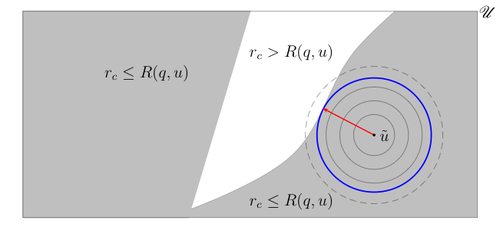
Радиус устойчивости объекта (системы, функции, матрицы, параметра) в заданной номинальной точке равен радиусу наибольшего мяч с центром в номинальной точке, все элементы которого удовлетворяют заранее заданным условиям устойчивости. Картина этого интуитивного понятия такова:

где  обозначает номинальную точку,
обозначает номинальную точку,  обозначает пространство всех возможных значений объекта
обозначает пространство всех возможных значений объекта  и заштрихованной области
и заштрихованной области  представляет набор точек, удовлетворяющих условиям устойчивости. Радиус синего круга, показанного красным, - это радиус устойчивости.
представляет набор точек, удовлетворяющих условиям устойчивости. Радиус синего круга, показанного красным, - это радиус устойчивости.
Содержание
- 1 Абстрактное определение
- 2 История
- 3 Связь с моделью максимина Уолда
- 4 Теория принятия решений по информационным пробелам
- 5 Альтернативное определение
- 6 Радиус устойчивости функций
- 6.1 Определение
- 6.2 Приложения
- 6.3 Свойства
- 6.4 Примеры
- 7 См. Также
- 8 Ссылки
Абстрактное определение
Формальное определение этого понятия варьируется в зависимости от Область применения. Очень полезно следующее абстрактное определение

где  обозначает закрытый шар радиуса
обозначает закрытый шар радиуса  в с центром в .
в с центром в .
История
Похоже, концепция была изобретена в начале 1960-х. В 80-е годы он стал популярным в теории управления и оптимизации. Он широко используется в качестве модели локальной устойчивости к небольшим возмущениям заданной номинальной стоимости интересующего объекта.
Связь с моделью максимина Вальда
Было показано, что модель радиуса устойчивости является примером модели максимина Вальда. То есть

где

Большой штраф ( ) - это устройство, заставляющее игрока
) - это устройство, заставляющее игрока  не нарушать номинальное значение за пределами радиуса устойчивости системы. Это показатель того, что модель устойчивости является моделью локальной стабильности / устойчивости, а не глобальной.
не нарушать номинальное значение за пределами радиуса устойчивости системы. Это показатель того, что модель устойчивости является моделью локальной стабильности / устойчивости, а не глобальной.
Теория принятия решений по информационным промежуткам
Теория принятия решений по информационным промежуткам - это недавняя теория не вероятностных решений. Утверждается, что он радикально отличается от всех современных теорий принятия решений в условиях неопределенности. Но было показано, что его модель устойчивости, а именно

на самом деле является моделью радиуса устойчивости, характеризующейся простым требованием устойчивости вида  где
где  обозначает рассматриваемое решение,
обозначает рассматриваемое решение,  обозначает интересующий параметр,
обозначает интересующий параметр,  обозначает оценку истинного значения и
обозначает оценку истинного значения и  обозначает шар радиуса
обозначает шар радиуса  с центром в .
с центром в .
Поскольку модели радиуса устойчивости предназначены для работы с небольшими отклонениями от номинального значения параметр, я Модель устойчивости nfo-gap измеряет локальную устойчивость решений в окрестности оценки .
Сниедович утверждает, что по этой причине теория не подходит для рассмотрения серьезная неопределенность, характеризующаяся плохой оценкой и обширным пространством неопределенности.
Альтернативное определение
Бывают случаи, когда удобнее определять радиус устойчивости несколько иначе. Например, во многих приложениях в теории управления радиус устойчивости определяется как величина наименьшего дестабилизирующего возмущения номинального значения интересующего параметра. Картинка такая:

Формально,

где  обозначает расстояние
обозначает расстояние  от .
от .
Радиус устойчивости функций
Радиус устойчивости непрерывной функции f (в функциональном пространстве F) с по отношению к открытой области устойчивости D - это расстояние между f и набором нестабильных функций (относительно D). Мы говорим, что функция стабильна относительно D, если ее спектр находится в D. Здесь понятие спектра определяется в каждом конкретном случае, как объясняется ниже.
Определение
Формально, если мы обозначим множество стабильных функций через S (D) и радиус устойчивости через r (f, D), то:

где C - подмножество F.
Обратите внимание, что если f уже нестабильно (относительно D), то r (f, D) = 0 (если C содержит ноль).
Приложения
Понятие радиуса устойчивости обычно применяется к специальным функциям как полиномы (тогда спектр является корнями) и матрицы (спектр - это собственные значения ). Случай, когда C является правильным подмножеством F, позволяет нам рассматривать структурированные возмущения (например, для матрицы нам могут потребоваться возмущения только в последней строке). Это интересная мера устойчивости, например, в теории управления.
Свойства
Пусть f будет (комплексным ) многочленом степени n, C = F будет множеством многочленов степени меньше (или равной) n (которые мы идентифицируем здесь с набором  коэффициентов). В качестве D возьмем открытый единичный круг, что означает, что мы ищем расстояние между многочленом и набором стабильных многочленов Шура . Тогда:
коэффициентов). В качестве D возьмем открытый единичный круг, что означает, что мы ищем расстояние между многочленом и набором стабильных многочленов Шура . Тогда:

где q содержит каждый базисный вектор (например,  , когда q - обычное степенное основание). Этот результат означает, что радиус устойчивости ограничен минимальным значением, которого f достигает на единичной окружности.
, когда q - обычное степенное основание). Этот результат означает, что радиус устойчивости ограничен минимальным значением, которого f достигает на единичной окружности.
Примеры
- Многочлен
 (нули которого являются корнями 8-й степени из 0,9) имеет радиус устойчивости 1/80, если q - степенной базис, а норма - бесконечная норма. Таким образом, должен существовать многочлен g с (бесконечной) нормой 1/90 такой, что f + g имеет (по крайней мере) корень на единичной окружности. Такой ag имеет вид, например,
(нули которого являются корнями 8-й степени из 0,9) имеет радиус устойчивости 1/80, если q - степенной базис, а норма - бесконечная норма. Таким образом, должен существовать многочлен g с (бесконечной) нормой 1/90 такой, что f + g имеет (по крайней мере) корень на единичной окружности. Такой ag имеет вид, например,  . В самом деле, (f + g) (1) = 0 и 1 находится на единичной окружности, что означает, что f + g нестабильно.
. В самом деле, (f + g) (1) = 0 и 1 находится на единичной окружности, что означает, что f + g нестабильно.
См. Также
Ссылки
- ^Злобец С. (2009). Недифференцируемая оптимизация: параметрическое программирование. Стр. 2607-2615, в Encyclopedia of Optimization, Floudas C.A, Pardalos, P.M. редакторы, Springer.
- ^ Сниедович, М. (2010). Взгляд с высоты на теорию принятия решений по информационным пробелам. Журнал «Финансирование рисков», 11 (3), 268-283.
- ^Уилф, Х.С. (1960). Максимально устойчивое численное интегрирование. Журнал Общества промышленной и прикладной математики, 8 (3), 537-540.
- ^Милн, У.Э., и Рейнольдс, Р.Р. (1962). Методы пятого порядка численного решения обыкновенных дифференциальных уравнений. Журнал АКМ, 9 (1), 64-70.
- ^Хиндрихсен, Д., Притчард, А.Дж. (1986). Радиусы устойчивости линейных систем, Системы и письма управления, 7, 1-10.
- ^Злобец С. (1988). Характеристика оптимальности в моделях математического программирования. Acta Applicandae Mathematicae, 12, 113–180.
- ^Пэйс А.Д.Б. и Вирт, Ф. (1998). Анализ локальной робастности устойчивости течений. Математика управления, сигналов и систем, 11, 289-302.



