
Войти
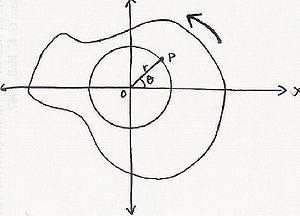 Вращение твердого тела P вокруг фиксированной оси O.
Вращение твердого тела P вокруг фиксированной оси O. Угловое смещение тела - это угол в радианах (градусов, оборотов ), через который точка вращается вокруг центра или линия была повернута в определенном смысле относительно указанной оси . Когда тело вращается вокруг своей оси, движение нельзя просто анализировать как частицу, поскольку при круговом движении оно претерпевает изменяющуюся скорость и ускорение в любой момент времени (t). Когда речь идет о вращении тела, становится проще считать само тело твердым. Тело обычно считается твердым, когда расстояние между всеми частицами остается постоянным на протяжении всего движения тела, например, части его массы не разлетаются. В реальном смысле все может быть деформируемым, однако это воздействие минимально и незначительно. Таким образом, вращение твердого тела над фиксированной осью называется вращательным движением.
В примере, показанном на справа (или выше в некоторых мобильных версиях) частица или тело P находится на фиксированном расстоянии r от начала координат O, вращаясь против часовой стрелки. Затем становится важным представить положение частицы P в терминах ее полярных координат (r, θ). В этом конкретном примере значение θ изменяется, а значение радиуса остается прежним. (В прямоугольных координатах (x, y) и x, и y меняются со временем). Когда частица движется по окружности, она проходит длину дуги s, которая становится связанной с угловым положением через соотношение: -

Угловое смещение может быть измерено в радианах или градусах. Использование радианов обеспечивает очень простую связь между расстоянием, пройденным по окружности, и расстоянием r от центра.

Например, если тело вращается на 360 ° по окружности радиуса r, угловое смещение определяется расстоянием прошел по окружности, равной 2πr, деленной на радиус: 


Когда частица перемещается из точки P в точку Q за 

 Рисунок 1 : теорема Эйлера о вращении. Большой круг при вращении превращается в другой большой круг, всегда оставляя диаметр сферы в исходном положении.
Рисунок 1 : теорема Эйлера о вращении. Большой круг при вращении превращается в другой большой круг, всегда оставляя диаметр сферы в исходном положении.  Рисунок 2 : Вращение, представленное осью Эйлера и углом.
Рисунок 2 : Вращение, представленное осью Эйлера и углом. В трех измерениях, угловой смещение - это сущность с направлением и величиной. Направление определяет ось вращения, которая всегда существует в силу теоремы вращения Эйлера ; величина определяет вращение в радианах вокруг этой оси (используя правило правой руки для определения направления). Этот объект называется ось-угол.
. Несмотря на направление и величину, угловое смещение не является вектором , потому что оно не подчиняется закону коммутативности для сложения. Тем не менее, имея дело с бесконечно малыми вращениями, бесконечно малые величины второго порядка можно отбросить, и в этом случае появляется коммутативность.
Существует несколько способов описания углового смещения, таких как матрицы вращения или углы Эйлера. См. Диаграммы на SO (3) для других.
Учитывая, что любой кадр в пространстве может быть описан матрицей вращения, смещение между ними также может быть описано матрицей вращения. Поскольку 


В пределе у нас будет бесконечно малая матрица вращения.
Бесконечно малое угловое смещение - это матрица бесконечно малого вращения :

Здесь мы можем ввести тензор бесконечно малых угловых смещений или генератор вращения связан:

Такой что соответствующая матрица вращения имеет вид 
Предположим, мы задаем ось вращения единичным вектором [x, y, z], и предположим, что у нас бесконечно малый поворот угла Δθ об этом векторе. Расширяя матрицу вращения как бесконечное сложение и используя подход первого порядка, матрица вращения ΔR представлена как:

Конечный поворот на угол θ вокруг этой оси можно рассматривать как последовательность небольших вращений вокруг та же ось. Аппроксимируя Δθ как θ / N, где N - большое число, поворот θ вокруг оси можно представить как:

Можно видеть, что теорема Эйлера по существу утверждает, что все повороты могут быть представлены в этой форме. Произведение 
Можно вывести простое выражение для генератора G. Начнем с произвольной плоскости, определяемой парой перпендикулярных единичных векторов a и b. В этой плоскости можно выбрать произвольный вектор x с перпендикуляром y. Затем вычисляется y в терминах x, и подстановка в выражение для вращения в плоскости дает матрицу вращения R, которая включает генератор G = ba - ab.
![{\displaystyle {\begin{aligned}x=a\cos \left(\alpha \right)+b\sin \left(\alpha \right)\\y=-a\sin \left(\alpha \right)+b\cos \left(\alpha \right)\\\cos \left(\alpha \right)=a^{T}x\\\sin \left(\alpha \right)=b^{T}x\\y=-ab^{T}x+ba^{T}x=\left(ba^{T}-ab^{T}\right)x\\\\x'=x\cos \left(\beta \right)+y\sin \left(\beta \right)\\=\left[I\cos \left(\beta \right)+\left(ba^{T}-ab^{T}\right)\sin \left(\beta \right)\right]x\\\\R=I\cos \left(\beta \right)+\left(ba^{T}-ab^{T}\right)\sin \left(\beta \right)\\=I\cos \left(\beta \right)+G\sin \left(\beta \right)\\\\G=ba^{T}-ab^{T}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e1a6b1babbc0178942ec6037d916d02cf7af614e)
Чтобы включить векторы вне плоскости во вращение необходимо изменить приведенное выше выражение для R, включив два оператора проекции , которые разделяют пространство. Эту модифицированную матрицу вращения можно переписать как экспоненциальную функцию.
![{\ displaystyle {\ begin {align} P_ {ab} = - G ^ {2} \\ R = I-P_ {ab} + \ left [I \ cos \ left (\ beta \ right) + G \ sin \ left (\ beta \ right) \ right] P_ {ab} = e ^ {G \ beta} \\\ конец {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e718839b0ef29899eb017389941edb0cb35cf6d8)
С помощью этих генераторов анализ часто бывает проще, чем с полным матрица вращения. Анализ в терминах генераторов известен как алгебра Ли группы вращений.
Матрицы в алгебре Ли сами по себе не являются вращениями; кососимметричные матрицы - это производные, пропорциональные разности поворотов. Фактическое «дифференциальное вращение» или матрица бесконечно малого вращения имеет вид

где dθ исчезающе мала и A ∈ so (n), например, с A = L x,
![dL_ {x} = \ left [{\ begin { smallmatrix} 1 0 0 \\ 0 1 -d \ theta \\ 0 d \ theta 1 \ end {smallmatrix}} \ right].](https://wikimedia.org/api/rest_v1/media/math/render/svg/8cc3a3ae5fa4a61883297917309103ba64f28385)
Правила вычисления следующие обычно, за исключением того, что бесконечно малые второго порядка обычно отбрасываются. С этими правилами эти матрицы не удовлетворяют всем тем же свойствам, что и обычные матрицы конечного вращения при обычном рассмотрении бесконечно малых. Оказывается, порядок, в котором применяются бесконечно малые вращения, не имеет значения. Чтобы увидеть этот пример, обратитесь к бесконечно малым вращениям SO (3).
Соединение алгебры Ли с группой Ли - это экспоненциальное отображение, которое определяется с использованием стандартная матричная экспоненциальная серия для e Для любой кососимметричной матрицы A, exp (A) всегда является матрицей вращения.
Важным практическим примером является 3 × 3 случай. В группе вращений SO (3) показано, что можно идентифицировать каждый A ∈, поэтому (3) с вектором Эйлера ω = θ u, где u = (x, y, z) - вектор единичной величины.
По свойствам идентификации su (2) ≅ ℝ, u находится в нулевом пространстве A. Таким образом, u является остается инвариантным по exp (A) и, следовательно, является осью вращения.
Использование формулы вращения Родригеса в матричной форме с θ = ⁄ 2 + ⁄ 2 вместе со стандартным double формулы углов получаем,
![{\ begin {align} \ exp (A) {} = \ exp (\ theta ({\ boldsymbol {u \ cdot L}})) = \ exp \ left (\ left [{\ begin {smallmatrix} 0 -z \ theta y \ theta \\ z \ theta 0 -x \ theta \ \ -y \ theta x \ theta 0 \ end {smallmatrix}} \ right] \ right) = {\ boldsymbol {I}} + 2 \ cos {\ frac {\ theta} {2}} \ sin {\ frac {\ theta} {2}} ~ {\ boldsymbol {u \ cdot L}} + 2 \ sin ^ {2} {\ frac {\ theta} {2}} ~ ({\ boldsymbol {u \ cdot L}}) ^ {2}, \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/29451aaef2328540a9dd69daa787ae4da2c222b9)
где c = cos ⁄ 2, s = sin ⁄ 2.
Это матрица для поворота вокруг оси u на угол θ в полуугловой форме. Для получения полной информации см. экспоненциальная карта SO (3).
Обратите внимание, что для бесконечно малых углов члены второго порядка могут быть проигнорированы и остаются exp (A) = I + A