
Моделирование крупных вихрей в поле скорости турбулентного газа.
Моделирование крупных вихрей (LES) представляет собой математическую модель для турбулентности используется в вычислительной гидродинамике. Первоначально он был предложен в 1963 году Джозефом Смагоринским для моделирования атмосферных воздушных течений и впервые исследован Дирдорфом (1970). LES в настоящее время применяется в самых разных инженерных приложениях, включая горение, акустику и моделирование атмосферного пограничного слоя.
Моделирование турбулентных потоков путем численного решения уравнений Навье – Стокса требует разрешения очень широкого диапазона масштабов времени и длины, каждый из которых влияет на поле потока. Такое разрешение может быть достигнуто с помощью прямого численного моделирования (DNS), но DNS требует больших вычислительных ресурсов, а его стоимость запрещает моделирование практических инженерных систем со сложной геометрией или конфигурациями потоков, таких как турбулентные струи, насосы, транспортные средства., и шасси.
Основная идея, лежащая в основе LES, состоит в том, чтобы уменьшить вычислительные затраты путем игнорирования наименьших масштабов длины, которые являются наиболее затратными в вычислительном отношении для разрешения, посредством низкочастотной фильтрации Navier –Уравнения Стокса. Такая фильтрация нижних частот, которую можно рассматривать как усреднение по времени и пространству, эффективно удаляет мелкомасштабную информацию из численного решения. Однако эта информация не имеет значения, и ее влияние на поле потока необходимо моделировать, что является активной областью исследования проблем, в которых мелкомасштабные потоки могут играть важную роль, таких как пристенные потоки, реагирующие потоки. и многофазные потоки.
Содержание
- 1 Определение и свойства фильтра
- 2 Отфильтрованные управляющие уравнения
- 2.1 Несжимаемый поток
- 2.2 Управляющие уравнения сжимаемости
- 2.3 Фильтрованная кинетика уравнение энергии
- 3 Численные методы для LES
- 4 Граничные условия моделирования больших вихрей
- 5 Моделирование неразрешенных масштабов
- 5.1 Подсеточные масштабные модели
- 5.1.1 Функциональные ( модели вихревой вязкости)
- 5.1.1.1 Модель Смагоринского – Лилли
- 5.1.1.2 Динамическая модель Германо
- 5.1.2 Структурные модели
- 6 См. также
- 7 Дополнительная литература
- 8 Ссылки
Определение и свойства фильтра
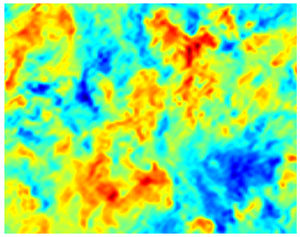
Поле скорости, созданное
прямым численным моделированием (DNS) однородного распада g турбулентность. Размер домена:

.

То же поле скорости DNS, отфильтрованное с использованием блочного фильтра и

.

То же самое поле скорости DNS, отфильтрованное с использованием прямоугольного фильтра и

.
An LES-фильтр можно применить к пространственному и временному полю  и выполнить операция пространственной фильтрации, операция временной фильтрации или и то, и другое. Отфильтрованное поле, обозначенное чертой, определяется как:
и выполнить операция пространственной фильтрации, операция временной фильтрации или и то, и другое. Отфильтрованное поле, обозначенное чертой, определяется как:

где  - ядро свертки фильтра. Это также можно записать как:
- ядро свертки фильтра. Это также можно записать как:

Ядро фильтра имеет связанный масштаб длины отсечки  и шкала времени отсечки
и шкала времени отсечки  . Масштаб меньшего размера исключается из
. Масштаб меньшего размера исключается из  . Используя приведенное выше определение фильтра, любое поле
. Используя приведенное выше определение фильтра, любое поле  может быть разделено на отфильтрованную и частично отфильтрованную (обозначенную штрихом) части, как
может быть разделено на отфильтрованную и частично отфильтрованную (обозначенную штрихом) части, как

Важно отметить, что операция фильтрации имитации больших вихрей не удовлетворяет свойствам оператора Рейнольдса.
Отфильтрованные управляющие уравнения
Управляющие уравнения LES получаются путем фильтрации уравнений в частных производных, управляющих полем потока  . Существуют различия между управляющими уравнениями LES для несжимаемой и сжимаемой LES, которые приводят к определению новой операции фильтрации.
. Существуют различия между управляющими уравнениями LES для несжимаемой и сжимаемой LES, которые приводят к определению новой операции фильтрации.
Несжимаемый поток
Для несжимаемого потока уравнение неразрывности и уравнения Навье – Стокса фильтруются, что дает отфильтрованное уравнение неразрывности несжимаемой жидкости,

и отфильтрованные уравнения Навье – Стокса,

где  - это фильтрованное поле давления, а
- это фильтрованное поле давления, а  - тензор скорости деформации. нелинейный член отфильтрованной адвекции
- тензор скорости деформации. нелинейный член отфильтрованной адвекции  является основной причиной трудностей при моделировании LES. Это требует знания нефильтрованного поля скоростей, которое неизвестно, поэтому его необходимо моделировать. Последующий анализ иллюстрирует трудности, вызванные нелинейностью, а именно тем, что она вызывает взаимодействие между большим и малым масштабами, предотвращая разделение масштабов.
является основной причиной трудностей при моделировании LES. Это требует знания нефильтрованного поля скоростей, которое неизвестно, поэтому его необходимо моделировать. Последующий анализ иллюстрирует трудности, вызванные нелинейностью, а именно тем, что она вызывает взаимодействие между большим и малым масштабами, предотвращая разделение масштабов.
Фильтрованный член адвекции можно разделить, следуя Леонарду (1974), следующим образом:

где  - тензор остаточных напряжений, так что отфильтрованные уравнения Навье-Стокса становятся
- тензор остаточных напряжений, так что отфильтрованные уравнения Навье-Стокса становятся

с тензором остаточных напряжений группировка всех незакрытых условий. Леонард разложил этот тензор напряжений как  и предоставил физические интерпретации для каждого термина.
и предоставил физические интерпретации для каждого термина.  , тензор Леонарда, представляет взаимодействия между большими масштабами,
, тензор Леонарда, представляет взаимодействия между большими масштабами,  , термин, подобный напряжению Рейнольдса, представляет взаимодействия между шкалами подфильтров (SFS), а
, термин, подобный напряжению Рейнольдса, представляет взаимодействия между шкалами подфильтров (SFS), а  , тензор Кларка, представляет межмасштабные взаимодействия между крупная и мелкая чешуя. Моделирование незакрытого члена - это задача моделей SFS (также называемых моделями подсеточного масштаба или SGS).. Это усложняется тем фактом, что тензор напряжения шкалы субфильтра должен учитывать взаимодействия между всеми шкалами, включая отфильтрованные чешуя с нефильтрованной чешуей.
, тензор Кларка, представляет межмасштабные взаимодействия между крупная и мелкая чешуя. Моделирование незакрытого члена - это задача моделей SFS (также называемых моделями подсеточного масштаба или SGS).. Это усложняется тем фактом, что тензор напряжения шкалы субфильтра должен учитывать взаимодействия между всеми шкалами, включая отфильтрованные чешуя с нефильтрованной чешуей.
Отфильтрованное управляющее уравнение для пассивного скаляра , например фракция смеси или температура, можно записать как

где  - диффузный поток и
- диффузный поток и  - поток субфильтра для скаляра . Отфильтрованный диффузионный поток
- поток субфильтра для скаляра . Отфильтрованный диффузионный поток  является незакрытым, если для него не принята конкретная форма (например, модель градиентной диффузии
является незакрытым, если для него не принята конкретная форма (например, модель градиентной диффузии  ). определяется аналогично ,
). определяется аналогично ,

и аналогичным образом можно разделить на вклады от взаимодействий между различными масштабами. Этот поток субфильтра также требует модели субфильтра.
Вывод
Используя нотацию Эйнштейна, уравнения Навье – Стокса для несжимаемой жидкости в декартовых координатах имеют вид


Фильтрация уравнения импульса приводит к

Если мы предположим, что фильтрация и дифференцирование коммутируют, то

Это уравнение моделирует изменения во времени фильтруемых переменных  . Поскольку нефильтрованные переменные
. Поскольку нефильтрованные переменные  неизвестны, невозможно напрямую вычислить
неизвестны, невозможно напрямую вычислить  . Однако величина
. Однако величина  известен. Производится замена:
известен. Производится замена:

Пусть  . Результирующая система уравнений представляет собой уравнения LES:
. Результирующая система уравнений представляет собой уравнения LES:

Основные уравнения сжимаемой жидкости
Для основных уравнений сжимаемого потока каждое уравнение, начиная с сохранения массы, фильтруется. Это дает:

, что приводит к дополнительному условию подфильтра. Однако желательно избегать моделирования масштабов подфильтров уравнения сохранения массы. По этой причине Фавр предложил операцию фильтрации с взвешиванием по плотности, называемую фильтрацией Фавра, определенную для произвольной величины как:

который в пределе несжимаемости становится нормальным операция фильтрации. Это делает уравнение сохранения массы:

Затем эту концепцию можно распространить на напишите уравнение импульса для сжимаемого потока с фильтром Фавра. Следуя Времану:

где  - тензор напряжения сдвига, определяемый для ньютоновской жидкости по формуле:
- тензор напряжения сдвига, определяемый для ньютоновской жидкости по формуле:

и член  представляет вклад вязкости субфильтра от оценки вязкости
представляет вклад вязкости субфильтра от оценки вязкости  с использованием температуры, отфильтрованной по Фавру
с использованием температуры, отфильтрованной по Фавру  . Тензор подсеточных напряжений для поля импульса, отфильтрованного Фавром, задается следующим образом:
. Тензор подсеточных напряжений для поля импульса, отфильтрованного Фавром, задается следующим образом:

По аналогии, разложение Леонарда можно также записать для тензора остаточных напряжений для фильтрованное тройное произведение  . Тройное произведение можно переписать с помощью оператора фильтрации Фавра как
. Тройное произведение можно переписать с помощью оператора фильтрации Фавра как  , что - незакрытый термин (он требует знания полей и
, что - незакрытый термин (он требует знания полей и  , когда только поля
, когда только поля  и
и  известны). Его можно разбить аналогично выше, что дает тензор напряжения подфильтра
известны). Его можно разбить аналогично выше, что дает тензор напряжения подфильтра  . Этот член подфильтра можно разделить на вклады от трех типов взаимодействий: тензор Леондарда , представляющий взаимодействия между разрешенными шкалами; тензор Кларка , представляющий взаимодействия между разрешенными и неразрешенными шкалами; и тензор Рейнольдса , который представляет взаимодействия между неразрешенными масштабами.
. Этот член подфильтра можно разделить на вклады от трех типов взаимодействий: тензор Леондарда , представляющий взаимодействия между разрешенными шкалами; тензор Кларка , представляющий взаимодействия между разрешенными и неразрешенными шкалами; и тензор Рейнольдса , который представляет взаимодействия между неразрешенными масштабами.
Отфильтрованное уравнение кинетической энергии
В дополнение к Отфильтрованные уравнения массы и импульса, фильтрация уравнения кинетической энергии может дать дополнительную информацию. Поле кинетической энергии можно отфильтровать, чтобы получить полную отфильтрованную кинетическую энергию:

и полная отфильтрованная кинетическая энергия могут быть разложены на два члена: кинетическая энергия отфильтрованного поля скорости  ,
,

и остаточная кинетическая энергия  ,
,

такой, что  .
.
Уравнение сохранения для может быть получено путем умножения отфильтрованного переноса импульса уравнение по  , чтобы получить:
, чтобы получить:

где  - это диссипация кинетической энергии отфильтрованного поля скорости за счет вязкого напряжения, и
- это диссипация кинетической энергии отфильтрованного поля скорости за счет вязкого напряжения, и  представляет собой рассеяние кинетической энергии по шкале субфильтра (SFS).
представляет собой рассеяние кинетической энергии по шкале субфильтра (SFS).
Термины в левой части представляют собой перенос, а члены в правой части - термины-поглотители, которые рассеивают кинетическую энергию.
 Член рассеяния SFS представляет особый интерес, так как он представляет перенос энергии от больших разрешенных масштабов к малым неразрешенным масштабам. В среднем передает энергию от большого к малому масштабу. Однако мгновенно может быть положительным или отрицательным, что означает, что он также может действовать как исходный термин для , кинетическая энергия отфильтрованного поля скорости. Передача энергии от неразрешенных масштабов к разрешенным называется обратным рассеянием (и аналогично перенос энергии от разрешенных масштабов к неразрешенным называется прямое рассеяние ).
Член рассеяния SFS представляет особый интерес, так как он представляет перенос энергии от больших разрешенных масштабов к малым неразрешенным масштабам. В среднем передает энергию от большого к малому масштабу. Однако мгновенно может быть положительным или отрицательным, что означает, что он также может действовать как исходный термин для , кинетическая энергия отфильтрованного поля скорости. Передача энергии от неразрешенных масштабов к разрешенным называется обратным рассеянием (и аналогично перенос энергии от разрешенных масштабов к неразрешенным называется прямое рассеяние ).
Численные методы для LES
Моделирование больших вихрей включает решение дискретных отфильтрованных управляющих уравнений с использованием вычислительной гидродинамики. LES разрешает масштабы от размера области  до фильтра size , и поэтому необходимо разрешить значительную часть турбулентных флуктуаций с высоким волновым числом. Для этого требуются либо числовые схемы высокого порядка, либо точное разрешение сетки, если используются числовые схемы низкого порядка. В главе 13 Поуп рассматривается вопрос о том, насколько точное разрешение сетки
до фильтра size , и поэтому необходимо разрешить значительную часть турбулентных флуктуаций с высоким волновым числом. Для этого требуются либо числовые схемы высокого порядка, либо точное разрешение сетки, если используются числовые схемы низкого порядка. В главе 13 Поуп рассматривается вопрос о том, насколько точное разрешение сетки  необходимо для разрешения отфильтрованной скорости field
необходимо для разрешения отфильтрованной скорости field  . Ghosal обнаружил, что для low-ord В схемах дискретизации, таких как те, которые используются в методах конечного объема, ошибка усечения может быть того же порядка, что и вклады масштаба подфильтра, если только ширина фильтра значительно больше чем шаг сетки . Хотя схемы четного порядка имеют ошибку усечения, они недиссипативны, и поскольку модели масштаба подфильтра диссипативны, схемы четного порядка не будут влиять на вклад масштабной модели подфильтра так сильно, как диссипативные схемы.
. Ghosal обнаружил, что для low-ord В схемах дискретизации, таких как те, которые используются в методах конечного объема, ошибка усечения может быть того же порядка, что и вклады масштаба подфильтра, если только ширина фильтра значительно больше чем шаг сетки . Хотя схемы четного порядка имеют ошибку усечения, они недиссипативны, и поскольку модели масштаба подфильтра диссипативны, схемы четного порядка не будут влиять на вклад масштабной модели подфильтра так сильно, как диссипативные схемы.
Реализация фильтра
Операция фильтрации при моделировании больших вихрей может быть неявной или явной. Неявная фильтрация учитывает, что масштабная модель подфильтра будет рассеиваться таким же образом, как и многие численные схемы. Таким образом, сетку или схему численной дискретизации можно принять за фильтр нижних частот LES. Хотя при этом полностью используется разрешение сетки и исключаются вычислительные затраты на вычисление члена масштабной модели подфильтра, трудно определить форму LES-фильтра, которая связана с некоторыми численными проблемами. Кроме того, ошибка усечения также может стать проблемой.
При явной фильтрации фильтр LES применяется к дискретным уравнениям Навье – Стокса, обеспечивая четко определенную форму фильтра и уменьшая усечение ошибка. Однако явная фильтрация требует более тонкой сетки, чем неявная фильтрация, и вычислительные затраты увеличиваются с  . В главе 8 Sagaut (2006) численные значения LES рассматриваются более подробно.
. В главе 8 Sagaut (2006) численные значения LES рассматриваются более подробно.
Граничные условия моделирования больших вихрей
Граничные условия на входе значительно влияют на точность LES и обработку условий на входе для LES это сложная проблема. Теоретически хорошее граничное условие для LES должно содержать следующие особенности:
(1) предоставление точной информации о характеристиках потока, то есть скорости и турбулентности;
(2) удовлетворяющие уравнениям Навье-Стокса и другой физике;
(3) легко реализовать и приспособить к различным случаям.
В настоящее время методы создания условий на входе для LES в целом разделены на две категории, классифицированные Табором и др. :
Первый метод создания турбулентных входов состоит в их синтезе в соответствии с конкретными случаями, такие как методы Фурье, принцип ортогонального разложения (POD) и вихревые методы. Методы синтеза пытаются создать турбулентное поле на впусках, которое имеет подходящие свойства, подобные турбулентности, и позволяет легко задавать параметры турбулентности, такие как турбулентная кинетическая энергия и скорость турбулентной диссипации. Кроме того, условия на входе, создаваемые с помощью случайных чисел, не требуют больших вычислительных затрат. Однако у метода есть один серьезный недостаток. Синтезированная турбулентность не удовлетворяет физической структуре потока жидкости, определяемой уравнениями Навье-Стокса.
Второй метод включает в себя отдельный расчет и предварительный расчет для создания базы данных турбулентности, которую можно ввести в основное вычисление на входах. База данных (иногда называемая «библиотекой») может быть создана несколькими способами, такими как циклические домены, заранее подготовленная библиотека и внутреннее отображение. Однако метод создания турбулентного притока с помощью моделирования предвестников требует большой вычислительной мощности.
Исследователи, изучающие применение различных типов синтетических расчетов и расчетов предшественников, обнаружили, что чем более реалистична турбулентность на входе, тем точнее LES предсказывает результаты.
Моделирование неразрешенных масштабов
Чтобы обсудить моделирование неразрешенных шкал, сначала необходимо классифицировать неразрешенные шкалы. Они делятся на две группы: разрешенные шкалы субфильтров (SFS) и субсеточные шкалы (SGS).
Разрешенные шкалы субфильтров представляют шкалы с волновыми числами, превышающими волновое число отсечки  , но чьи эффекты смягчаются фильтр. Разрешенные шкалы субфильтров существуют только тогда, когда используются фильтры, нелокальные в волновом пространстве (такие как блок или фильтр Гаусса ). Эти разрешенные шкалы субфильтров должны быть смоделированы с использованием реконструкции фильтра.
, но чьи эффекты смягчаются фильтр. Разрешенные шкалы субфильтров существуют только тогда, когда используются фильтры, нелокальные в волновом пространстве (такие как блок или фильтр Гаусса ). Эти разрешенные шкалы субфильтров должны быть смоделированы с использованием реконструкции фильтра.
Масштаб подсетки - это любой масштаб, который меньше ширины отсекающего фильтра . Форма модели SGS зависит от реализации фильтра. Как упоминалось в разделе Численные методы для LES, если рассматривается неявный LES, модель SGS не реализуется, и предполагается, что численные эффекты дискретизации имитируют физику неразрешенных турбулентных движений.
Подсеточные модели
Без универсально допустимого описания турбулентности при построении и применении моделей SGS должна использоваться эмпирическая информация, дополненная фундаментальными физическими ограничениями, такими как галилеевская инвариантность. Существуют два класса моделей SGS; первый класс - это функциональные модели, а второй класс - это структурные модели . Некоторые модели можно отнести к обеим категориям.
Функциональные модели (вихревой вязкости)
Функциональные модели проще, чем структурные, они сосредоточены только на рассеивании энергии с физически правильной скоростью. Они основаны на подходе искусственной вихревой вязкости, где эффекты турбулентности объединяются в турбулентную вязкость. Подход рассматривает диссипацию кинетической энергии в подсеточных масштабах как аналог молекулярной диффузии. В этом случае девиаторная часть  моделируется как:
моделируется как:

где  - турбулентная вихревая вязкость, а
- турбулентная вихревая вязкость, а  - тензор скорости деформации.
- тензор скорости деформации.
На основе анализа размеров вихревая вязкость должна иметь единицы ![\left[\nu _{{\mathrm {t}}}\right]={\frac {{\mathrm {m^{2}}}}{{\mathrm {s}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/184c1fccb884babf37ef4fde3f123842c969d309) . Большинство моделей вихревой вязкости SGS моделируют вихревую вязкость как произведение характерного масштаба длины и характерного масштаба скорости.
. Большинство моделей вихревой вязкости SGS моделируют вихревую вязкость как произведение характерного масштаба длины и характерного масштаба скорости.
Модель Смагоринского – Лилли
Первой разработанной моделью SGS была модель SGS Смагоринского – Лилли, которая была разработана Смагоринским и использовалась в первом моделировании LES Дирдорфом. Он моделирует вихревую вязкость как:

где  - размер сетки, а
- размер сетки, а  - постоянная величина.
- постоянная величина.
Этот метод предполагает, что производство и рассеяние энергии в малых масштабах находятся в равновесии, то есть  .
.
Германо-динамическая модель
Германо и др. идентифицировал ряд исследований с использованием модели Смагоринского, в каждом из которых были найдены разные значения постоянной Смагоринского для различных конфигураций потока. Пытаясь сформулировать более универсальный подход к моделям SGS, Germano et al. предложила динамическую модель Смагоринского, в которой использовались два фильтра: сеточный фильтр LES, обозначенный  , и тестовый фильтр LES, обозначенный
, и тестовый фильтр LES, обозначенный  . В этом случае разрешенный тензор турбулентных напряжений
. В этом случае разрешенный тензор турбулентных напряжений  определяется как
определяется как

, который также называют Germano личность. Величина  - тензор остаточных напряжений для шкалы тестового фильтра, а
- тензор остаточных напряжений для шкалы тестового фильтра, а  - тензор остаточных напряжений для сеточного фильтра, затем тест отфильтрован.
- тензор остаточных напряжений для сеточного фильтра, затем тест отфильтрован.
представляет вклад в напряжения SGS по шкале длины меньше, чем ширина тестового фильтра  , но больше, чем ширина фильтра сетки
, но больше, чем ширина фильтра сетки  . Затем динамическая модель находит коэффициент, который лучше всего соответствует идентичности Germano. Однако, поскольку тождество является тензорным уравнением, оно переопределено (пять уравнений для одного неизвестного), что побудило Лилли предложить метод минимальной ошибки наименьших квадратов, который приводит к уравнению для :
. Затем динамическая модель находит коэффициент, который лучше всего соответствует идентичности Germano. Однако, поскольку тождество является тензорным уравнением, оно переопределено (пять уравнений для одного неизвестного), что побудило Лилли предложить метод минимальной ошибки наименьших квадратов, который приводит к уравнению для :

где
 и
и 
Однако эта процедура была нестабильной в числовом отношении, поскольку числитель мог стать отрицательным и иметь большие колебания в часто наблюдались. Следовательно, часто используется дополнительное усреднение ошибки при минимизации, что приводит к:

This has made the dynamic model more stable and making the method more widely applicable. Inherent in the procedure is the assumption that the coefficient is invariant of scale (see review). The averaging can be a spatial averaging over directions of statistical homogeneity (e.g. volume for homogeneous turbulence or wall-parallel planes for channel flow as originally used in Germano et al.), or time following Lagrangian fluid trajectories.
Structural models
See also
.
Further reading
- Heus, T.; van Heerwaarden, C. C.;Jonker, H. J. J.; Pier Siebesma, A.; Axelsen, S.«Formulation of the Dutch Atmospheric Large-Eddy Simulation (DALES) and overview of its applications » Geoscientific Model Development, 3, 2, 30-09-2010, pàg. 415–444. DOI : 10.5194/gmd-3-415-2010. ISSN : 1991-9603.
References

 Моделирование крупных вихрей в поле скорости турбулентного газа.
Моделирование крупных вихрей в поле скорости турбулентного газа.  Поле скорости, созданное прямым численным моделированием (DNS) однородного распада g турбулентность. Размер домена:
Поле скорости, созданное прямым численным моделированием (DNS) однородного распада g турбулентность. Размер домена:  То же поле скорости DNS, отфильтрованное с использованием блочного фильтра и
То же поле скорости DNS, отфильтрованное с использованием блочного фильтра и  То же самое поле скорости DNS, отфильтрованное с использованием прямоугольного фильтра и
То же самое поле скорости DNS, отфильтрованное с использованием прямоугольного фильтра и