
Войти
XPIC, или технология подавления кросс-поляризационных помех, представляет собой алгоритм подавления взаимных помех между двумя принятыми потоками в Система связи с мультиплексированием с поляризационным разделением.
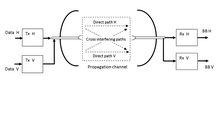
Компенсатор кросс-поляризационных помех (известный как XPIC) - это метод обработки сигналов, реализованный на демодулированных принятых сигналах на уровне основной полосы частот. Обычно это необходимо в системах мультиплексирования с поляризационным разделением : передаваемые источники данных кодируются и отображаются в модулирующие символы QAM со скоростью передачи символов системы и преобразуются с повышением частоты в несущая частота, генерирующая два радиопотока, излучаемых одной антенной с двойной поляризацией (см. диаграмму направленности параболической антенны ). Соответствующая антенна с двойной поляризацией расположена на удаленном узле и подключена к двум приемникам, которые преобразуют радиопотоки с понижением частоты в сигналы основной полосы частот (BB H, BB V).
Этот метод мультиплексирования / демультиплексирования основан на ожидаемом различении двух ортогональных поляризаций (XPD):
 Поляризационное разделение Система связи
Поляризационное разделение Система связи Как практическое следствие, на принимающей стороне два потока принимаются с остаточные взаимные помехи. Во многих практических случаях, особенно для модуляций высокого уровня M- QAM, система связи не может выдерживать испытанные уровни кросс-поляризационных помех, и необходимо улучшенное подавление. Две полученные поляризации на выходах антенны, обычно линейная горизонтальная H и вертикальная V, направляются каждая к приемнику, выходной сигнал основной полосы частот которого дополнительно обрабатывается специальной схемой подавления кросс-поляризации, обычно реализуемой как цифровой каскад. Алгоритм XPIC обеспечивает правильную реконструкцию H путем суммирования V с H для устранения любых остаточных помех, и наоборот.
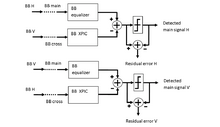 Схема подавления кросс-поляризации, включающая выравнивание на основном тракте, фильтрацию XPIC на кроссполяризованном компоненте и решение (нарезку) с вычислением остаточной ошибки
Схема подавления кросс-поляризации, включающая выравнивание на основном тракте, фильтрацию XPIC на кроссполяризованном компоненте и решение (нарезку) с вычислением остаточной ошибки Процесс подавления обычно реализуется с использованием двух блоков: основная полоса эквалайзер и baseband XPIC. Выходные данные последнего вычитаются из первого и затем отправляются на этап принятия решения, отвечающий за получение оценки потока данных. Блоки выравнивания и XPIC обычно адаптируются для правильного отслеживания изменяющейся во времени функции передачи канала: XPIC должен обеспечивать формирование принятого перекрестного сигнала, равного части перекрестных помех, влияющих на основной. Управление с обратной связью для управления критериями адаптации исходит из меры остаточной ошибки по блоку принятия решений.
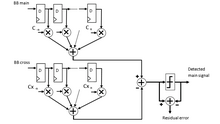 Этапы эквализации и фильтрации XPIC; выходной сигнал последнего вычитается из первого перед принятием решения и вычислением ошибки решения
Этапы эквализации и фильтрации XPIC; выходной сигнал последнего вычитается из первого перед принятием решения и вычислением ошибки решения В этом примере оба блока основаны на типичной структуре цифрового фильтра Finite Impulse Response и коэффициенты которого не фиксированы, а адаптированы для минимизации подходящего функционального 

Дано:
 : остаточная комплексная ошибка в момент времени
: остаточная комплексная ошибка в момент времени  ,
, : комплексная выборка основного принятого сигнала основной полосы частот в момент времени ,
: комплексная выборка основного принятого сигнала основной полосы частот в момент времени , : комплексная выборка перекрестно принятого сигнала основной полосы частот в момент времени ,
: комплексная выборка перекрестно принятого сигнала основной полосы частот в момент времени , : комплексный коэффициент эквалайзера основной полосы частот на ответвлении j и момент времени ,
: комплексный коэффициент эквалайзера основной полосы частот на ответвлении j и момент времени , : комплексный коэффициент XPIC при нажатии j и моменте времени ,
: комплексный коэффициент XPIC при нажатии j и моменте времени , : индекс касания
: индекс касания : результат отмены подачи действия устройство принятия решения в момент времени ,
: результат отмены подачи действия устройство принятия решения в момент времени , : оценка переданных данных в момент времени , поэтому = -
: оценка переданных данных в момент времени , поэтому = -  : размер шага или коэффициент сжатия для адаптивности,
: размер шага или коэффициент сжатия для адаптивности,если минимизируемая функция, например, средняя мощность остаточная ошибка, ![{\ displaystyle J = E [| \ epsilon _ {k} | ^ {2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8828beda6721b9f4c2a9fdd17f3f97c9e69c945e)
 ;
; ;
;, где звездочка означает комплексное сопряжение. Для этой базовой схемы не требуется никаких априорных знаний о передаваемых символах (слепой или с нулевым разглашением ).
Когда задержка