
Войти
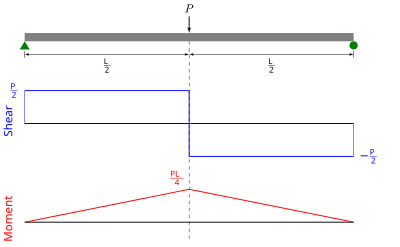 Диаграмма сдвига и момента для свободно опертой балки с сосредоточенной нагрузкой в середине пролета.
Диаграмма сдвига и момента для свободно опертой балки с сосредоточенной нагрузкой в середине пролета. A изгибающий момент - это реакция, вызываемая в структурном элементе, когда к элементу прикладывается внешняя сила или момент, вызывающая изгиб. Наиболее распространенным или простым элементом конструкции, подверженным изгибающим моментам, является балка. На схеме показана балка, которая просто поддерживается с обоих концов. Простая опора означает, что каждый конец балки может вращаться; поэтому каждая торцевая опора не имеет изгибающего момента. Концы могут реагировать только на сдвигающие нагрузки. У других балок оба конца могут быть закреплены; Таким образом, каждая торцевая опора имеет как изгибающий момент, так и нагрузки реакции сдвига. Балки также могут иметь фиксированный один конец и простой опорный конец. Самый простой тип балки - это консоль, которая фиксируется на одном конце и свободна на другом конце (ни простая, ни фиксированная). В действительности опоры балки обычно не являются ни абсолютно неподвижными, ни абсолютно свободно вращающимися.
Внутренние реакционные нагрузки в поперечном сечении структурного элемента могут быть разделены на равнодействующую силу и результирующую пару. Для достижения равновесия момент, создаваемый внешними силами (и внешними моментами), должен уравновешиваться парой, вызванной внутренними нагрузками. Результирующая внутренняя пара называется изгибающим моментом, а результирующая внутренняя сила называется поперечной силой (если она перпендикулярна плоскости элемента) или нормальной силой (если он находится по плоскости элемента).
Изгибающий момент на участке через элемент конструкции может быть определен как сумма моментов относительно этого участка всех внешних сил, действующих на одну сторону этого участка. Силы и моменты по обеим сторонам секции должны быть равны, чтобы противодействовать друг другу и поддерживать состояние равновесия, чтобы в результате суммирования моментов был получен одинаковый изгибающий момент, независимо от того, с какой стороны секции выбрано. Если изгибающие моменты по часовой стрелке приняты как отрицательные, то отрицательный изгибающий момент внутри элемента вызовет «закручивание», а положительный момент вызовет «провисание». Таким образом, ясно, что точка нулевого изгибающего момента внутри балки является точкой обратного прогиба - это точка перехода от коробления к провисанию или наоборот.
Моменты и крутящие моменты измеряются как сила, умноженная на расстояние, поэтому они имеют в качестве единицы ньютон-метр (Н · м) или фунт- фут (фунт-сила · фут). Понятие изгибающего момента очень важно в машиностроении (особенно в гражданском и машиностроении ) и физике.
Растягивающие и сжимающие напряжения увеличиваются пропорционально изгибающему моменту, но также зависят от второго момента площади поперечное сечение балки (то есть форма поперечного сечения, такая как круг, квадрат или двутавровая балка, являющиеся общими структурными формами). Разрушение при изгибе произойдет, когда изгибающий момент будет достаточным для создания растягивающих напряжений, превышающих напряжение текучести материала по всему поперечному сечению. В структурном анализе это разрушение при изгибе называется пластическим шарниром, поскольку полная несущая способность элемента конструкции не достигается, пока полное поперечное сечение не превышает предел текучести. Возможно, что разрушение конструктивного элемента в сдвиге может произойти до разрушения при изгибе, однако механика разрушения при сдвиге и изгибе различна.
Моменты рассчитываются путем умножения внешних векторов сил (нагрузок или реакций) на векторное расстояние, на котором они действуют. При анализе всего элемента имеет смысл рассчитывать моменты на обоих концах элемента, в начале, в центре и в конце любых равномерно распределенных нагрузок и непосредственно под любыми точечными нагрузками. Конечно, любые "шарнирные соединения" внутри конструкции допускают свободное вращение, и поэтому в этих точках возникает нулевой момент, поскольку нет возможности передавать вращающие силы с одной стороны на другую.
Чаще используется соглашение, согласно которому изгибающий момент по часовой стрелке слева от рассматриваемой точки считается положительным. Тогда это соответствует второй производной функции, которая, если она положительна, указывает на кривизну, которая «ниже в центре», то есть провисание. При определении моментов и кривизны таким образом легче использовать расчет для определения уклонов и прогибов.
Критические значения внутри балки обычно аннотируются с помощью диаграммы изгибающего момента, где отрицательные моменты нанесены в масштабе над горизонтальной линией, а положительные - под ней. Изгибающий момент изменяется линейно по ненагруженным участкам и параболически по равномерно нагруженным участкам.
Технические описания расчета изгибающих моментов могут сбивать с толку из-за необъяснимых условных обозначений и неявных предположений. В приведенных ниже описаниях используется векторная механика для вычисления моментов силы и изгибающих моментов в попытке объяснить, исходя из первых принципов, почему выбраны определенные условные обозначения.
 Вычисление момента силы в балке.
Вычисление момента силы в балке. Важной частью определения изгибающих моментов в практических задачах является вычисление моментов силы. Пусть 

где 




где 
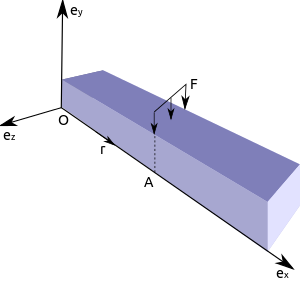
На соседнем рисунке показана балка, на которую действует сила 


Следовательно,

Момент относительно оси 

Отрицательное значение предполагает, что момент, имеет тенденцию вращать тело по часовой стрелке вокруг оси, которая должна иметь знак минус . Однако фактический знак зависит от выбора трех осей 

Тогда

Для этого нового выбора осей положительный момент имеет тенденцию вращаться тело по часовой стрелке вокруг оси.
В твердом теле или в свободном деформируемом теле приложение момента силы вызывает чистое вращение. Но если деформируемое тело сковано, оно развивает внутренние силы в ответ на внешнюю силу, так что равновесие сохраняется. Пример показан на рисунке ниже. Эти внутренние силы вызовут локальные деформации в теле.
Для равновесия сумма векторов внутренней силы равна приложенной внешней силе, а сумма векторов момента, созданных внутренними силами, равна моменту внешней силы. Векторы внутренней силы и момента ориентированы таким образом, что общая сила (внутренняя + внешняя) и момент (внешний + внутренний) системы равны нулю. Вектор внутреннего момента называется изгибающим моментом .
. Хотя изгибающие моменты использовались для определения напряженных состояний в конструкциях произвольной формы, физическая интерпретация вычисленных напряжений проблематична. Однако физические интерпретации изгибающих моментов в балках и пластинах имеют прямую интерпретацию как равнодействующие напряжения в поперечном сечении структурного элемента. Например, в балке на рисунке вектор изгибающего момента из-за напряжений в поперечном сечении A, перпендикулярном оси x, имеет вид

Расширяя это выражение, мы получаем

Определим компоненты изгибающего момента как

Вычисляются внутренние моменты относительно начала координат, которое находится на нейтральной оси балки или пластины, и интегрирование осуществляется по толщине (
 Расчет изгибающего момента в балке.
Расчет изгибающего момента в балке. In балка, показанная на соседнем рисунке, внешние силы - это приложенная сила в точке A(


![{\ displaystyle \ mathbf {M} _ {xz} = - \ left [\ int _ {z} \ left [ \ int _ {0} ^ {h} y \, \ sigma _ {xx} \, dy \ right] \, dz \ right] \ mathbf {e} _ {z} \,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f580ca80ae5403763cf0a628f588be42729aa2b1)
где 
Чтобы вычислить 

Для получения каждой реакции требуется второе уравнение. Уравновешивание моментов относительно любой произвольной точки X даст нам второе уравнение, которое мы можем использовать для решения для 


Если 

Оценка перекрестных продуктов:

Если мы решим для реакций, мы получим

Теперь, чтобы получить внутренний изгибающий момент в X, мы суммируем все моменты относительно точки X из-за ко всем внешним силам справа от X (на положительной стороне 

Мы можем проверить этот ответ, посмотрев на диаграмма свободного тела и часть балки слева от точки X, а полный момент, создаваемый этими внешними силами, равен
![{\ displaystyle \ mathbf {M} = (\ mathbf {r} _ { A} - \ mathbf {r} _ {X}) \ times \ mathbf {F} + (- \ mathbf {r} _ {X}) \ times \ mathbf {R} _ {O} = \ left [(x_ {A} -x) \ mathbf {e} _ {x} \ right] \ times \ left (-F \ mathbf {e} _ {y} \ right) + \ left (-x \ mathbf {e} _ { x} \ right) \ times \ left (R_ {O} \ mathbf {e} _ {y} \ right) \,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4484fe4bc7079fc65cbdd6685d00a438a24fa1c)
Если мы вычислим перекрестные произведения, мы получим

Благодаря равновесию внутренний изгибающий момент из-за внешних сил слева от X должен быть точно уравновешен внутренней поворотной силой, полученной с учетом части балки справа от X

что явно так.
В приведенном выше обсуждении неявно предполагается, что изгибающий момент положительный, когда верхняя часть балки сжимается. Это можно увидеть, если мы рассмотрим линейное распределение напряжений в балке и найдем результирующий изгибающий момент. Пусть верх балки сжимается под действием напряжения 


![M_ {xz } = - \ left [\ int_z \ int _ {- h / 2} ^ {h / 2} y \, (- y \ sigma_0) \, dy \, dz \ right] = \ sigma_0 \, I](https://wikimedia.org/api/rest_v1/media/math/render/svg/8100c76caea229044e6fab8b76953ef45b4f31dc)
, где 
Многие авторы следуют другому соглашению, согласно которому результирующее напряжение 
![\ mathbf {M} _ {xz} = \ left [\ int_z \ int _ {- h / 2} ^ {h / 2} y \, \ sigma_ {xx} \, dy \, dz \ right] \ mathbf {e} _z \,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/35847d59d251a389b521d4f9a5caa6465c255ce1)
В этом случае положительные изгибающие моменты означают, что верх балки находится в растяжении. Конечно, определение top зависит от используемой системы координат. В приведенных выше примерах верхняя часть - это место с наибольшей координатой
| На Викискладе есть материалы, связанные с Изгибающий момент. |
| В Викиверситете есть учебные ресурсы по диаграммам поперечной силы и изгибающего момента |