Метод Маколея (метод двойного интегрирования) представляет собой метод, используемый в структурном анализе для определения отклонения от Эйлера-Бернулли пучков. Использование техники Маколея очень удобно в случаях прерывистой и / или дискретной нагрузки. Обычно с помощью этого метода удобно обрабатывать частичные равномерно распределенные нагрузки (udl) и равномерно изменяющиеся нагрузки (uvl) по пролету и ряд сосредоточенных нагрузок.
Первое описание метода на английском языке было сделано Маколеем. Фактический подход, по-видимому, был разработан Клебшем в 1862 году. Метод Маколея был обобщен для балок Эйлера-Бернулли с осевым сжатием, балок Тимошенко, упругих оснований и проблем, в которых жесткость на изгиб и сдвиг изменяется в балке скачкообразно..
Содержание
- 1 Метод
- 2 Пример: балка без опоры с точечной нагрузкой
- 2.1 Граничные условия
- 2.2 Максимальный прогиб
- 2.3 Прогиб в точке приложения нагрузки
- 2.4 Прогиб в средней точке
- 2.5 Частный случай симметрично приложенной нагрузки
- 3 ссылки
- 4 См. Также
Метод
Отправной точкой является соотношение из теории пучков Эйлера-Бернулли.

Где прогиб, а это изгибающий момент. Это уравнение проще, чем уравнение пучка четвертого порядка, и его можно проинтегрировать дважды, чтобы определить, известно ли значение как функция от. Для общих нагрузок может быть выражено в виде 



где величины представляют изгибающие моменты от точечных нагрузок, а величина - скобка Маколея, определяемая как 


Обычно при интеграции мы получаем 
![\ int P (xa) ~ dx = P \ left [{\ cfrac {x ^ {2}} {2}} - ax \ right] + C](https://wikimedia.org/api/rest_v1/media/math/render/svg/00104f53a98e8830c6213b97a59c6a73a39b0b25)
Однако при интегрировании выражений, содержащих скобки Маколея, мы имеем

с разницей между двумя выражениями, содержащимися в константе. Использование этих правил интегрирования упрощает расчет прогиба балок Эйлера-Бернулли в ситуациях, когда имеется несколько точечных нагрузок и точечных моментов. Метод Маколея предшествует более сложным концепциям, таким как дельта-функции Дирака и ступенчатые функции, но дает те же результаты для задач пучка. 
Пример: балка с простой опорой и точечной нагрузкой
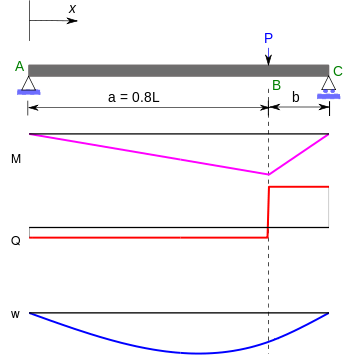
Балка с простой опорой и одной эксцентричной сосредоточенной нагрузкой.
На иллюстрации метода Маколея рассматривается балка с простой опорой и одной эксцентричной сосредоточенной нагрузкой, как показано на рисунке рядом. Первый шаг - найти. Реакции на опорах A и C определяются из баланса сил и моментов как

Следовательно, и изгибающий момент в точке D между A и B () определяется выражением 


Используя соотношение момент-кривизна и выражение Эйлера-Бернулли для изгибающего момента, имеем

Интегрируя это уравнение, мы получаем, для,

В 

Для точки D в области BC () изгибающий момент равен 

В подходе Маколея мы используем форму скобки Маколея в приведенном выше выражении, чтобы представить тот факт, что точечная нагрузка была приложена в точке B, т. Е.

Следовательно, уравнение пучка Эйлера-Бернулли для этой области имеет вид

Интегрируя приведенное выше уравнение, получаем:

В 

Сравнивая уравнения (iii) и (vii) и (iv) и (viii), мы замечаем, что из-за непрерывности в точке B, и. Вышеупомянутое наблюдение подразумевает, что для двух рассматриваемых областей, хотя уравнения для изгибающего момента и, следовательно, для кривизны разные, константы интегрирования, полученные при последовательном интегрировании уравнения кривизны для двух областей, одинаковы. 

Вышеприведенный аргумент справедлив для любого количества / типа разрывов в уравнениях кривизны, при условии, что в каждом случае уравнение сохраняет член для последующей области в форме и т. Д. Следует помнить, что для любого x, давая величины в пределах квадратными скобками, как и в приведенном выше случае, -ve следует пренебречь, а вычисления следует проводить с учетом только тех величин, которые дают знак + ve для членов в скобках. 
Возвращаясь к проблеме, у нас есть
Очевидно, что следует рассматривать только первый член, и как члены, так и решение 

![{\ begin {align} EI {\ dfrac {dw} {dx}} amp; = \ left [{\ dfrac {Pbx ^ {2}} {2L}} + C_ {1} \ right] - {\ cfrac {P \ langle xa \ rangle ^ {2}} {2}} \\ EIw amp; = \ left [{\ dfrac {Pbx ^ {3}} {6L}} + C_ {1} x + C_ {2} \ right] - {\ cfrac {P \ langle xa \ rangle ^ {3}} {6}} \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0e84b84261fd44c6feb89378e931718d49721f75)
Обратите внимание, что константы помещаются сразу после первого члена, чтобы указать, что они соответствуют первому члену when и обоим терминам when. Скобки Маколея служат напоминанием о том, что количество справа равно нулю при рассмотрении точек с.
Граничные условия
Как в,. Кроме того, как на, 



![\ left [{\ dfrac {PbL ^ {2}} {6}} + C_ {1} L \ right] - {\ cfrac {P (La) ^ {3}} {6}} = 0](https://wikimedia.org/api/rest_v1/media/math/render/svg/fbe53dbe38b55df5c8b1fdbe78f56ce02433ff4c)
или,

Следовательно,
![{\ begin {align} EI {\ dfrac {dw} {dx}} amp; = \ left [{\ dfrac {Pbx ^ {2}} {2L}} - {\ cfrac {Pb} {6L}} (L ^ {2} -b ^ {2}) \ right] - {\ cfrac {P \ langle xa \ rangle ^ {2}} {2}} \\ EIw amp; = \ left [{\ dfrac {Pbx ^ {3}} {6L}} - {\ cfrac {Pbx} {6L}} (L ^ {2} -b ^ {2}) \ right] - {\ cfrac {P \ langle xa \ rangle ^ {3}} {6} } \ конец {выровнено}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d84807222df349c7dd327e1dba3f6403343d0287)
Максимальный прогиб
Для быть максимально,. Предполагая, что это происходит, поскольку у нас есть 

или

Ясно, что не может быть решением. Следовательно, максимальный прогиб определяется выражением 
![EIw _ {{{\ mathrm {max}}}} = {\ cfrac {1} {3}} \ left [{\ dfrac {Pb (L ^ {2} -b ^ {2}) ^ {{3/2 }}} {6 {\ sqrt {3}} L}} \ right] - {\ cfrac {Pb (L ^ {2} -b ^ {2}) ^ {{3/2}}} {6 {\ sqrt {3}} L}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1548098928f11f7ec7db4246fbae699620673cbe)
или,

Прогиб в точке приложения нагрузки
В точке B прогиб равен 

или

Прогиб в средней точке
Поучительно изучить соотношение. В

![EIw (L / 2) = {\ dfrac {PbL ^ {2}} {48}} - {\ cfrac {Pb} {12}} (L ^ {2} -b ^ {2}) = - {\ frac {Pb} {12}} \ left [{\ frac {3L ^ {2}} {4}} - b ^ {2} \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/56fce5f4e619b932d360463f54937de2ec3fdf55)
Следовательно,
![{\ frac {w _ {{{\ mathrm {max}}}}} {w (L / 2)}} = {\ frac {4 (L ^ {2} -b ^ {2}) ^ {{3 / 2}}} {3 {\ sqrt {3}} L \ left [{\ frac {3L ^ {2}} {4}} - b ^ {2} \ right]}} = {\ frac {4 (1 - {\ frac {b ^ {2}} {L ^ {2}}}) ^ {{3/2}}} {3 {\ sqrt {3}} \ left [{\ frac {3} {4} } - {\ frac {b ^ {2}} {L ^ {2}}} \ right]}} = {\ frac {16 (1-k ^ {2}) ^ {{3/2}}} { 3 {\ sqrt {3}} \ left (3-4k ^ {2} \ right)}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/58516703451deb7653cb785011112828274f2a8e)
где и для. Даже когда нагрузка от опоры составляет 0,05L, ошибка в оценке прогиба составляет всего 2,6%. Следовательно, в большинстве случаев оценка максимального отклонения может быть произведена довольно точно с разумной погрешностью путем определения отклонения в центре. 

Частный случай симметрично приложенной нагрузки
Когда, чтобы быть максимальным 
![x = {\ cfrac {[L ^ {2} - (L / 2) ^ {2}] ^ {{1/2}}} {{\ sqrt {3}}}} = {\ frac {L} { 2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91d7eeb107d2618eccb4a0ff104c39cc4523f690)
а максимальный прогиб составляет
![w _ {{{\ mathrm {max}}}} = - {\ dfrac {P (L / 2) b [L ^ {2} - (L / 2) ^ {2}] ^ {{3/2}} } {9 {\ sqrt {3}} EIL}} = - {\ frac {PL ^ {3}} {48EI}} = w (L / 2) ~.](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ea8c8b2409cb8eec0ee784655bf133dcea4df02)
Ссылки
Смотрите также
