модуляцией, асинхронной дельта-сигма модуляцией или автономными модуляторами.
Ниже показаны формы сигналов в точках, обозначенных цифрами от 1 до 5 для входа 0,2 В в левом столбце и 0,4 В в правом столбце. Поток дельта-импульсов, генерируемых при каждом пересечении порога, показан в (2), а разница между (1) и (2) показана в (3). Эта разница интегрирована для получения формы сигнала (4). Детектор порога генерирует импульс (5), который начинается, когда форма сигнала (4) пересекает порог, и сохраняется до тех пор, пока форма сигнала (4) не упадет ниже порога. Порог (5) запускает генератор импульсов, чтобы произвести импульс фиксированной силы.
Интеграл (4) в правом столбце пересекает порог вдвое быстрее, чем в левом столбце. Таким образом частота импульсов увеличивается вдвое. Следовательно, счетчик увеличивается в два раза быстрее, чем справа; это удвоение частоты следования импульсов соответствует удвоению входного напряжения.
Построению форм сигналов, показанных в (4), помогают концепции, связанные с дельта-функцией Дирака в том смысле, что, по определению, все импульсы одинаковой силы производят одинаковый шаг при объединении. Затем (4) строится с использованием промежуточного шага (6), гипотетическая форма волны не в схеме, а в которой каждый интегрированный импульс идеальной дельта-функции интегрирован в шаг. Эффект конечной длительности фактического импульса построен в (4) путем проведения линии от основания импульсной ступени при нулевом напряжении до пересечения с линией затухания из (6) при полной длительности импульса.
В схеме за пределами цикла интервал суммирования является заранее определенным фиксированным временем, и по его истечении счет сохраняется, а буфер и счетчик сбрасываются. Затем буфер представляет последовательность цифровых значений, соответствующих квантованиям уровней аналогового сигнала в течение интервалов суммирования. Использование интервала суммирования - это способ (не обязательно идеальный способ) квантовать асинхронный поток импульсов в код; он будет иметь меньше ошибок квантования, если начало интервала синхронизировано с импульсом.
Преобразователи дельта-сигма дополнительно ограничивают работу генератора импульсов, так что начало импульса задерживается до следующего появления соответствующей границы тактового импульса. Эффект этой задержки показан на рисунке 1а для последовательности импульсов, которые возникают с номинальными интервалами 2,5 такта.
 Рисунок 1b: принципиальная схема
Рисунок 1b: принципиальная схема  Рисунок 1c: Формы сигналов АЦП
Рисунок 1c: Формы сигналов АЦП Принципиальная схема реализации дельта-сигма модулятора показана на рисунке 1b, а соответствующие формы сигналов - на рисунке 1c. Формы сигналов, показанные на рисунке 1c, необычайно сложны, поскольку они предназначены для иллюстрации поведения контура в экстремальных условиях: V в насыщается при полном масштабе 1,0 В и насыщается при нуле. Также указано промежуточное состояние, V в при 0,4 В, где оно очень похоже на операцию, показанную на рисунке 1.
С верхней части рисунка 1c, формы сигналов, помечены, как они есть на принципиальной схеме:
Изучение рисунка 1c (g) показывает, что в потоке счетчика есть нулевые импульсы, когда входное напряжение равно нулю. Это условие может привести к тому, что высокочастотные компоненты сложного сигнала не будут разрешены. Этот эффект известен как интермодуляционные искажения (IMD). Одна из ловушек применения линейного анализа к нелинейной системе заключается в том, что IMD, поскольку это может быть следствием нелинейности, не присутствует в анализе. Чисто в иллюстративных целях способ смягчить это - добавить постоянное смещение 0,5 В к входному напряжению, чтобы оно теперь могло колебаться на +/- 0,5 В относительно смещения. Теперь это имеет нулевые импульсы в счетном потоке, когда входной сигнал составляет -0,5 В. Затем мы должны ограничить размах входного сигнала до +/- 0,4 В, скажем, так, чтобы минимальная частота счетного потока была больше нуля. Мы можем выбрать тактовую частоту так, чтобы минимальная частота счетного потока при -0,4 В была намного больше, чем частота Найквиста, так что разрешается даже самый высокий компонент входной частоты. Мы можем увеличить тактовую частоту еще выше до тех пор, пока фильтр нижних частот в достаточной степени не устранит пульсации, полностью восстанавливая входной сигнал. В этом иллюстративном обсуждении отфильтрованный сигнал также восстановит смещение, которое может быть устранено аналоговым сумматором, при этом сохраняя постоянную составляющую входного сигнала.
Согласно Вули, основополагающая статья, объединяющая обратную связь с передискретизацией для достижения дельта-модуляции, была написана Ф. де Ягером в 1952 году.
Была разработана конфигурация дельта-сигма. Автор: Inose et al. в 1962 году для решения проблем точной передачи аналоговых сигналов. В этом приложении был передан поток импульсов, а исходный аналоговый сигнал восстановлен с помощью фильтра нижних частот после преобразования полученных импульсов. Этот фильтр нижних частот выполнял функцию суммирования, связанную с Σ. Они представили высоко математический подход к ошибкам передачи, применимый к потоку импульсов, но эти ошибки теряются в процессе накопления, связанном с Σ.
Для аналогового к применению цифрового преобразования каждому импульс в потоке счета является образцом среднего значения входного напряжения равного опорного напряжения разделить интервал между импульсами, Ts. Это потому, что это интегрирование формы входного сигнала по интервалу ts. Частотная область анализ сложной формы волны в этом интервале ts будет представлять ее как сумму константы, основной гармоники и гармоник, каждая из которых имеет точное целое число периодов в течение ts. Интеграл синусоидальной волны за один или несколько полных циклов равен нулю. Следовательно, интеграл входящей формы волны за интервал ts сводится к среднему значению за интервал. Подсчет N, накопленный в течение интервала суммирования, представляет N выборок среднего, а N, разделенное на счет, определяющий интервал суммирования, таким образом, является средним из средних и поэтому подвержен небольшому отклонению.
Как правило, ЦАП преобразует цифровое число N, представляющее некоторое аналоговое значение, в это аналоговое значение напряжения. Для преобразования цифровое число сначала загружается в счетчик. Затем счетчик ведет обратный отсчет до нуля с последовательностью импульсов, равным N. Каждому импульсу строки дается известный интеграл δ. Затем струна интегрируется, чтобы получить N.δ, сумму импульсов. Это необходимое аналоговое напряжение.
В некоторых приложениях, где аналоговый сигнал представлен серией цифровых чисел, требующих преобразования в частотно-модулированный поток, может быть достаточно взять поток импульсов (двух или трехуровневый), полученный в результате преобразования ЦАП. каждого числа N по очереди и применить этот поток через фильтр нижних частот непосредственно к выходу. Выходной сигнал до фильтрации будет грубо модулированным по частоте потоком с пакетами импульсов, пропорциональными по длине и количеству аналогу N, разделенных пустыми интервалами между пакетами.
Чтобы удалить пустые интервалы и улучшить шумовые характеристики, полное преобразование в аналоговое напряжение каждого последующего N с помощью ЦАП, описанного выше, может быть проведено в схеме выборки и удержания, а затем передано к дельта-сигма-преобразователю для создания потока непрерывных пакетов, частота каждого из которых пропорциональна его генерации N.
Концептуально простейшая структура децимации - это счетчик, который сбрасывается на ноль в начале каждого периода интегрирования, затем считывается в конце периода интегрирования.
Структура многокаскадного формирования шума (MASH) имеет свойство формирования шума и обычно используется в цифровых звуковых синтезаторах и синтезаторах частот с дробным N. Он состоит из двух или более каскадных переполненных аккумуляторов, каждый из которых эквивалентен сигма-дельта-модуляторам первого порядка. Выходы переноса объединяются посредством суммирования и задержек для получения двоичного выхода, ширина которого зависит от количества каскадов (порядка) MASH. Помимо функции формирования шума, у него есть еще два привлекательных свойства:
Очень популярной децимационной структурой является фильтр sinc. Для модуляторов второго порядка фильтр sinc3 близок к оптимальному.
Давайте, например, имеем прореживающий фильтр 8: 1 и 1-битовый поток битов; если у нас есть входной поток типа 10010110, подсчитав количество единиц, мы получим 4. Тогда результат прореживания будет 4/8 = 0,5. Затем мы можем представить его 3-битным числом 100 (двоичным), что означает половину максимально возможного числа. Другими словами,
После применения прореживания и если передаются n-битовые коды, сигнал становится импульсной кодовой модуляцией. Прореживание сильно связано с дельта-сигма-модуляцией, но необходимо проводить различие.
Есть много видов АЦП, которые используют эту дельта-сигма структуру. Приведенный выше анализ фокусируется на простейшем двухуровневом сигма-дельта АЦП 1-го порядка с равномерным прореживанием. Многие АЦП используют сигма-дельта-структуру sinc3 второго порядка с 5 уровнями. Во многом из того, что далее следует, используются загадочные сокращения с использованием символов, представляющих операционные функции с анализом, представленным в терминах преобразований Лапласа и т. Д. Это lingua franca индустрии передачи данных, и он не распространяется на широкую публику. Если требуется более полная документация по конкретному методу, не ищите ничего, кроме патентов. (Патентные эксперты обычно требуют полного раскрытия информации.) Прекрасная история - это «Эволюция аналого-цифровых преобразователей с передискретизацией» Брюса А. Вули, в которой есть много ссылок на соответствующие патенты.
 Рисунок 4: Блок-схема ΔΣ-модулятора второго порядка
Рисунок 4: Блок-схема ΔΣ-модулятора второго порядка Количество интеграторов и, следовательно, количество контуров обратной связи указывает порядок модулятор ΔΣ; ΔΣ-модулятор второго порядка показан на рисунке 4. Модуляторы первого порядка безусловно стабильны, но для модуляторов более высокого порядка необходимо проводить анализ устойчивости.
Модулятор также можно классифицировать по количеству битов, которые он имеет на выходе, что строго зависит от выхода квантователя. Квантователь может быть реализован с помощью N-уровневого компаратора, таким образом, модулятор имеет log 2 N-битный выход. У простого компаратора есть 2 уровня, как и у 1-битного квантователя; трехуровневый квантователь называется «1,5-битным квантователем»; 4-уровневый квантователь - это 2-битный квантователь; 5-уровневый квантователь называется «2,5-битным» квантователем.
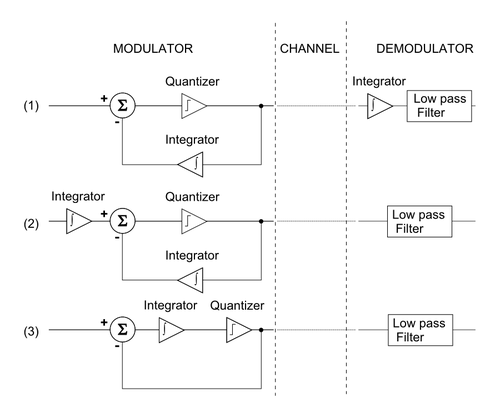 Рисунок 2: Получение дельта-сигма из дельта-модуляции
Рисунок 2: Получение дельта-сигма из дельта-модуляции  Рисунок 3: Пример дельта-сигма модуляция 100 отсчетов одного периода синусоидальной волны. 1-битные выборки (например, выход компаратора), наложенные синусоидальной волной. Высокий логический уровень (например, V CC) выборок представлен синим, а низкий логический уровень (например, -V CC) представлен белым.
Рисунок 3: Пример дельта-сигма модуляция 100 отсчетов одного периода синусоидальной волны. 1-битные выборки (например, выход компаратора), наложенные синусоидальной волной. Высокий логический уровень (например, V CC) выборок представлен синим, а низкий логический уровень (например, -V CC) представлен белым. Дельта-сигма модуляция вдохновленные дельта-модуляцией, как показано на рисунке 2. Если квантование было однородным (например, если оно было линейным ), следующее было бы достаточным выводом эквивалентности:
 , позволяет перемещать интегратор, который восстанавливает аналоговый сигнал в секции демодулятора перед дельта-модулятором.
, позволяет перемещать интегратор, который восстанавливает аналоговый сигнал в секции демодулятора перед дельта-модулятором.Поскольку квантователь неоднороден, дельта-сигма вызвана дельта-модуляцией, но два работают по-разному.
Из первой блок-схемы на рисунке 2 интегратор в тракте обратной связи может быть удален, если обратная связь берется непосредственно со входа фильтра нижних частот. Следовательно, для дельта-модуляции входного сигнала u фильтр нижних частот видит сигнал

Однако сигма-дельта модуляция тот же входной сигнал помещается в фильтр нижних частот

В другом слова, дельта-сигма и дельта-модуляция меняют местами интегратор и квантователь. Чистый эффект представляет собой более простую реализацию, которая имеет дополнительное преимущество, заключающееся в формировании шума квантования вдали от сигналов, представляющих интерес (т. Е. Представляющие интерес сигналы фильтруются по нижним частотам, а шум квантования фильтруется по верхним частотам). Этот эффект становится более драматичным с увеличением передискретизации, что позволяет в некоторой степени программировать шум квантования. С другой стороны, дельта-модуляция одинаково формирует и шум, и сигнал.
Кроме того, квантователь (например, компаратор ), используемый в дельта-модуляции, имеет небольшой выходной сигнал, представляющий небольшой шаг вверх и вниз квантованного приближения входа, в то время как квантователь используется в дельта-сигма должен принимать значения за пределами диапазона входного сигнала, как показано на рисунке 3.
В общем, дельта-сигма имеет некоторые преимущества по сравнению с дельта-модуляцией:
Когда сигнал квантован, Результирующий сигнал имеет примерно статистику второго порядка сигнала с добавленным независимым белым шумом. Предполагая, что значение сигнала находится в диапазоне одного шага квантованного значения с равным распределением, среднеквадратичное значение этого шума квантования равно

На самом деле шум квантования, конечно,, не зависит от сигнала, и эта зависимость приводит к предельным циклам и является источником холостых тонов и структурного шума в сигма-дельта преобразователях.
Шум квантования можно уменьшить, увеличив коэффициент передискретизации (OSR), определенный как

где 

RMS напряжение шума в пределах интересующего диапазона (

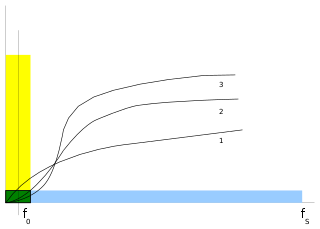 Рис. 5: Кривые формирования шума и спектр шума в модуляторах ΔΣ первого, второго и третьего порядка. Полоса, представляющая интерес для преобразования, обозначена зеленым.
Рис. 5: Кривые формирования шума и спектр шума в модуляторах ΔΣ первого, второго и третьего порядка. Полоса, представляющая интерес для преобразования, обозначена зеленым. ΔΣ-модуляция - это метод передискретизации для уменьшения шума в интересующей полосе (зеленый на рисунке 5), который позволяет избежать использования высоких частот. -точные аналоговые схемы для сглаживающего фильтра. Общий шум квантования одинаков как в преобразователе Найквиста (желтый), так и в преобразователе передискретизации (синий), но он распределен по другому спектру. В преобразователях ΔΣ шум дополнительно снижается на низких частотах, что является полосой, в которой находится интересующий сигнал, и увеличивается на более высоких частотах, где он может быть отфильтрован. Этот метод известен как формирование шума.
Для дельта-сигма-модулятора первого порядка шум формируется фильтром с передаточной функцией H n (z) = [1 - z]. Предполагая, что частота дискретизации f s велика по сравнению с частотой сигнала, представляющего интерес, f 0, шум квантования в полосе частот полезного сигнала может быть аппроксимирован как:
 .
.Аналогично для дельта-сигма-модулятора второго порядка шум формируется фильтром с передаточной функцией H n (z) = [1 - z]. Шум внутриполосного квантования можно приблизительно рассчитать следующим образом:
 .
.В целом, для модулятора ΔΣ N-го порядка дисперсия шума внутриполосного квантования равна:
 .
.Когда частота дискретизации удваивается, отношение сигнал-шум квантования улучшается на 6N + 3 дБ для модулятора ΔΣ N-порядка. Чем выше коэффициент передискретизации, тем выше отношение сигнал / шум и выше разрешение в битах.
Другим ключевым аспектом передискретизации является компромисс между скоростью и разрешением. Децимационный фильтр, установленный после модулятора, не только фильтрует весь дискретизированный сигнал в интересующей полосе частот (устраняя шум на более высоких частотах), но также снижает частоту сигнала, увеличивая его разрешение. Это достигается своего рода усреднением битового потока с более высокой скоростью передачи данных.
Впервые этот метод был представлен в начале 1960-х профессором Ясухико Ясуда, когда он был студентом Токийского университета. Название дельта-сигма происходит непосредственно от присутствия дельта-модулятора и интегратора, как впервые было введено Inose et al. в своей патентной заявке. То есть название происходит от интегрирования или суммирования разностей, которые в математике представляют собой операции, обычно связанные с греческими буквами сигма и дельта соответственно. Часто используются оба названия: сигма-дельта и дельта-сигма.