
Вращающийся перевернутый маятник: классический педагогический пример применения теории управления
Фурута маятник или вращательный перевернутый маятник, состоит из ведомого рычага, который вращается в горизонтальной плоскости и маятнике, прикрепленный к этой руке, которая может свободно вращаться в вертикальной плоскости. Он был изобретен в 1992 году в Токийском технологическом институте Кацухиса Фурута и его коллегами. Это пример сложного нелинейного осциллятора, представляющего интерес в теории систем управления. Маятник underactuated и чрезвычайно нелинейный из - за гравитационные силы и муфты, вытекающих из Кориолиса и центростремительных сил. С тех пор десятки, возможно, сотни статей и диссертаций использовали систему для демонстрации линейных и нелинейных законов управления. Система также была предметом двух текстов.
СОДЕРЖАНИЕ
- 1 Уравнения движения
- 1.1 Определения
- 1.2 Предположения
- 1.3 Нелинейные уравнения движения
- 1.4 Упрощения
- 2 См. Также
- 3 ссылки
- 4 Дальнейшее чтение
- 5 Внешние ссылки
Уравнения движения
Несмотря на большое внимание, уделяемое системе, очень немногие публикации успешно извлекают (или используют) полную динамику. Многие авторы рассматривали инерцию вращения маятника только для одной главной оси (или вообще пренебрегали ею). Другими словами, тензор инерции имеет только один ненулевой элемент (или его нет), а оставшиеся два диагональных члена равны нулю. Можно найти систему маятника, в которой момент инерции по одной из трех главных осей приблизительно равен нулю, но не двум.
Некоторые авторы рассматривали тонкие симметричные маятники, в которых моменты инерции для двух главных осей равны, а оставшийся момент инерции равен нулю. Из десятков публикаций, рассмотренных для этой вики, было обнаружено, что только одна статья конференции и журнальная статья включают все три основных инерционных члена маятника. Обе статьи использовали лагранжевую формулировку, но каждая содержала незначительные ошибки (предположительно типографские).
Представленные здесь уравнения движения являются выдержкой из статьи о динамике маятника Фурута, разработанной в Университете Аделаиды.
Определения
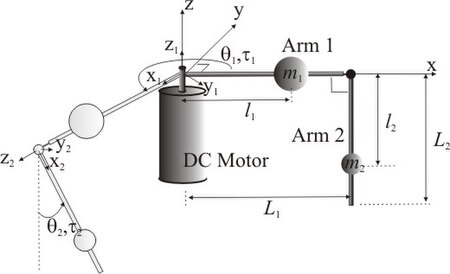
Рис. 1: Схема системы с одним вращающимся перевернутым маятником.
Рассмотрим вращающийся перевернутый маятник, установленный на двигателе постоянного тока, как показано на рис. 1. Двигатель постоянного тока используется для приложения крутящего момента к рычагу 1. Связь между рычагом 1 и рычагом 2 не приводится в действие, но может вращаться. Две руки имеют длину и. Руки имеют массы и которые расположены на и соответственно, которые являются длинами от точки поворота рычага до его центра масс. Плечи имеют тензоры инерции и (относительно центра масс плеч соответственно). Каждое вращательное соединение имеет вязкое демпфирование с коэффициентами демпфирования и, где - демпфирование, обеспечиваемое подшипниками двигателя, а - демпфирование, возникающее в результате шарнирного соединения между рычагом 1 и рычагом 2. 










Правая система координат использовалась для определения входов, состояний и декартовых систем координат 1 и 2. Оси координат плеча 1 и плеча 2 являются главными осями, так что тензоры инерции являются диагональными.
Угловое вращение рычага 1 измеряется в горизонтальной плоскости, где направление против часовой стрелки (если смотреть сверху) является положительным. Угловое вращение рычага 2 измеряется в вертикальной плоскости, где направление против часовой стрелки (если смотреть спереди) является положительным. Когда рука опущена в устойчивом положении равновесия. 


Крутящий момент, который серводвигатель прикладывает к рычагу 1, положительный в направлении против часовой стрелки (если смотреть сверху). Возмущающий момент,, воспринимается рычагом 2, где направление против часовой стрелки (если смотреть спереди) является положительным. 
Предположения
Перед выводом динамики системы необходимо сделать ряд предположений. Это:
- Предполагается, что вал двигателя и рычаг 1 жестко соединены и имеют неограниченную жесткость.
- Предполагается, что плечо 2 бесконечно жесткое.
- Оси координат Arm1 и Arm 2 являются главными осями, так что тензоры инерции диагональны.
- Предполагается, что инерцией ротора двигателя можно пренебречь. Однако этот член можно легко добавить к моменту инерции плеча 1.
- Учитывается только вязкое демпфирование. Все другие формы демпфирования (например, кулоновские) не учитывались, однако добавить это к окончательной управляющей DE несложно.
Нелинейные уравнения движения
Нелинейные уравнения движения имеют вид

и

Упрощения
Большинство маятников Furuta, как правило, имеют длинные тонкие плечи, так что момент инерции вдоль оси плеч пренебрежимо мал. Кроме того, большинство рычагов обладают симметрией вращения, так что моменты инерции в двух главных осях равны. Таким образом, тензоры инерции можно аппроксимировать следующим образом:
![{\ boldsymbol {J}} _ {1} = diag [J _ {{1xx}}, J _ {{1yy}}, J _ {1zz}}] = diag [0, J _ {{1}}, J _ {{ 1}}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/f48c4b03be29a76f82f364f8f35a0d29aa4ea2cd)
![{\ boldsymbol {J}} _ {2} = diag [J _ {{2xx}}, J _ {{2yy}}, J _ {{2zz}}] = diag [0, J _ {{2}}, J _ {{ 2}}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/7a42759224711cdd16c2f6665a22b4c0686b8467)
Дальнейшие упрощения можно получить, сделав следующие замены. Общий момент инерции рычага 1 относительно точки поворота (с использованием теоремы о параллельности осей) равен. Полный момент инерции рычага 2 относительно его точки поворота равен. Наконец, определите общий момент инерции, который испытывает ротор двигателя, когда маятник (плечо 2) находится в положении равновесия (свисает вертикально вниз),. 


Подстановка предыдущих определений в управляющие DE дает более компактную форму

и

Смотрите также
использованная литература
- ^ Фурута, К., Ямакита, М. и Кобаяши, С. (1992) «Управление поворотом перевернутого маятника с использованием обратной связи с псевдосостояниями», Журнал систем и инженерии управления, 206 (6), 263-269.
- ^ a b Xu, Y., Iwase, M. и Furuta, K. (2001) «Оптимальное по времени управление раскачиванием одиночного маятника», Journal of Dynamic Systems, Measurement, and Control, 123 (3), 518-527.
- ^ a b Фурута, К., Ивасе, М. (2004) «Анализ времени раскачивания маятника», Бюллетень Польской академии наук: Технические науки, 52 (3), 153-163.
- ^ a b Ивасе, М., Острём, К. Дж., Фурута, К. и Окессон, Дж. (2006) «Анализ безопасного ручного управления с использованием маятника Furuta», Труды Международной конференции IEEE по приложениям управления, 568-572.
- ^ J.A. Акоста, «Маятник Фуруты: консервативная нелинейная модель для теории и практики», Математические проблемы инженерии, вып. 2010, Идентификатор статьи 742894, 29 страниц. http://www.hindawi.com/journals/mpe/2010/742894.html
- ^ a b Окессон, Дж. и Остром, К. Дж. (2001) «Безопасное ручное управление маятником Furuta», In Proceedings 2001 IEEE International Conference on Control Applications (CCA'01), pp. 890-895.
- ^ Олфати-Сабер, Р. (2001) «Нелинейное управление неразработанными механическими системами с применением в робототехнике и аэрокосмических аппаратах», докторская диссертация, Департамент электротехники и информатики, Массачусетский технологический институт, Кембридж, Массачусетс. http://www.cds.caltech.edu/~olfati/thesis/
- ^ a b Фантони И. и Лозано Р. (2002) «Нелинейное управление неразработанными механическими системами», Springer-Verlag, Лондон.
- ^ a b Эгеланд О. и Гравдал Т. (2002) «Моделирование и симуляция для автоматического управления», Морская кибернетика, Тронхейм, Норвегия, 639 стр., ISBN 82-92356-00-2.
- ^ Хирата, Х., Хага, К., Анабуки, М., Оучи, С. и Ратироч-Анант, П. (2006) «Самонастраивающееся управление для перевернутого маятника вращения с использованием двух видов адаптивных контроллеров», Труды Конференция IEEE 2006 г. по робототехнике, автоматизации и мехатронике, 1–6. http://lab8.ec.u-tokai.ac.jp/RAM062.pdf
- ^ Ратироч-Анант, П., Анабуки, М. и Хирата, Х. (2004) «Самонастраивающееся управление вращательным перевернутым маятником на основе подхода собственных значений», Труды TENCON 2004, Конференция IEEE Region 10, Том D, 542-545. http://lab8.ec.u-tokai.ac.jp/TENCON2004_D-542.pdf
- ^ Баба, Ю., Идзуцу, М., Пан, Ю. и Фурута, К. (2006) «Разработка метода управления вращением маятника», Труды международной совместной конференции SICE-ICASE, Корея.
- ^ Крейг, К. и Автар, С. (2005) «Перевернутые маятниковые системы: пример конструкции мехатронной системы с вращающимся и управляемым рычагом», Труды 7-й Международной конференции Форума мехатроники, Атланта. http://www-personal.umich.edu/~awtar/craig_awtar_1.pdf
- ^ Awtar, С. Кинг, Н. Аллен, Т., челки, И., каганы, М., Skidmore, Д. и Крейг, К. (2002) «Перевернутые системы маятниковые: Rotary и вооружить привод - A Пример проектирования мехатронных систем », Мехатроника, 12, 357-370. http://www-personal.umich.edu/~awtar/invertedpendulum_mechatronics.pdf
- ^ a b Cazzolato, BS и Prime, Z (2011) «О динамике маятника Furuta», Журнал Control Science and Engineering, Volume 2011 (2011), ID статьи 528341, 8 страниц. http://downloads.hindawi.com/journals/jcse/2011/528341.pdf
дальнейшее чтение
внешние ссылки
