
Войти

A роликовый винт, также известный как планетарный роликовый винт или сателлитный роликовый винт, представляет собой прецизионный привод винтового типа с низким трением винтового типа , механическое устройство для преобразования вращательного движения в линейное или наоборот. Планетарные роликовые винтовые передачи используются в качестве исполнительного механизма во многих электромеханических линейных приводах. Из-за своей сложности роликовый винт является относительно дорогим приводом (на порядок дороже, чем шарико-винтовые пары ), но может подходить для высокоточных, высокоточных скоростные, тяжелые, долговечные и интенсивно используемые приложения.
Роликовые винтовые механизмы обычно используются в системах перемещения / позиционирования в различных отраслях промышленности, таких как производство и авиакосмическая промышленность.
 Стандартное синхронизирование роликовинтовой передачи
Стандартное синхронизирование роликовинтовой передачи Роликовинтовой винт - это механический привод аналогично шариковинтовой передаче , в которой в качестве элементов передачи нагрузки между гайкой и винтом вместо шариков используются ролики. Ролики обычно имеют резьбу, но также могут иметь канавки в зависимости от типа винтового ролика. Имея больше точек опоры, чем шарико-винтовые передачи в пределах заданного объема, роликовые винтовые пары могут быть более компактными для заданной грузоподъемности, обеспечивая при этом аналогичную эффективность (75% -90%) на низких и средних скоростях и сохраняя относительно высокий КПД на высоких скоростях. Роликовые винты могут превосходить шарико-винтовые передачи по точности позиционирования, номинальной нагрузке, жесткости, скорости, ускорению и сроку службы. Стандартные роликовые винтовые приводы могут достигать динамической грузоподъемности свыше 130 тонн силы (превышение мощности единичного привода только для гидроцилиндров ).
Три основных элемента обычного планетарного роликового винта - это вал винта, гайка и планетарный ролик. Винт представляет собой вал с многозаходной V-образной резьбой, которая обеспечивает спиральную дорожку качения для множества роликов, радиально расположенных вокруг винта и закрытых гайкой с резьбой. Резьба винта обычно идентична внутренней резьбе гайки. Ролики вращаются в контакте с винтом и гайкой и служат в качестве элементов передачи с низким коэффициентом трения. Ролики обычно имеют однозаходную резьбу с выпуклыми боковыми поверхностями, которые ограничивают трение в контактах роликов с винтом и гайкой. Ролики обычно вращаются вокруг винта во время вращения (подобно планетарной шестерне на солнечную шестерню ), и поэтому известны как планетарные или сателлитные ролики. Как и в случае ходового винта или шарико-винтовой передачи, вращение гайки приводит к перемещению винта, а вращение винта приводит к перемещению гайки.
Для данного диаметра винта и количества заходов резьбы большее количество роликов соответствует более высокой статической нагрузочной способности, но не обязательно более высокой динамической нагрузочной способности. Для устранения люфта.
Карл Бруно Страндгрен разработал некоторые из первых эффективных форм роликовых винтов и подал заявку на патент в Ницце, Франция. Февраль 1942 г. Французский патент № 888.281 был выдан в августе 1943 г. и опубликован в декабре того же года. Первый коммерческий роликовый винт был разработан и изготовлен под его руководством в 1949 году и был установлен на локомотив узкой колеи, который работал на угольной шахте на севере Франции. Последующие агрегаты производились и устанавливались на станки, а с 1955 г. - на самолеты. В то время Карл Бруно Страндгрен подал заявку на новый патент, включающий подробные расчеты и подробные технологические соображения, за что в 1954 г. он получил патенты США на такой «механизм с резьбой», «Гайки и винтовые устройства» и «Роликовый винт». в 1965 году.
Типы роликовых винтов определяются по движению роликов относительно гайки и винта. Четыре имеющихся в продаже типа роликовых винтовых пар: стандартные, перевернутые, рециркуляционные и подшипниковые кольца.
Роликовые винты дифференциала, обычно являющиеся вариантами стандартного и рециркуляционного типов, также имеются в продаже. Дифференциальные роликовые винты изменяют соотношение скоростей вращения между роликами и винтом, изменяя углы боковых сторон и точки контакта резьбы или канавок. Таким образом, роликовые винты дифференциала изменяют эффективный ход винта. Уильям Дж. Роантри получил в США патент на «Роликовую гайку дифференциала» в 1968 году.
 Патентный чертеж стандартного роликового винта (1954) с легендой.
Патентный чертеж стандартного роликового винта (1954) с легендой. Стандартный планетарный винт роликовый винт также известен как роликовый винт без рециркуляции. Отсутствие осевого перемещения ролика относительно гайки и зацепление роликов с гайкой являются определяющими для стандартного типа роликового винта.
Гайка и винт имеют одинаковую многозаходную резьбу. Ролики имеют однозаходную резьбу с углом, соответствующим резьбе гайки. Соответствующий угол резьбы предотвращает осевое перемещение между гайкой и роликом во время вращения роликов. Узел гайки включает распорные кольца и зубчатые колеса, которые позиционируют и направляют ролики. Прокладочные кольца, которые вращаются внутри зубчатого венца, имеют равноудаленные отверстия, которые действуют как подшипники вращения для гладких шарнирных концов (шпилек) роликов. Зубчатые колеса синхронизируют вращение и вращение роликов вокруг оси винта, зацепляя зубья шестерни рядом с концами роликов. Дистанционные кольца вращаются вокруг оси с винтом синхронно с орбитой роликов. Дистанционные кольца плавают относительно гайки и фиксируются в осевом направлении стопорными кольцами, поскольку они вращаются вокруг винта с более низкой частотой (угловая скорость ), чем гайка.
Стандартные роликовые винты обычно идентифицируются по диаметру винта (обычно в диапазоне от 3,5 до 200 мм) и шагу (1 мм - 62 мм). Резьба винта (3–6 пусков) либо накатанная (меньшая мощность), либо шлифовка (большая мощность). Диаметр гайки и роликов (количество от 7 до 14) зависит от диаметра винта и шага.
Где:
 - эффективный диаметр винта или средний диаметр
- эффективный диаметр винта или средний диаметр  - эффективный диаметр ролика
- эффективный диаметр ролика - эффективный внутренний диаметр гайки
- эффективный внутренний диаметр гайки - начало резьбы на гайке и винте
- начало резьбы на гайке и винте - шаг винта
- шаг винта - резьба ролика шаг
- резьба ролика шаг Следующие соотношения применяются к стандартным и перевернутым роликовым винтам:
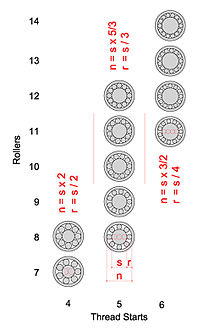 Стандартные конфигурации стандартных роликовых винтовых пар
Стандартные конфигурации стандартных роликовых винтовых пар  |  | передаточное отношение гайки к винту |
 | ||
 | | передаточное число ролика и винта |
 | ||
 | | передаточное отношение ролика к гайке |
 | ||
 | ||
 | | отношение шага резьбы ролика к |
шагу винта  |
Например, если
, то
Винт с обратным планетарным роликом также известен как винт с обратным роликом. Отсутствие осевого перемещения ролика относительно винта и передача роликов на винт являются определяющими для перевернутого типа планетарного роликового винта. Этот тип роликового винта был разработан одновременно со стандартным роликовым винтом.
Перевернутые роликовые винты работают по тем же принципам, что и стандартные роликовые винты, за исключением того, что функция гайки и винта по отношению к роликам обратная. Ролики перемещаются в осевом направлении внутри гайки, которая имеет удлиненную форму для обеспечения полного хода вала винта. Резьбовая часть винтового вала ограничена длиной резьбы роликов. Часть винта без резьбы может иметь гладкую или нецилиндрическую форму. Кольцевая шестерня заменена зубьями шестерни над и под резьбовой частью вала винта.
Помимо инверсии отношения роликов к гайке и винту, конфигурация и отношения перевернутых роликовых винтов соответствуют таковым у стандартных роликовых винтов.
 Патентный чертеж безкейджерного рециркулирующего роликового шнека (2006 г.) с легендой.
Патентный чертеж безкейджерного рециркулирующего роликового шнека (2006 г.) с легендой. Планетарный роликовый шнек рециркуляционного типа также известен как вторичный роликовый шнек. Роликовый винт с рециркуляцией может обеспечить очень высокую точность позиционирования за счет минимального шага резьбы. Ролики рециркулирующего роликового винта перемещаются в осевом направлении внутри гайки до тех пор, пока не будут возвращены в исходное положение после одного витка вокруг винта. Роликовые винты с рециркуляцией не используют зубчатые колеса. Карл Бруно Страндгрен был награжден патентом США на винт с рециркуляцией роликов в 1965 году.
Винт и гайка могут иметь очень тонкую одинаковую одно- или двухзаходную резьбу. Ролики рециркуляции имеют канавки (вместо резьбы), поэтому они перемещаются в осевом направлении при вращении зацепления с резьбой гайки и винта, смещаясь вверх или вниз на один шаг резьбы после завершения оборота вокруг винта. Узел гайки обычно включает клетку с прорезями и кулачковые кольца. Обойма захватывает ролики в удлиненных прорезях, равномерно разнесенных между роликами, обеспечивая вращение и осевое движение роликов. Кулачковые кольца имеют противоположные кулачки, совмещенные с осевой канавкой в стенке гайки. После того, как ролик совершает оборот вокруг гайки, он входит в канавку, отсоединяется от гайки и винта и проталкивается между кулачками к средней осевой точке узла гайки (смещаясь на расстояние, равное шагу винта). Вернувшись в исходное положение и снова закрепив гайку и винт, ролик может снова вращаться вокруг винта.
В 2006 году Чарльз К. Корнелиус и Шон П. Лоулор получили патент на безкейджерную систему рециркуляционных роликов. Как и в случае с традиционной системой винтового ролика с рециркуляцией, ролики отсоединяются от винта, когда они попадают в осевую канавку в стенке гайки. Система отличается тем, что ролики постоянно зацепляются гайкой, а осевая канавка гайки имеет резьбу. Неповоротная резьба в осевой канавке гайки возвращает ролик в исходное осевое положение (после завершения витка). Некруглые компрессионные кольца или кулачковые кольца на противоположных концах роликов (оси роликов) создают постоянное давление между роликами и гайкой, синхронизируя вращение роликов и толкая ролики в осевую канавку гайки. Без зубчатого венца и роликового сепаратора рециркуляционные роликовые винты без сепаратора могут быть относительно эффективными и, как следствие, обеспечивать более высокие динамические характеристики для некоторых диаметров вала винта.
 Патентный чертеж для Spiracon Роликовый винт (1986), с легендой.
Патентный чертеж для Spiracon Роликовый винт (1986), с легендой. В 1986 году Оливер Саари получил патент на роликовый винт с подшипниковым кольцом, обычно называемый его торговой маркой Spiracon. Этот тип соответствует орбите роликов вращению узла гайки. Привод содержит больше элементов передачи нагрузки, чем другие типы, кольцо подшипника и упорные подшипники, но изготовление составных частей относительно простое (например, зубья шестерни могут быть исключены).
В других типах роликовых винтовых пар, описанных выше, нагрузки передаются от гайки через ролики на винт (или в обратном порядке). В приводе этого типа упорные подшипники и свободно вращающееся кольцо подшипника с внутренней канавкой передают нагрузки между роликами и гайкой.
Винт имеет многозаходную резьбу. Ролики и герметизирующее вращающееся кольцо имеют одинаковые канавки, а не резьбу, поэтому между ними нет осевого перемещения. Узел гайки включает цилиндрический корпус с невращающимися распорными кольцами. Дистанционные кольца имеют равноудаленные отверстия, которые действуют как подшипники вращения для гладких шарнирных концов (шпилек) роликов. Упорные подшипники роликового типа между распорными кольцами и кольцом подшипника позволяют свободно вращать кольцо подшипника, передавая осевую нагрузку между ними.
Ролики действуют как «резьба» гайки в сборе, вызывая осевое перемещение вращающегося винта из-за их орбитального ограничения. Вращение винта раскручивает ролики, которые вращают кольцо подшипника, рассеивая вызванное нагрузкой трение.
Тимоти А. Эрхарт был награжден патентом США в 1996 году на линейный привод, эффективно включающий в себя роликовый винт с перевернутым подшипником. На валу шнека нарезаны канавки, длина которых соответствует длине роликов с канавками, которые перемещаются вместе с валом. Кольцо подшипника удлиненное и имеет внутреннюю резьбу на длину хода вала винта. Корпус узла гайки и уплотненное концевое кольцо образуют внешнюю часть узла привода.